") 水下作業(yè)小能手
水下作業(yè)小能手
水下滑翔機(jī)水下導(dǎo)航定位精度的提高對(duì)于滑翔機(jī)完成海洋環(huán)境觀測(cè)、資源探測(cè)、海洋目標(biāo)識(shí)別與定位等任務(wù)至關(guān)重要。現(xiàn)有的水下滑翔機(jī)的導(dǎo)航技術(shù)多以航位推算搭配全球定位系統(tǒng)(GPS)為主。隨著導(dǎo)航技術(shù)的進(jìn)步,慣性導(dǎo)航、聲學(xué)導(dǎo)航、海洋地球物理導(dǎo)航和組合導(dǎo)航等技術(shù)將更多地應(yīng)用于水下滑翔機(jī)。基于此,文中簡(jiǎn)要介紹了水下導(dǎo)航技術(shù)原理、分類以及常用算法,綜述了水下滑翔機(jī)導(dǎo)航相關(guān)技術(shù)研究與應(yīng)用的國(guó)內(nèi)外現(xiàn)狀,探討了水下滑翔機(jī)冰下導(dǎo)航的技術(shù)難點(diǎn)和發(fā)展趨勢(shì)。文中的工作可為水下滑翔機(jī)導(dǎo)航技術(shù)的深入研究與試驗(yàn)應(yīng)用提供依據(jù)。
水下滑翔機(jī)依靠調(diào)節(jié)浮力實(shí)現(xiàn)升沉,借助機(jī)翼產(chǎn)生水動(dòng)力進(jìn)行滑翔運(yùn)動(dòng),具有低噪聲、長(zhǎng)航程、大潛深等特點(diǎn),可對(duì)海洋信息進(jìn)行長(zhǎng)時(shí)序、大范圍的觀測(cè)與探測(cè)[1]。作為認(rèn)識(shí)海洋、經(jīng)略海洋、保護(hù)海洋的一種重要工具,水下滑翔機(jī)在海洋科學(xué)探索、海洋資源開(kāi)發(fā)以及海洋國(guó)防安全方面具有廣泛的應(yīng)用前景。
為了完成觀測(cè)與探測(cè)任務(wù),水下滑翔機(jī)需沿預(yù)設(shè)路徑航行,為此需要進(jìn)行水下導(dǎo)航。導(dǎo)航定位技術(shù)對(duì)保障水下滑翔機(jī)的工作效能和航行安全至關(guān)重要[2],此外,導(dǎo)航定位精度也是水下滑翔機(jī)重要的技術(shù)指標(biāo)[3-5]。水下滑翔機(jī)的導(dǎo)航包括水面和水下導(dǎo)航,其中,水下導(dǎo)航是一種將無(wú)人水下航行器由起始點(diǎn)引導(dǎo)到目標(biāo)點(diǎn)的技術(shù),基本參數(shù)為其位置、速度和航向[6]。
目前較為常見(jiàn)的水下導(dǎo)航方法有:航位推算法、慣性導(dǎo)航、聲學(xué)導(dǎo)航、海洋地球物理導(dǎo)航和組合導(dǎo)航技術(shù)[7-8]。航位推算法憑借小能耗和低成本的優(yōu)點(diǎn),在水下滑翔機(jī)中被廣泛使用于水下滑翔機(jī)。;慣性導(dǎo)航系統(tǒng)(inertial navigation system,INS)不依賴于外部信息源,是自主導(dǎo)航中的一種,常作為組合導(dǎo)航中的主導(dǎo)航系統(tǒng)。;聲學(xué)導(dǎo)航可分為長(zhǎng)基線(long baseline,LBL)、短基線(short baseline,SBL)和超短基線(ultra short baseline,USBL)3種。;海洋地球物理導(dǎo)航利用地球本身物理特征進(jìn)行導(dǎo)航,主要分為地磁輔助導(dǎo)航、地形輔助導(dǎo)航和重力輔助導(dǎo)航,優(yōu)點(diǎn)是具有自主性強(qiáng)、隱蔽性好、不受地域和時(shí)間限制等優(yōu)點(diǎn)。;組合導(dǎo)航技術(shù)是指將多種導(dǎo)航方式結(jié)合在一起,它是水下導(dǎo)航未來(lái)的重要發(fā)展方向。以卡爾曼濾波為代表,基于狀態(tài)空間分析的以卡爾曼濾波為代表的最優(yōu)估計(jì)法是水下組合導(dǎo)航的關(guān)鍵技術(shù)。
為明晰水下滑翔機(jī)導(dǎo)航技術(shù)發(fā)展現(xiàn)狀,文中從以下幾方面對(duì)其進(jìn)行梳理:
1)簡(jiǎn)要闡述導(dǎo)航技術(shù)原理及常用的導(dǎo)航算法;
