") 基于MOSFET和IGBT器件在電機控制應(yīng)用中的選擇
基于MOSFET和IGBT器件在電機控制應(yīng)用中的選擇
長期以來,發(fā)動機控制一直處于研究和開發(fā)活動的前沿,其目標(biāo)是在兩個層面上找到有效和高效的微電子解決方案,一個是計算軟件,另一個是可以在微電子層次集成的電力電子硬件硬件。
電動機控制器的目的是能夠手動或自動作用于電動機上(起停、前進(jìn)-反轉(zhuǎn)、速度、扭轉(zhuǎn)和防止電壓過載)。電機控制的集成電路(ICs)在應(yīng)用領(lǐng)域的各個方面都代表了創(chuàng)新的關(guān)鍵時刻,這些應(yīng)用領(lǐng)域?qū)Τ杀尽⒊叽纭⑿阅艿纫蛩靥貏e敏感。汽車行業(yè)和工業(yè)自動化無疑是最具代表性的行業(yè)。
市場提供不同類型的電動機,因此,控制策略取決于它們的結(jié)構(gòu)。直流永磁電機的定子由兩個或兩個以上的磁極組成。另一方面,轉(zhuǎn)子由連接到機械開關(guān)的繞組組成。
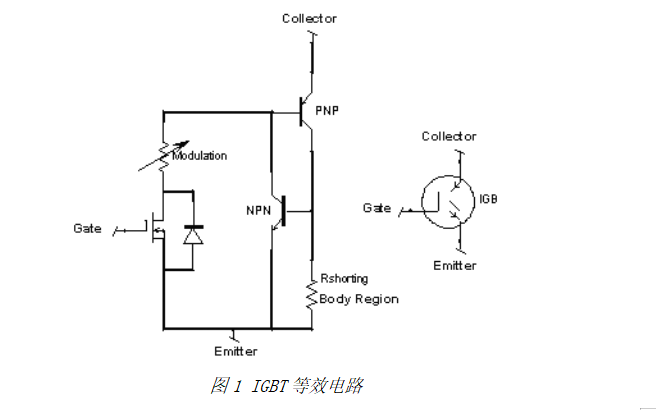
無刷直流電動機的英文縮寫是BLDC,這是一種帶有永磁體的同步無刷電機,永磁體圍繞固定的電樞旋轉(zhuǎn)(圖1):其轉(zhuǎn)子和定子以相同的頻率旋轉(zhuǎn)。轉(zhuǎn)子和電機定子之間的切換不是機械的,而是電子的。不像刷直流,它不需要連接到電機軸的功能。

圖1:無刷直流電動機使用基于位置傳感器和MCU的電子開關(guān)系統(tǒng),該系統(tǒng)確定將正時扭矩施加到電動機的開關(guān)正時
在有刷電動機中,轉(zhuǎn)子和電刷通過反轉(zhuǎn)磁場產(chǎn)生連續(xù)改變方向的電流。 另一方面,在無刷電動機中,電流反轉(zhuǎn)是通過微控制器控制的一組功率晶體管(通常為IGBT)以電子方式獲得的。 他們駕駛的主要問題是了解發(fā)動機的確切位置。 只有這樣,控制器才能知道要操作哪個相(圖2和3)。 通常通過使用霍爾效應(yīng)傳感器或光學(xué)型傳感器來獲得轉(zhuǎn)子相對于定子的位置。
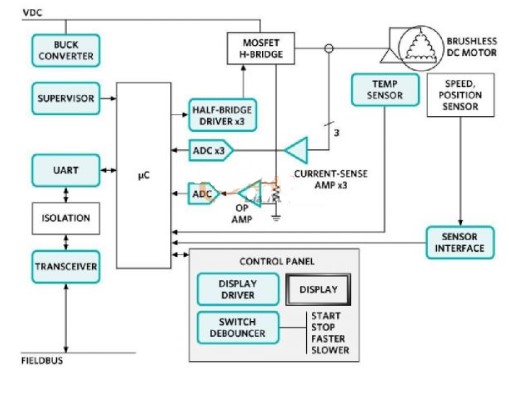
圖2:用于無刷電動機的應(yīng)用電路
直流無刷電機的典型應(yīng)用是無法更換零件(電刷)的,因為這些系統(tǒng)是密封的(例如硬盤)。
MAX14871直流電動機驅(qū)動器為電壓在4.5V至36V之間的有刷電動機提供了簡單的驅(qū)動器。 它具有無泵充電設(shè)計,可減少外部組件并降低電源電流。
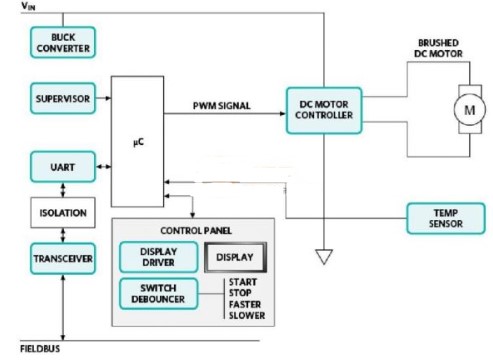
圖3:有刷電機的應(yīng)用電路
來自RHOM半導(dǎo)體的BD63005AMUV是一個三相無刷電機驅(qū)動,額定供電電壓為33V,額定輸出電流為2A(峰值3.5A)。它從霍爾傳感器產(chǎn)生驅(qū)動信號,通過輸入控制信號驅(qū)動PWM。此外,該電源可以使用12v或24v,并具有各種控制和綜合保護(hù)功能,使之適用于各種用途。
