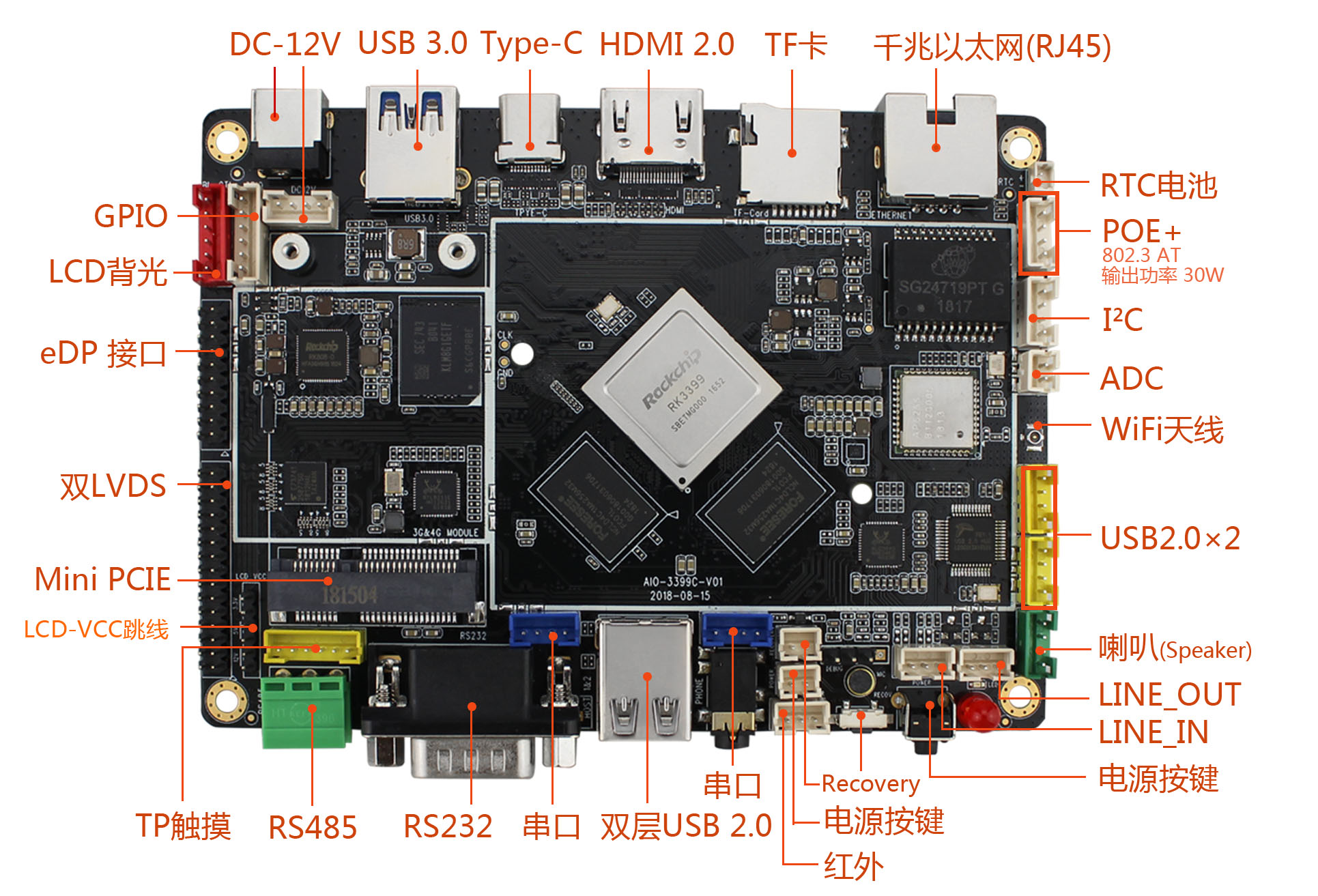
 fireflyAIO-3399C--I2C主板控制器介紹
fireflyAIO-3399C--I2C主板控制器介紹
I2C 使用
簡介
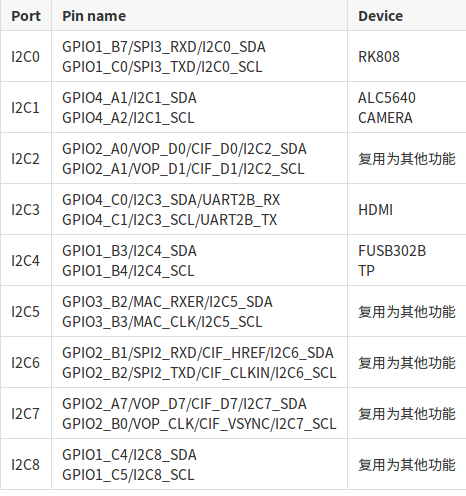
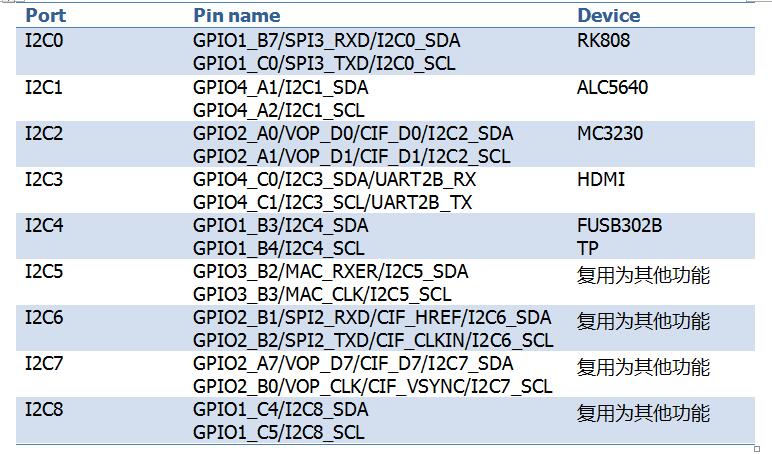
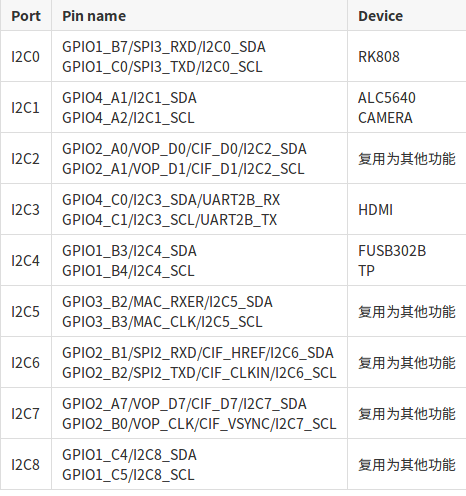
AIO-3399C 開發板上有 9 個片上 I2C 控制器,各個 I2C 的使用情況如下表:
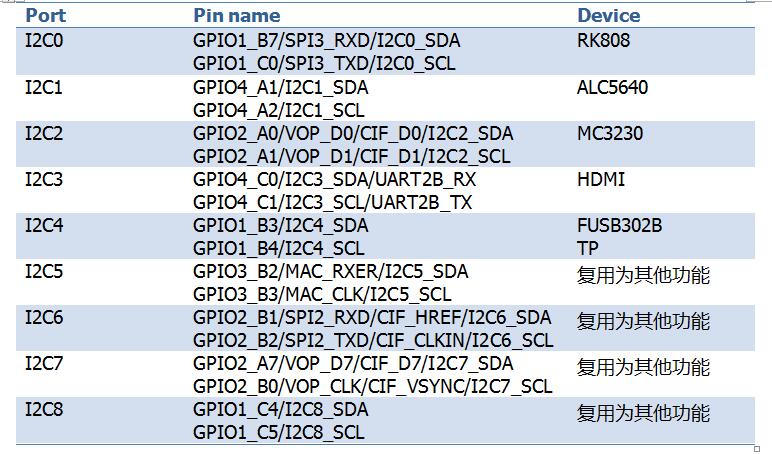
本文主要描述如何在該開發板上配置 I2C。
配置 I2C 可分為兩大步驟:
定義和注冊 I2C 設備
定義和注冊 I2C 驅動
下面以配置 GSL3680 為例。
定義和注冊 I2C 設備
在注冊I2C設備時,需要結構體 i2c_client 來描述 I2C 設備。然而在標準Linux中,用戶只需要提供相應的 I2C 設備信息,Linux就會根據所提供的信息構造 i2c_client 結構體。
用戶所提供的 I2C 設備信息以節點的形式寫到 dts 文件中,如下所示:
kernel/arch/arm64/boot/dts/rockchip/rk3399-firefly-mini-edp.dts &i2c4 { status = “okay”; gsl3680: gsl3680@41 { compatible = “gslX680”; reg = 《0x41》; screen_max_x = 《1536》; screen_max_y = 《2048》; touch-gpio = 《&gpio1 20 IRQ_TYPE_LEVEL_LOW》; reset-gpio = 《&gpio0 12 GPIO_ACTIVE_HIGH》; }; };
定義和注冊 I2C 驅動
定義 I2C 驅動
在定義 I2C 驅動之前,用戶首先要定義變量 of_device_id 和 i2c_device_id 。