2)介紹水下導(dǎo)航相關(guān)的技術(shù)研究與應(yīng)用情況的國(guó)內(nèi)外現(xiàn)狀;
3)分析水下滑翔機(jī)在冰下導(dǎo)航的技術(shù)難點(diǎn)和發(fā)展情況。
1水下導(dǎo)航技術(shù)原理
1.1航位推算
1.2慣性導(dǎo)航
1.3聲學(xué)導(dǎo)航
1.4海洋地球物理導(dǎo)航
1.5組合導(dǎo)航
2水下滑翔機(jī)導(dǎo)航技術(shù)發(fā)展現(xiàn)狀
相較于其他類型的無(wú)人水下航行器,水下滑翔機(jī)的體積更小,質(zhì)量更輕,但相應(yīng)的負(fù)載能力有限。水下滑翔機(jī)需要在水下長(zhǎng)期工作,同時(shí)又要保證導(dǎo)航精度的前提下,對(duì)其所攜帶導(dǎo)航設(shè)備的體積、質(zhì)量和能耗提出了更嚴(yán)格的要求。
2.1水下航位推算技術(shù)
簡(jiǎn)單的航位推算形式只需電子羅盤(pán)和深度傳感器的組合即可實(shí)現(xiàn)水下導(dǎo)航。例如,Scripps海洋研究所(Scripps institution of oceanography)研制的Spray水下滑翔機(jī)[24]在水面獲得定位信息后,通過(guò)搭載的TCM2電子羅盤(pán)以及211-38型深度計(jì),就能夠推算出向目標(biāo)點(diǎn)位置運(yùn)動(dòng)的目標(biāo)航向、姿態(tài)角度等航行參數(shù)。
華盛頓大學(xué)的Seaglider水下滑翔機(jī)[25]根據(jù)水下的推算位置在水面的投影與期望位置之間的差值,利用KF進(jìn)行定位估計(jì)。如果海流速度與Seaglider的水平滑翔速度相當(dāng),則根據(jù)KF算法,用深度平均流來(lái)建立海流模型,基于海流模型參數(shù)推算向目標(biāo)航點(diǎn)前進(jìn)的最優(yōu)航向與速度。Seaglider水下滑翔機(jī)浮出水面時(shí)利用Garmin 25 HVS型GPS模塊進(jìn)行導(dǎo)航誤差修正。如果海流速度超過(guò)航速,Seaglider會(huì)選擇使目標(biāo)距離增加最小的方向作為目標(biāo)航向。
計(jì)入從上一個(gè)出水位置到當(dāng)前出水位置之間沿滑翔機(jī)軌跡得出的平均流速估計(jì)值,融合到航位推算中,對(duì)提高導(dǎo)航精度有一定效果[26]。但這種估計(jì)方法沒(méi)有考慮流場(chǎng)的時(shí)空變化,與實(shí)際流速存在較大偏差,導(dǎo)航精度改善有限。Webb Research Corp研制的Slocum水下滑翔機(jī)[27]將航位推算與多普勒測(cè)速結(jié)合,利用DVL實(shí)測(cè)海流數(shù)據(jù),提高航位推算精度。
采用數(shù)據(jù)同化調(diào)整模型[28],融合衛(wèi)星、船只、浮標(biāo)和滑翔機(jī)的實(shí)時(shí)或遠(yuǎn)程觀測(cè)數(shù)據(jù),可進(jìn)一步提高海流預(yù)測(cè)模型的準(zhǔn)確性。Szwaykowska等[29]研究了基于海洋模型的真實(shí)環(huán)境并模擬水下航行器位置誤差增長(zhǎng)的界限,這種誤差分析方法可用于提高海洋模型的精度和導(dǎo)航算法的性能。Hart等[30]開(kāi)發(fā)了一種基于A*算法的最優(yōu)路徑規(guī)劃算法。該算法結(jié)合區(qū)域海洋模型,通過(guò)對(duì)滑翔機(jī)運(yùn)動(dòng)軌跡的預(yù)測(cè),生成仿真滑翔機(jī)運(yùn)動(dòng)軌跡模型。由于沒(méi)有對(duì)算法的估計(jì)流速與滑翔機(jī)的觀測(cè)流速進(jìn)行比較,無(wú)法驗(yàn)證模型的正確性[31]。Chang等[32]提出一種由海洋模型預(yù)測(cè)輔助的Slocum實(shí)時(shí)導(dǎo)航算法,并于2012~2013年底在美國(guó)南卡羅萊納附近海域進(jìn)行海試,試驗(yàn)結(jié)果驗(yàn)證了海流預(yù)測(cè)模型可提高滑翔機(jī)的導(dǎo)航性能[33]。Szwaykowska等[29]聚焦于較小海域的水下滑翔機(jī)工作情況,根據(jù)多架滑翔機(jī)的測(cè)量數(shù)據(jù)作為反饋,對(duì)模型進(jìn)行實(shí)時(shí)調(diào)整,從而提高水下滑翔機(jī)在海洋中的導(dǎo)航性能。這種方法相比基于航位推算和水下流速估計(jì)的導(dǎo)航方法擁有更高的導(dǎo)航性能,當(dāng)存在明顯時(shí)空變化的流場(chǎng)時(shí),具有更好的可靠性。
