") dfrobot2自由度DF05BB舵機云臺介紹
dfrobot2自由度DF05BB舵機云臺介紹






簡介
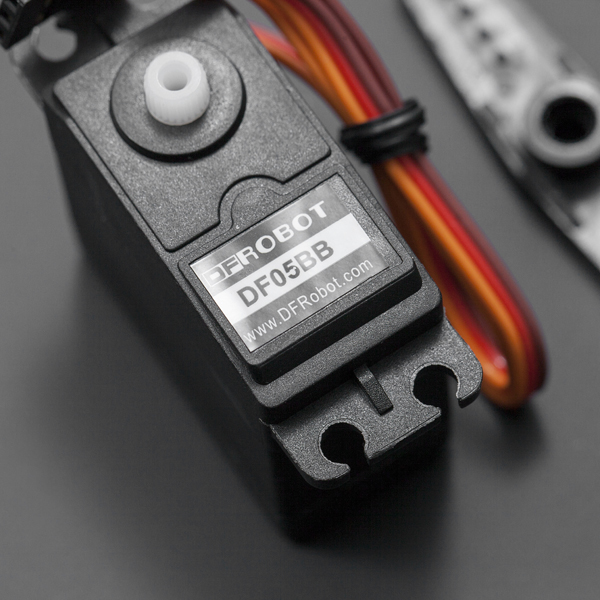
二自由度DF05BB舵機云臺是一款5公斤大扭矩、高性價比的小型云臺,可以在水平和垂直方向做二自由度運動,方便安裝攝像頭,可以實現(xiàn)圖像監(jiān)控、圖像識別定位追蹤;加裝紅外傳感器或超聲波測距傳感器可以組合成一體化探測裝置,使機器人能感測周圍障礙物,從而實現(xiàn)機器人避障功能。當然也可以安裝各種傳感器,通過Arduino控制器完成各種新穎的互動作品。
技術(shù)規(guī)格
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
嵌入式主板
+關(guān)注
關(guān)注
7文章
6085瀏覽量
35341 -
DFRobot
+關(guān)注
關(guān)注
4文章
1158瀏覽量
9532
發(fā)布評論請先 登錄
相關(guān)推薦
二自由度WIFI 履帶車 PS2 無線控制 手機安卓控制項目計劃(連載)
連接實現(xiàn)對小車方向控制和4自由度機械手任意角度控制從而實現(xiàn)指定地點指定物體的抓取1.實現(xiàn)項目功能需要外圍模塊介紹(履帶車 4自由度機械手 電機驅(qū)動51舵機可編程主控板 電池 藍牙模塊)
發(fā)表于 08-04 23:05
51/stm32單片機控制6自由度機械臂(帶云臺)二次開發(fā)是用什么傳感器定位比較好?
51/stm32單片機控制6自由度機械臂(帶云臺)二次開發(fā)是用什么傳感器定位比較好?
發(fā)表于 03-31 09:13
三自由度轉(zhuǎn)臺的設計與實現(xiàn)
基于MSP430F149單片機設計了一種三自由度轉(zhuǎn)臺系統(tǒng)。在該系統(tǒng)中,利用旋轉(zhuǎn)編碼器的信息反饋,通過對電機的閉環(huán)控制,使三自由度轉(zhuǎn)臺能夠模擬飛機的飛行姿態(tài)。
發(fā)表于 09-26 13:58
?2568次閱讀

dfrobot6自由度慣導擴展板介紹
這是一款兼容Arduino的有6自由度傳感器擴展板,它使用了一個ADXL345三軸加速器和一個ITG-3200三軸螺旋儀。
dfrobotDFLG6DOF 6自由度機械臂簡介
小型廉價的6自由度機械臂,希望能圓大家一個玩機械手的夢! DFLG6DOF機械手由6個微型伺服電機(舵機)組成,分別對應于臂、肘、腕(2個自由度)、張合5個關(guān)節(jié)和1個旋轉(zhuǎn)底座,每個關(guān)節(jié)

dfrobot5自由度機械臂DFLG5DOF簡介
個玩機械手的夢! DFLG5DOF機械手由5個微型伺服電機(舵機)組成,分別對應于臂、肘、腕(2個自由度)、張合5個關(guān)節(jié),每個關(guān)節(jié)可在一定范圍內(nèi)運動。通過上位機控制軟件給舵機控制器發(fā)送