of_device_id 用于在驅動中調用dts文件中定義的設備信息,其定義如下所示:
static struct of_device_id gsl_ts_ids[] = { {.compatible = “gslX680”}, {} };
定義變量 i2c_device_id:
static const struct i2c_device_id gsl_ts_id[] = { {GSLX680_I2C_NAME, 0}, {} }; MODULE_DEVICE_TABLE(i2c, gsl_ts_id);
i2c_driver 如下所示:
static struct i2c_driver gsl_ts_driver = { .driver = { .name = GSLX680_I2C_NAME, .owner = THIS_MODULE, .of_match_table = of_match_ptr(gsl_ts_ids), }, #ifndef CONFIG_HAS_EARLYSUSPEND //.suspend = gsl_ts_suspend, //.resume = gsl_ts_resume, #endif .probe = gsl_ts_probe, .remove = gsl_ts_remove, .id_table = gsl_ts_id, };
注:變量id_table指示該驅動所支持的設備。
注冊 I2C 驅動
使用i2c_add_driver函數注冊 I2C 驅動。
i2c_add_driver(&gsl_ts_driver);
在調用 i2c_add_driver 注冊 I2C 驅動時,會遍歷 I2C 設備,如果該驅動支持所遍歷到的設備,則會調用該驅動的 probe 函數。
通過 I2C 收發數據
在注冊好 I2C 驅動后,即可進行 I2C 通訊。
向從機發送信息:
int i2c_master_send(const struct i2c_client *client, const char *buf, int count) { int ret; struct i2c_adapter *adap = client-》adapter; struct i2c_msg msg; msg.addr = client-》addr; msg.flags = client-》flags & I2C_M_TEN; msg.len = count; msg.buf = (char *)buf; ret = i2c_transfer(adap, &msg, 1); /* + If everything went ok (i.e. 1 msg transmitted), return #bytes + transmitted, else error code. */ return (ret == 1) ? count : ret; }
向從機讀取信息:
int i2c_master_recv(const struct i2c_client *client, char *buf, int count) { struct i2c_adapter *adap = client-》adapter; struct i2c_msg msg; int ret; msg.addr = client-》addr; msg.flags = client-》flags & I2C_M_TEN; msg.flags |= I2C_M_RD; msg.len = count; msg.buf = buf; ret = i2c_transfer(adap, &msg, 1); /* + If everything went ok (i.e. 1 msg received), return #bytes received, + else error code. */ return (ret == 1) ? count : ret; } EXPORT_SYMBOL(i2c_master_recv);
FAQs
Q1: 通信失敗,出現這種log:”timeout, ipd: 0x00, state: 1”該如何調試?
A1: 請檢查硬件上拉是否給電。
Q2: 調用i2c_transfer返回值為-6?