2.2慣性導(dǎo)航技術(shù)
INS可為水下滑翔機(jī)提供較精確的定位信息。現(xiàn)階段,INS在質(zhì)量、精度和能耗等多方面存在應(yīng)用瓶頸,導(dǎo)致這種方法未在水下滑翔機(jī)中得到廣泛應(yīng)用,Huang等[34-35]展示了微型機(jī)電系統(tǒng)(micro electro mechanical system,MEMS)在水下滑翔機(jī)中的試驗(yàn)性應(yīng)用。Jenkins等[36]提出一種應(yīng)用于水下滑翔機(jī)的緊湊型慣導(dǎo)系統(tǒng)——iXSEA U-phins,其重約2.14 kg,體積2 100 cm3,功耗為3 W(見(jiàn)圖)。
圖iXSEA U-phins慣性導(dǎo)航系統(tǒng)
慣性測(cè)量元件的精度直接決定了SINS的精度水平。當(dāng)前SINS常用的陀螺儀類型有激光陀螺儀、光纖陀螺儀及微機(jī)電陀螺儀等。國(guó)外的陀螺儀已進(jìn)入光學(xué)和微機(jī)電時(shí)代,精度不斷提高,環(huán)形激光陀螺、干涉型光纖陀螺和MEMS陀螺等固態(tài)陀螺儀逐漸成熟。受制造工藝和專用集成電路水平的制約,目前國(guó)產(chǎn)陀螺儀的精度不高,總體上和以美國(guó)為代表的世界先進(jìn)水平有一定的差距。近幾十年,國(guó)內(nèi)的一些高校和科研單位基于不同種類的陀螺儀自主研制了多種SINS,如激光陀螺SINS、光纖陀螺SINS和MEMS陀螺SINS等,已經(jīng)被陸續(xù)應(yīng)用于陸海空等領(lǐng)域。就全球發(fā)展現(xiàn)狀而言,現(xiàn)有慣性測(cè)量元件不足以滿足當(dāng)前各種不同導(dǎo)航任務(wù)的指標(biāo)要求,未來(lái)的主要目標(biāo)是提高精確性、連續(xù)性和可靠性,降低器件的成本及功耗等。
慣性傳感器元件的定常誤差模型難以建立,提高導(dǎo)航精度十分困難。針對(duì)這個(gè)問(wèn)題,Huang等[34-35]根據(jù)不同的誤差模型設(shè)計(jì)合適的濾波器,將多模型方法與EKF相結(jié)合,給出狀態(tài)的最優(yōu)估計(jì)。同時(shí)利用具有高精度預(yù)測(cè)優(yōu)勢(shì)的融和Adams的多模型擴(kuò)展卡爾曼濾波算法(multi-model EKF fusing Adams explicit formula algorithm,MEKFA),使姿態(tài)估計(jì)精度得到較大的提高。理論分析證明了該算法的收斂性和穩(wěn)定性,并通過(guò)“海翔”號(hào)水下滑翔機(jī)湖泊試驗(yàn)進(jìn)行了驗(yàn)證。結(jié)果表明,MEKFA方法與單EKF和乘性擴(kuò)展卡爾曼濾波(multiplicative EKF,MEKF)相比,姿態(tài)估計(jì)性能有顯著提高。
Kim等[37]結(jié)合平均海流速度模型,實(shí)現(xiàn)了INS對(duì)海流速度的測(cè)量。經(jīng)過(guò)計(jì)算,受海流影響的加速度增量是INS中加速度計(jì)測(cè)量精度的1/10,加速度計(jì)無(wú)法直接感覺(jué)到海流的影響,這些微弱的海流效應(yīng)將完全被傳感器噪聲和外部干擾所阻斷。然而,海流對(duì)滑翔路徑的影響是在若干小時(shí)的滑翔中累積起來(lái)的。通過(guò)將滑翔機(jī)內(nèi)置的INS輸出數(shù)據(jù)與平均海流速度模型的先驗(yàn)信息結(jié)合,校正海流加速度測(cè)量,完成加速度計(jì)偏差的誤差修正就能夠獲得水下滑翔機(jī)位置估計(jì)。對(duì)于沒(méi)有海流信息的情況,仍然可以根據(jù)每次滑翔結(jié)束后測(cè)量到的位置誤差估計(jì)海流數(shù)據(jù),再遞歸反饋到平均海流模型中,從而提高定位精度。