無刷直流電動機(BLDC)在家用電器和消費類電子產(chǎn)品中非常受歡迎。在這些應(yīng)用中,需要高效率的標(biāo)準(zhǔn),因此需要更好的技術(shù)來將總功率損耗降至最低。
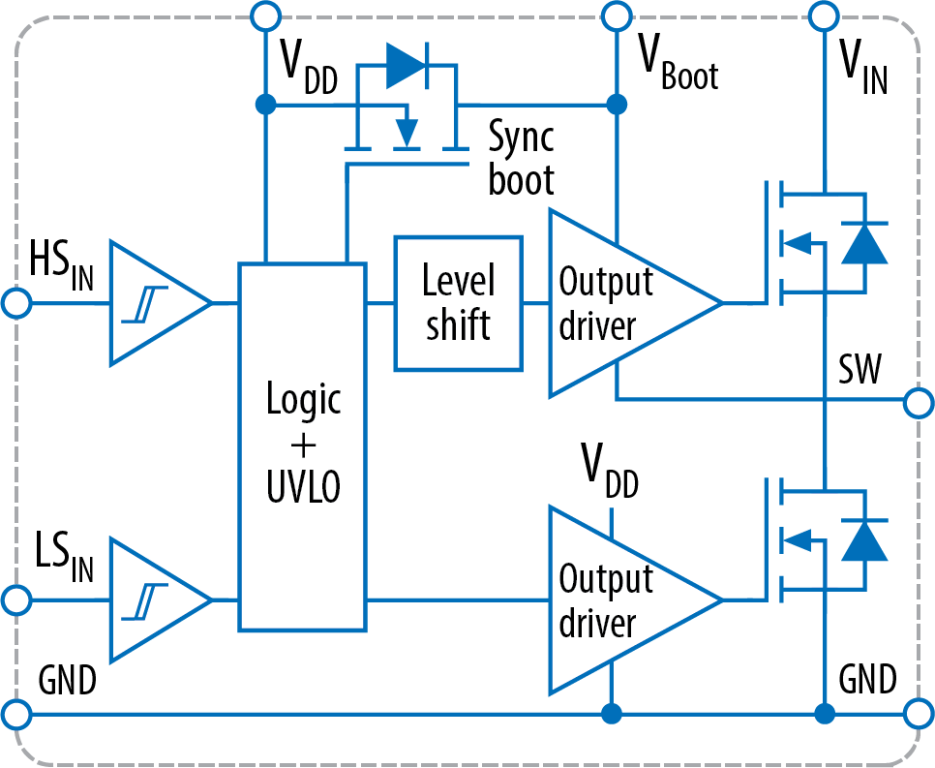
Power Integration BridgeSwitch driver系列采用高側(cè)和低側(cè)高級FREDFET系列(快速恢復(fù)二極管場晶體管),在300w無刷直流電機驅(qū)動應(yīng)用中效率超過98.5%。巨大的效率和分布式熱足跡架構(gòu)消除了散熱器的需求,降低了系統(tǒng)成本和重量(圖4)。
BridgeSwitch提供內(nèi)部故障保護(hù)功能和外部系統(tǒng)級監(jiān)視。外部監(jiān)控包括具有四個欠壓電平和一個過壓電平的直流總線感測以及驅(qū)動。
電源控制是軟件和硬件的固有組合。硬件組件由諸如IGBT、功率二極管之類的電子控制設(shè)備表示,而軟件組件是與硬件組件的(硬件組件控制)控制相關(guān)的組件,其中控制模型變得越來越復(fù)雜。
該電機控制電路的目標(biāo)是快速激活和停用線圈中的電流,以最小的開關(guān)或傳導(dǎo)損耗。它需要使用MOSFET和IGBT。這兩種半導(dǎo)體器件均滿足電機控制的需求,事實證明適用于不同的應(yīng)用場合。在大多數(shù)應(yīng)用中,它們用于H橋配置,在這種結(jié)構(gòu)中,它們可以完全控制電動機的速度和方向。
責(zé)任編輯:gt
-
MOSFET
+關(guān)注
關(guān)注
147文章
7210瀏覽量
213785 -
電動機
+關(guān)注
關(guān)注
75文章
4118瀏覽量
96726 -
IGBT
+關(guān)注
關(guān)注
1267文章
3818瀏覽量
249483
發(fā)布評論請先 登錄
相關(guān)推薦
IGBT在半橋式電機控制中的使用
電機控制中的MOSFET和IGBT基礎(chǔ)知識
【技術(shù)】MOSFET和IGBT區(qū)別?
MOSFET 和 IGBT的區(qū)別
一文解讀mosfet與igbt的區(qū)別
為什么說新能源汽車的核心器件是IGBT而不是MOSFET?IGBT或MOSFET的驅(qū)動電路有什么區(qū)別呢?詳情見資料
MOSFET與IGBT的本質(zhì)區(qū)別
EV和充電樁:IGBT和MOSFET工程選型9個異同點
針對電機控制應(yīng)用如何選擇寬帶隙器件?
為什么說IGBT是由BJT和MOSFET組成的器件?
在SMPS應(yīng)用中選擇IGBT和MOSFET的比較
在SMPS應(yīng)用中如何選擇IGBT和MOSFET詳細(xì)資料比較
GaN功率器件在工業(yè)電機控制領(lǐng)域的應(yīng)用
MOSFET和IGBT區(qū)別及高導(dǎo)熱絕緣氮化硼材料在MOSFET的應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論