A2: 返回值為-6表示為NACK錯誤,即對方設備無應答響應,這種情況一般為外設的問題,常見的有以下幾種情況:
I2C地址錯誤,解決方法是測量I2C波形,確認是否I2C 設備地址錯誤;
I2C slave 設備不處于正常工作狀態,比如未給電,錯誤的上電時序等;
時序不符合 I2C slave設備所要求也會產生Nack信號。
Q3: 當外設對于讀時序要求中間是stop信號不是repeat start信號的時候,該如何處理?
A3: 這時需要調用兩次i2c_transfer, I2C read 拆分成兩次,修改如下:
static int i2c_read_bytes(struct i2c_client *client, u8 cmd, u8 *data, u8 data_len) { struct i2c_msg msgs[2]; int ret; u8 *buffer; buffer = kzalloc(data_len, GFP_KERNEL); if (!buffer) return -ENOMEM;; msgs[0].addr = client-》addr; msgs[0].flags = client-》flags; msgs[0].len = 1; msgs[0].buf = &cmd; ret = i2c_transfer(client-》adapter, msgs, 1); if (ret 《 0) { dev_err(&client-》adapter-》dev, “i2c read failed\n”); kfree(buffer); return ret; } msgs[1].addr = client-》addr; msgs[1].flags = client-》flags | I2C_M_RD; msgs[1].len = data_len; msgs[1].buf = buffer; ret = i2c_transfer(client-》adapter, &msgs[1], 1); if (ret 《 0) dev_err(&client-》adapter-》dev, “i2c read failed\n”); else memcpy(data, buffer, data_len); kfree(buffer); return ret; }
-
Linux
+關注
關注
87文章
11304瀏覽量
209503 -
嵌入式主板
+關注
關注
7文章
6085瀏覽量
35337 -
Firefly
+關注
關注
2文章
538瀏覽量
7045
發布評論請先 登錄
相關推薦
基于Verilog的I2C控制器的設計與綜合
fireflyAIO-3399C主板接口介紹
fireflyAIO-3399C主板散熱介紹
fireflyAIO-3399C主板屏幕模組介紹

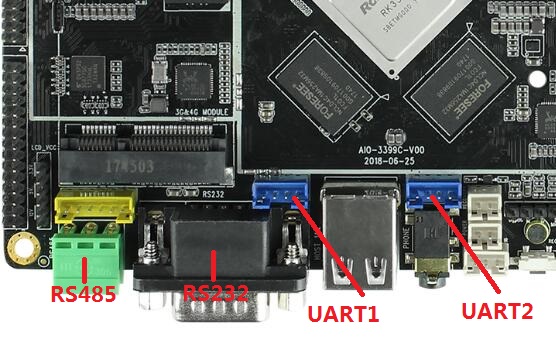
fireflyAIO-3399C主板UART介紹
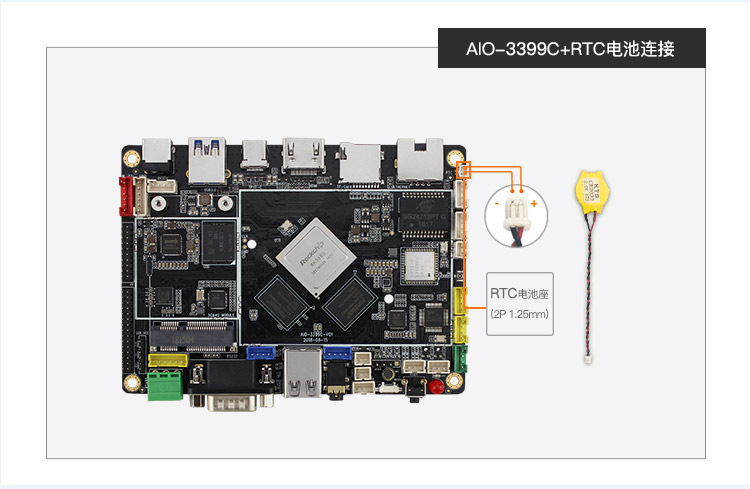
fireflyAIO-3399C主板RTC介紹
fireflyAIO-3399C主板ADC介紹
I2C控制器驅動介紹





 工商網監
工商網監
評論