姿態(tài)位置信息的測(cè)量精度還取決于數(shù)據(jù)融合算法,傳統(tǒng)的捷聯(lián)式慣性導(dǎo)航的姿態(tài)算法在復(fù)雜動(dòng)態(tài)環(huán)境下,常常不能滿足目前的精度要求,需要尋求更高精度的算法。位姿估計(jì)的算法中最常用的是KF算法,其廣泛適用于線性狀態(tài)空間模型,但該方法要求系統(tǒng)方程線性且系統(tǒng)模型精確,并不適用于非線性系統(tǒng)。有學(xué)者提出用統(tǒng)計(jì)算法來(lái)估計(jì)非線性狀態(tài)空間模型,Durbin等[38]基于推算近似線性模型提出了迭代結(jié)構(gòu),這些線性模型的似然估計(jì)能匹配潛在非線性模型的對(duì)數(shù)似然函數(shù),在線性估計(jì)模型的基礎(chǔ)上提出重要性抽樣方案,但此方法需要計(jì)算Jacobian矩陣,計(jì)算量較大,實(shí)際應(yīng)用中具有一定的局限性。文獻(xiàn)[39]~[42]中提出的魯棒濾波器和KF相比不需要噪聲的統(tǒng)計(jì)假設(shè),當(dāng)系統(tǒng)中存在不確定模型時(shí),該濾波器因具有較強(qiáng)的魯棒性而得到廣泛應(yīng)用。即使出現(xiàn)模型不確定,H2濾波器也能確保在H2范數(shù)中噪聲信號(hào)與濾波誤差之間存在邊界,但要求噪聲是高斯白噪聲信號(hào)。濾波器通過(guò)優(yōu)化對(duì)所研究對(duì)象的某些閉環(huán)性能使范數(shù)達(dá)到最優(yōu)的濾波效果。為保證濾波器不僅有收斂的估計(jì)誤差而且有較滿意的動(dòng)態(tài)性能,Cao等[43]提出了混合濾波器。
2.3聲學(xué)導(dǎo)航技術(shù)
聲學(xué)導(dǎo)航主要是利用固定或移動(dòng)聲學(xué)信標(biāo)通過(guò)水聲通信來(lái)完成水下導(dǎo)航。Techy[44]和Van Uffelen等[45]中提出一種應(yīng)用于Seaglider水下滑翔機(jī)的LBL聲學(xué)導(dǎo)航系統(tǒng)。該系統(tǒng)由3個(gè)位于水面并配備有GPS導(dǎo)航模塊的移動(dòng)聲學(xué)信標(biāo)作為參考,通過(guò)測(cè)量聲波往返行程的時(shí)間,再利用EKF算法將水下滑翔機(jī)的運(yùn)動(dòng)狀態(tài)融入到估計(jì)算法中,得出簡(jiǎn)單的幾何定位估計(jì)值,通過(guò)仿真和試驗(yàn)驗(yàn)證了此聲學(xué)系統(tǒng)在具有多徑效應(yīng)和強(qiáng)海流的淺海環(huán)境下,能夠有效提供高精度的定位估計(jì)。2010~2011年初,Van Uffelen等[46-47]在菲律賓海域部署了4架Seaglider水下滑翔機(jī),利用水下滑翔機(jī)接收到聲波時(shí)刻與預(yù)測(cè)值之間的傳輸時(shí)間偏移量來(lái)估計(jì)距離的誤差值,從而提高滑翔機(jī)在水下收集數(shù)據(jù)時(shí)的定位估計(jì),驗(yàn)證了滑翔機(jī)作為傳感器搭載平臺(tái)的實(shí)用性。整個(gè)工作過(guò)程記錄了滑翔機(jī)超過(guò)2 000次的水聲數(shù)據(jù)傳輸,距離系泊聲源最遠(yuǎn)達(dá)到700 km。與以上方案不同,Sun等[48]提出以聲學(xué)信標(biāo)為環(huán)境特征,根據(jù)海底信標(biāo)到滑翔機(jī)的距離來(lái)估計(jì)滑翔機(jī)的位置,實(shí)現(xiàn)水下滑翔機(jī)在三維空間的導(dǎo)航定位的導(dǎo)航方法。基于EKF-SLAM(simultaneous localization and mappi-ng)算法,在信標(biāo)位置未知情況下,能夠同步估計(jì)滑翔機(jī)和信標(biāo)的位置。這種算法的優(yōu)勢(shì)在于將滑翔機(jī)的速度估計(jì)納入導(dǎo)航定位系統(tǒng)中,進(jìn)一步降低了導(dǎo)航定位誤差。