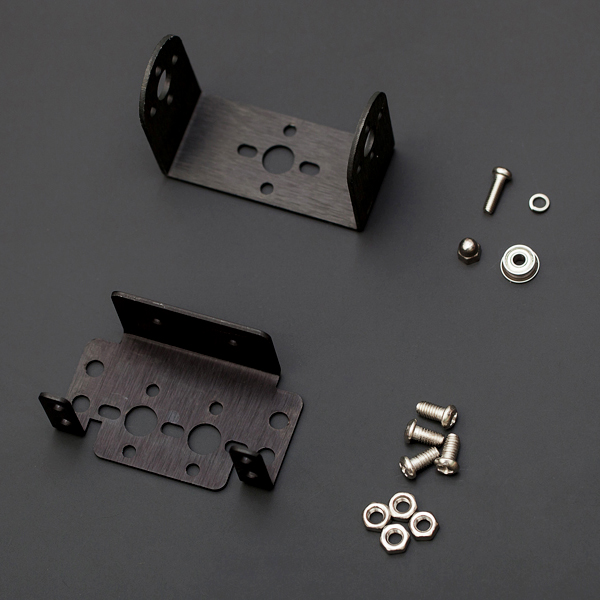
dfrobot云臺舵機支架套件簡介
多功能鋁合金舵機支架專門用于舵機固定,配合杯士軸承和U型支架即可組合成云臺、機械手,機器人關(guān)節(jié)。
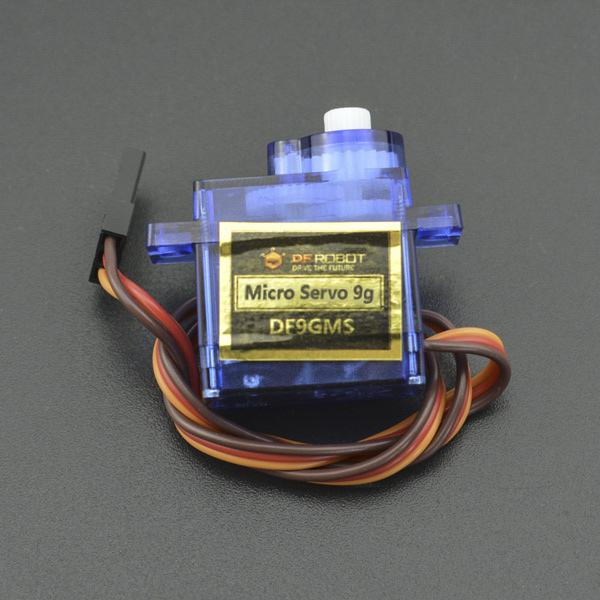
DFRobot DF9GMS 180° 微型舵機介紹
由DFRobot 出品的DF9GMS 180°微型舵機,該舵機采用高強度ABS透明外殼配以內(nèi)部高精度尼龍齒輪組,加上精準的控制電路、高檔輕量化空心杯電機使該微型
dfrobotDSS-P05機器人專用舵機介紹
DSS-P05舵機是DFRobot出品的優(yōu)質(zhì)舵機,具有控制精度高、響應速度快等優(yōu)點。
dfrobot迷你2自由度云臺簡介
兩軸尼龍云臺重20克,適合9g-12g舵機使用,外形美觀,制作精密,結(jié)合緊密無晃動,有舵機線繞線夾。

4自由度串聯(lián)機械臂的制作
1. 運動功能說明 ? ? R204樣機是一款擁有4個自由度的串聯(lián)機械臂。本文示例實現(xiàn)4自由度串聯(lián)機械臂抓取物品、放下的功能。 2. 結(jié)構(gòu)說明 ? ?R204號樣機由4個串聯(lián)的 舵機關(guān)

淺談工業(yè)機器人自由度
工業(yè)機器人自由度一般分為4個自由度,或者6個自由度,關(guān)節(jié)機器人主要是模仿人的手臂進行設計的。
發(fā)表于 03-16 12:20
?2988次閱讀
如何制作一個2自由度并聯(lián)仿生腿?
本文實例將實現(xiàn)2自由度并聯(lián)仿生腿模組運動起來,模擬實現(xiàn)狗腿行走的動作。
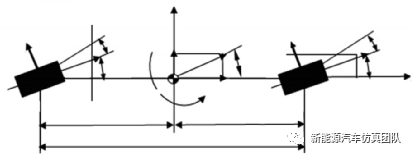
基于Simulink的汽車2自由度模型
本期采用Simulink建立汽車2自由度動力學模型。為了便于掌握汽車穩(wěn)定性的基本特性,對汽車簡化為線性二自由度的汽車模型,忽略轉(zhuǎn)向系統(tǒng)的影響,直接一前輪轉(zhuǎn)角作為輸入;忽略懸架的作用,認為汽車車廂只作用于地面的平面運動。
發(fā)表于 06-28 16:39
?2557次閱讀





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論