Woithe等[49]探討了利用DVL來(lái)改善Slocum電能滑翔機(jī)航位推算算法中位置估計(jì)方法的可行性,提出通過(guò)安裝DVL的輔助航位推算導(dǎo)航算法,并在新澤西海岸進(jìn)行為期12天的滑翔機(jī)部署,初步顯示了良好的試驗(yàn)效果。
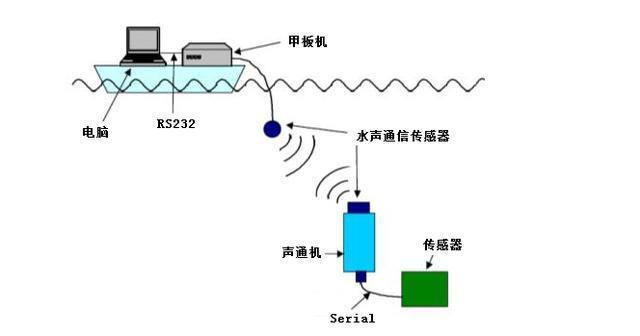
硬件方面,低功耗聲學(xué)調(diào)制解調(diào)器是聲學(xué)導(dǎo)航的核心器件。美國(guó)Teledyne Benthos公司為美海軍Seaweb海底網(wǎng)絡(luò)開(kāi)發(fā)了一種名為T(mén)elesonar的聲學(xué)調(diào)制解調(diào)器。Teledyne Webb提供的Sloc-um滑翔機(jī)和Teledyne Benthos提供的調(diào)制解調(diào)器組合形成的導(dǎo)航定位和數(shù)據(jù)傳輸網(wǎng)絡(luò)見(jiàn)下圖。
水下滑翔機(jī)/聲學(xué)調(diào)制解調(diào)器數(shù)據(jù)傳輸示意圖
2.4組合導(dǎo)航技術(shù)
2.4.1 GPS/SINS/DVL組合導(dǎo)航
SINS結(jié)合DVL是目前水下組合導(dǎo)航中比較常用的方法,并在多種水下航行器中得到廣泛應(yīng)用[51-53]。季龍[54]和黃海洋[55]先后對(duì)在水下滑翔機(jī)上搭建低成本、高精度的GPS/SINS組合導(dǎo)航系統(tǒng)進(jìn)行了探索。在水面上時(shí),使用GPS提供整機(jī)系統(tǒng)需要的位置坐標(biāo)信息。在水下運(yùn)動(dòng)時(shí),由電子羅盤(pán)或SINS和深度傳感器相結(jié)合獲取滑翔機(jī)的姿態(tài)信息,再通過(guò)卡爾曼濾波進(jìn)行數(shù)據(jù)融合實(shí)現(xiàn)水下的位置解算。李輝[56]提出了一種水下滑翔機(jī)的水面/水下導(dǎo)航定位算法:在水面上通過(guò)GPS獲取位置,在水下利用姿態(tài)航向參考系統(tǒng)提供信息,再利用EKF方法進(jìn)行導(dǎo)航信息融合,最后利用MATLAB軟件進(jìn)行算法仿真,結(jié)果符合預(yù)期。對(duì)于水下滑翔機(jī)編隊(duì)的協(xié)同導(dǎo)航算法,Paley[57]和Tang等[58]提出了自適應(yīng)EKF,通過(guò)聲學(xué)廣播的方式,解決了水下滑翔機(jī)的編隊(duì)協(xié)作組網(wǎng)導(dǎo)航定位問(wèn)題。Huang等[59]基于慣性導(dǎo)航和航位推算的組合導(dǎo)航,提出一種分裂基快速傅里葉變換和UKF的混合算法。分裂基快速傅里葉變換是將radix-2和radix-4快速傅里葉變換的優(yōu)點(diǎn)結(jié)合起來(lái)的一種方法[60],計(jì)算量較小,擁有較大的漸進(jìn)復(fù)雜度。試驗(yàn)結(jié)果表明,該算法在估計(jì)精度和計(jì)算成本方面具有較好的優(yōu)勢(shì)。周吉雄[61]將UKF與聯(lián)邦卡爾曼濾波(federated Kalman filtering,F(xiàn)KF)技術(shù)集合起來(lái),通過(guò)仿真驗(yàn)證了這種基于局部反饋校正的UKF在組合導(dǎo)航系統(tǒng)中具有較高的精度和魯棒性。呂志剛[62]提出一種SINS/GPS和DVL組合導(dǎo)航的方法,為自主式水下航行器(autonomous underwater vehicle,AUV)平臺(tái)提供高精度的連續(xù)導(dǎo)航信息,并對(duì)此組合導(dǎo)航系統(tǒng)的標(biāo)定方法和誤差分析進(jìn)行了系統(tǒng)性的研究。針對(duì)SINS/DVL組合導(dǎo)航問(wèn)題,Xu等[63]以導(dǎo)航需求為導(dǎo)向,設(shè)計(jì)基于改進(jìn)Sage-Husa自適應(yīng)卡爾曼濾波算法的導(dǎo)航系統(tǒng),仿真結(jié)果表明,該系統(tǒng)具有較高的容錯(cuò)性。
2.4.2海洋地球物理輔助慣性導(dǎo)航技術(shù)
1)地磁輔助導(dǎo)航
20世紀(jì)70年代,美國(guó)就已經(jīng)完成了全球磁力矢量分布圖的測(cè)繪,并研制出了適用于AUV平臺(tái)的地磁定位系統(tǒng)。美國(guó)西屋電器公司提出了利用己知靜止磁異常對(duì)水下航行器進(jìn)行導(dǎo)航的方法[64];美國(guó)雷神公司提出了利用磁場(chǎng)進(jìn)行水下導(dǎo)航定位的方法,并進(jìn)行了試驗(yàn)驗(yàn)證[65]。2009年,Kato[66]提出了基于地磁圖和等深線圖的AUV導(dǎo)航定位算法,并采用相關(guān)海域的地磁場(chǎng)數(shù)據(jù)和水深數(shù)據(jù)進(jìn)行了仿真試驗(yàn)。NASA Goddard空間中心對(duì)水下地磁導(dǎo)航進(jìn)行了研究,并進(jìn)行了大量的試驗(yàn)[67]。
在國(guó)內(nèi),余樂(lè)[68]以提高地磁匹配導(dǎo)航系統(tǒng)航跡規(guī)劃效率和精度為目的,對(duì)航跡規(guī)劃算法和地磁適配區(qū)選擇原則進(jìn)行了理論研究和仿真驗(yàn)證。Lin[69]對(duì)水下地磁導(dǎo)航進(jìn)行了研究,在渤海海域進(jìn)行了地磁測(cè)量與水下地磁輔助導(dǎo)航試驗(yàn),取得了400 m左右的精度。國(guó)防科學(xué)技術(shù)大學(xué)科研人員[70-72]成功研制出慣性/地磁匹配組合導(dǎo)航系統(tǒng)樣機(jī),并分別于2008年、2009年、2011年進(jìn)行了岸基車載試驗(yàn)、水面船試驗(yàn)和水下試驗(yàn),驗(yàn)證了地磁/慣性組合導(dǎo)航系統(tǒng)的可行性。劉明雍等[73]提出受地磁異常影響的水下航行器導(dǎo)航方法,將最近點(diǎn)迭代算法運(yùn)用到水下地磁匹配導(dǎo)航中,通過(guò)多次迭代匹配來(lái)減小慣性導(dǎo)航的累積誤差。
2)地形輔助導(dǎo)航
在全球衛(wèi)星導(dǎo)航出現(xiàn)之前,洲際巡航導(dǎo)彈的遠(yuǎn)程導(dǎo)航系統(tǒng)是利用高度計(jì)數(shù)據(jù)與預(yù)先存儲(chǔ)地圖的地面高程進(jìn)行比較,從而實(shí)現(xiàn)精確長(zhǎng)期的定位估計(jì)。定位精度取決于地形圖的分辨率和測(cè)量高程的精度。在建立GPS之后,這個(gè)系統(tǒng)顯得多余,但其在GPS定位失效時(shí)仍能發(fā)揮作用。由此,利用地形信息進(jìn)行水下導(dǎo)航也是可行的,但由于水深圖分辨率較低,限制了其在水下航行器中的使用。
在國(guó)外,Stuntz等[74]研究了在沿海地區(qū)精確定位滑翔機(jī)軌跡所需的最小數(shù)據(jù)集,分析了地形跟蹤算法的定位性能,首先對(duì)壓力傳感器和高度計(jì)的采集數(shù)據(jù)進(jìn)行平滑處理以消除噪聲,然后將其與局部測(cè)深值進(jìn)行比較,從而生成位置修正值。在加州沿海進(jìn)行的Slocum滑翔機(jī)的試驗(yàn)結(jié)果表明,地形輔助慣性導(dǎo)航方法比單獨(dú)使用慣性導(dǎo)航更加精確。
通過(guò)其他的地球物理參數(shù),如采用地球磁場(chǎng)和地球重力場(chǎng)來(lái)增強(qiáng)地形輔助算法,以提高其魯棒性的研究也被提出,但是這些試驗(yàn)的效果還未得到充分證明[75]。
3冰下導(dǎo)航技術(shù)發(fā)展方向
冰下任務(wù)提供了非常有價(jià)值的科學(xué)信息。自20世紀(jì)70年代,F(xiàn)rancois和Nodland在北冰洋邊緣的波弗特海部署無(wú)人水下航行器時(shí)起,許多AUV都陸續(xù)開(kāi)展了冰下觀測(cè)。在冰層覆蓋地區(qū)持續(xù)觀測(cè)對(duì)氣候變化研究和極地勘探工作尤為重要。在冰下,衛(wèi)星導(dǎo)航系統(tǒng)失效,水下滑翔機(jī)的導(dǎo)航與定位尤其困難,慣性導(dǎo)航失去定時(shí)校準(zhǔn)條件,在現(xiàn)有水下導(dǎo)航方法中,只有聲學(xué)導(dǎo)航和地球物理導(dǎo)航方法能夠在冰下為滑翔機(jī)提供有限的定位估計(jì)。
3.1冰下聲學(xué)導(dǎo)航
利用聲學(xué)設(shè)備進(jìn)行導(dǎo)航的水下無(wú)人航行器,多依賴于固定的聲源進(jìn)行機(jī)載導(dǎo)航或在船上和陸地上來(lái)進(jìn)行位置估計(jì)。Rossby等[76]為Seaglider開(kāi)發(fā)了適用于冰下環(huán)境的聲學(xué)導(dǎo)航系統(tǒng),并于2006~2014年在戴維斯海峽部署了14架次滑翔機(jī),對(duì)六自由度EKF后處理導(dǎo)航結(jié)果進(jìn)行了驗(yàn)證。試驗(yàn)中的定位信息是由系泊在固定位置的RAFOS浮標(biāo)[76]搭載的聲學(xué)導(dǎo)航源提供的。美國(guó)海軍研究辦公室(office of naval research,ONR)邊緣冰區(qū)(marginal ice zone,MIZ)項(xiàng)目開(kāi)發(fā)的實(shí)時(shí)聲學(xué)導(dǎo)航系統(tǒng)在南極洲對(duì)Slocum水下滑翔機(jī)的冰下聲學(xué)導(dǎo)航定位能力進(jìn)行了驗(yàn)證[77]。
最常用的冰下聲學(xué)導(dǎo)航策略是LBL系統(tǒng)導(dǎo)航和USBL導(dǎo)航相結(jié)合的導(dǎo)航策略[78-79]。另外,還有一些LBL的新應(yīng)用[80]以及基于視覺(jué)的用于超短距離的歸航算法。Hugin[81]和Theseus[82]等水下機(jī)器人使用單信標(biāo)導(dǎo)航來(lái)擴(kuò)展它們的LBL系統(tǒng)。此外,Gavia水下航行器[83]創(chuàng)新地向上安裝DVL來(lái)測(cè)量航行器相對(duì)于冰層的速度,以實(shí)現(xiàn)水下導(dǎo)航。
由于導(dǎo)航源不能穿越冰層預(yù)先部署在海底,只能部署在冰面上,所以,當(dāng)探測(cè)區(qū)域的冰層漂移時(shí),導(dǎo)航源不能對(duì)滑翔機(jī)提供精確實(shí)時(shí)的定位信息。聲學(xué)導(dǎo)航源需同時(shí)傳輸它們所在的位置。隨時(shí)間傳輸導(dǎo)航源位置信息的概念并不新鮮,GPS信號(hào)和低速率遙測(cè)數(shù)據(jù)已經(jīng)被用于小型水下移動(dòng)導(dǎo)航網(wǎng)絡(luò)[84-86]。華盛頓大學(xué)在北極的試驗(yàn)中首次使用這種方法搭建了完整的導(dǎo)航系統(tǒng)[87],但由于導(dǎo)航源和水下滑翔機(jī)之間的通信過(guò)程產(chǎn)生的時(shí)鐘漂移將導(dǎo)致距離測(cè)量存在一定誤差。
3.2冰下地形輔助導(dǎo)航
美國(guó)伍茲霍爾海洋研究所[88]對(duì)水下滑翔機(jī)在冰下的地形輔助導(dǎo)航方法進(jìn)行了系統(tǒng)的研究,評(píng)估了可用于水下滑翔機(jī)在經(jīng)歷季節(jié)性海冰海洋中全年使用的可行性。該試驗(yàn)基于Slocum 200 m水下滑翔機(jī),結(jié)合深度和海流估計(jì)的水深模型[89],使用單波束高度計(jì)和航位推算方法進(jìn)行導(dǎo)航信息更新。試驗(yàn)結(jié)果十分樂(lè)觀,但對(duì)算法使用地區(qū)具有局限性。
紐芬蘭紀(jì)念大學(xué)的Claus等[90]通過(guò)一種離線試驗(yàn)方案,將在線定位估計(jì)方法分別與常規(guī)航位推算方法、包含GPS校正的航位推算方法以及離線地形輔助的定位估計(jì)方法進(jìn)行比較,驗(yàn)證了水下滑翔機(jī)平臺(tái)基于抖動(dòng)自舉粒子濾波器的地形輔助導(dǎo)航算法的準(zhǔn)確性。這種方法被應(yīng)用在冰下進(jìn)行持久的導(dǎo)航定位測(cè)量。在紐芬蘭赫里路德冰川峽灣,科研人員分別在2010年和2012年對(duì)水下滑翔機(jī)進(jìn)行了距離為12 km和91 km的室外導(dǎo)航試驗(yàn),試驗(yàn)結(jié)果表明,該算法能夠在2次試驗(yàn)中分別保持33 m和50 m的誤差。2014年6月10日~11日在加拿大紐芬蘭省的康賽普申海灣,進(jìn)行了水下滑翔機(jī)地形輔助導(dǎo)航的進(jìn)一步測(cè)試,在由10 km和90 km直線段的2組離線試驗(yàn)中,該方法的誤差分別為25 m和50 m,驗(yàn)證了冰下導(dǎo)航算法在淺海地區(qū)的有效性。但這些試驗(yàn)還存在以下問(wèn)題:1)水下滑翔機(jī)的定位坐標(biāo)系位于磁北,而地形輔助導(dǎo)航處理器坐標(biāo)位于真北,導(dǎo)致相對(duì)于滑翔機(jī)坐標(biāo)系存在一定的磁偏角誤差;2)試驗(yàn)海域較淺,水下滑翔機(jī)仍能接收到GPS的定位信息,這些信息會(huì)將地形輔助算法的初始值重新復(fù)位,因此不能驗(yàn)證水下滑翔機(jī)在較深海域進(jìn)行長(zhǎng)時(shí)間持續(xù)導(dǎo)航情況下該算法的有效性。
5結(jié)束語(yǔ)
水下滑翔機(jī)作為探索海洋、執(zhí)行水下任務(wù)的重要工具,在我國(guó)海洋資源勘探與開(kāi)發(fā)方面具有重要作用。高精度、高可靠性的導(dǎo)航系統(tǒng)是水下滑翔機(jī)成功完成任務(wù)并安全返航的保證之一。文中對(duì)水下滑翔機(jī)平臺(tái)常見(jiàn)導(dǎo)航系統(tǒng)的原理、分類與關(guān)鍵技術(shù)進(jìn)行了說(shuō)明,最后對(duì)水下滑翔機(jī)冰下導(dǎo)航發(fā)展情況進(jìn)行了展望。
隨著水下滑翔機(jī)工作范圍向邊遠(yuǎn)海域逐步擴(kuò)大,水下導(dǎo)航技術(shù)也將面臨更多未知的挑戰(zhàn)。為搭建水下滑翔機(jī)海洋網(wǎng)絡(luò),實(shí)現(xiàn)海洋信息實(shí)時(shí)交互傳遞,未來(lái),水下滑翔機(jī)導(dǎo)航技術(shù)將向著高精度、強(qiáng)魯棒性、實(shí)時(shí)性及協(xié)同組網(wǎng)等方向發(fā)展。并以慣性導(dǎo)航技術(shù)為主,多種導(dǎo)航技術(shù)為輔,實(shí)現(xiàn)多種導(dǎo)航傳感器,多種導(dǎo)航方式的組合導(dǎo)航,進(jìn)一步提高水下導(dǎo)航技術(shù)的準(zhǔn)確性、靈活性與可靠性,構(gòu)建智能化的組合導(dǎo)航方式,不斷提高水下滑翔機(jī)的海洋觀測(cè)能力。
-
導(dǎo)航
+關(guān)注
關(guān)注
7文章
532瀏覽量
42471 -
無(wú)人機(jī)
+關(guān)注
關(guān)注
230文章
10486瀏覽量
181351 -
水下滑翔機(jī)
+關(guān)注
關(guān)注
0文章
5瀏覽量
1796
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
基于PC的水下作業(yè)控制系統(tǒng)的研究
基于模糊推理水下作業(yè)系統(tǒng)運(yùn)動(dòng)控制研究
南方電網(wǎng)水下機(jī)器人項(xiàng)目完成驗(yàn)收,可保障電網(wǎng)的安全可靠運(yùn)行
水下機(jī)器人:百花齊放從科考利器到娛樂(lè)新品
遙控機(jī)器人在深水A油田臥式采油樹(shù)作業(yè)中的應(yīng)用資料說(shuō)明

水下機(jī)器人將引來(lái)新發(fā)展 “新基建”將賦能水下機(jī)器人?
IT7600助力水下機(jī)器人作業(yè)
水下作業(yè)需求增大,加快我國(guó)水下機(jī)器人產(chǎn)業(yè)化、規(guī)模化進(jìn)程
挪威或?qū)㈤_(kāi)發(fā)用于恢復(fù)海底管道的水下3D打印技術(shù)
水下航行器水下高度、航向和姿態(tài)測(cè)量方案的介紹
ROV水下作業(yè)仿真平臺(tái):龔嘴水電站壩體檢測(cè)和清理作業(yè)仿真
國(guó)產(chǎn)水聲功率放大器ATA-L50在水下通信領(lǐng)域中的應(yīng)用
水下測(cè)距傳感器:泳池清潔機(jī)器人精準(zhǔn)定位的必備智能感知“神器”






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論