 精準時空技術的進步,對IoT的發展又意味著什么?
精準時空技術的進步,對IoT的發展又意味著什么?
IoT 時代,定位是實現萬物互聯的重要基礎,在一些重要的 IoT 場景下,精準時空技術如何與 IoT 結合?GNSS 定位經過技術發展,如何實現定位從 10 米到亞米級甚至厘米級的跨越?精準時空技術的進步,對 IoT 的發展又意味著什么?
從互聯網到移動互聯網再到 IoT,網絡技術的發展其實是解決從人與人的連接到人與物的連接,最終到物與物連接的過程。IoT 并不是一個新的行業,而是多行業融合形成的產業,從產業鏈角度自下而上來看,IoT 被分為 4 個層次:感知層 (芯片 / 傳感器)、網絡層 (芯片 / 通信模組 / 通信網絡)、平臺層 (平臺 / 操作系統) 和應用層 (智能終端 / 集成應用)。
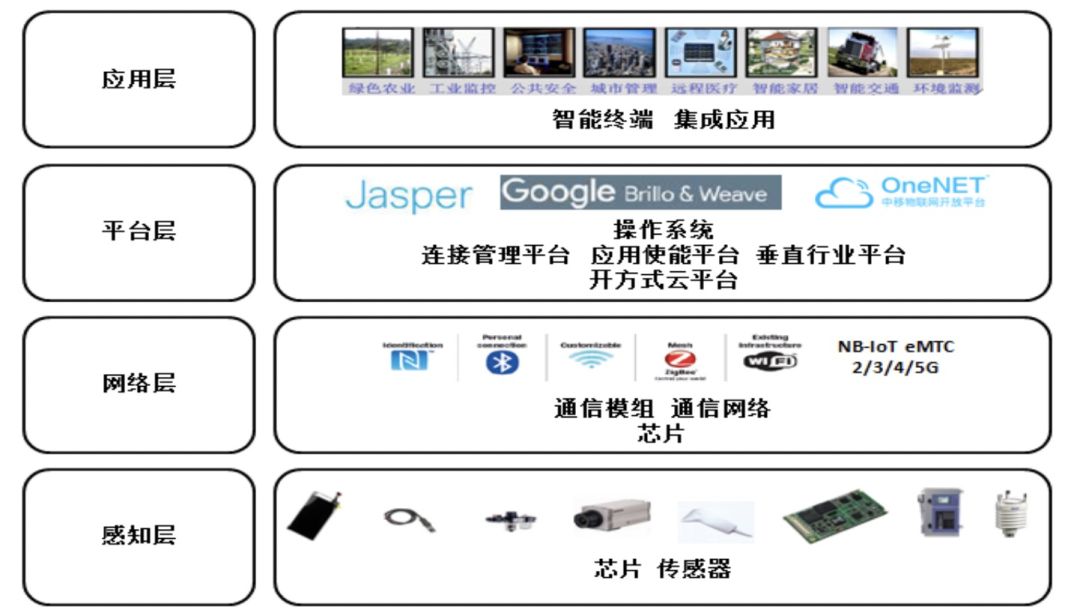
在今天,5G、數據、精準時空都被認為是 IoT 時代的基礎設施,5G 是網絡層的基礎設施:在網絡傳輸層面讓實時傳輸的速度變得更快更穩定;數據是平臺層的基礎設施:數據層面,包括 AI、云計算、大數據在內的技術讓信息處理能力快速提升;而精準時空定位其實是聚焦于 IoT 感知層的基礎設施:涉及到芯片和傳感器的應用,讓位置定位更實時更精準。很多人對精準時空定位是既熟悉又陌生的,可能聽過 GPS、北斗,但是對精準時空的概念、 GNSS 是什么以及背后的定位原理不甚了解。
IoT 時代,隨著定位高精準化及定制化需求的出現,精準時空服務中的基礎設施和高精度定位方案,將是打通從空間維度“物與物交流”的新一代科技及經濟增長點,在解決各類終端設備的硬件適配和系統通用性問題后,精準時空服務技術將使得未來消費終端的更新換代以幾何式增長。
在 IoT 產業鏈環節中,高精度 GNSS 技術代表的精準時空服務無處不在:芯片、傳感器、智能終端、以及精準時空能力開放平臺,它投射在生產生活中的方方面面,對 IoT 的重要性不言而喻。那么,到底高精度 GNSS 技術如何解決 IoT 場景下的時空定位問題呢?
1 說了半天,高精度 GNSS 定位是什么
在精準時空的概念里,高精度 GNSS 定位是確保時空定位精準的技術手段。GNSS 是指具有全球導航定位能力的衛星定位導航系統,目前包括四大導航系統北斗、GPS、伽利略、格洛納斯。GNSS 無處不在,對 C 端用戶來說,我們日常的手機地圖定位、車載導航、智能手表定位都是精準時空能力的體現;對于 B 端企業來說,則在芯片、傳感器等硬件制造以及軟件、算法能力方向進行布局。
據中信建投證券通信組統計,2018 年,全球傳感器市場主要由海外公司主導,如 TI、ST、博世、飛思卡爾等,我國傳感器企業與海外仍有較大差距,國內約 70% 的份額被外資企業占據。中國精準時空技術的基礎夯實,是保證在 IoT 時代占領制高點的重要一環。
目前,高精度 GNSS 定位在以下 IoT 場景都得以了應用:
自動駕駛領域,包含車路協同、高速公路自動巡航、自主代客泊車等;
大眾消費領域,解決智能設備如兒童手表、手機等的智能化、互聯化;
公共服務領域,城市運轉中公共交通系統的監測控制、共享設備的定位、地質災害自動化監測等;
產業升級,滿足農業無人機播種植保、森林精細業、地質測量工程、新能源等多行業定位方向需求;
未來智慧城市,為“未來之城”提供精準時空信息保障。
…………
IoT 的應用場景往往具有垂直行業屬性,在以上領域,負責國家北斗地基增強系統“全國一張網”建設的千尋位置,已經讓北斗高精度定位技術都有了落地的案例。
高精度定位在行業應用中想象空間有多大?一二線城市的居民對共享單車、共享汽車一定不陌生,下載 APP 就可以查到“離我最近的一輛車的位置以及距離”,共享汽車可以利用北斗高精度定位 + 慣性導航融合,結合車輛地理圍欄,實現精準用車、還車;在大眾消費領域,智能手機是北斗系統最典型的應用,2019 年第一季度數據,在國內超過 70% 的手機都支持北斗定位系統;在農業植保場景中,大疆無人機搭配北斗精準定位技術,將定位精度提升至厘米級,讓航線軌跡精確可重復。而“未來之城”還是美好的愿景,需要先滿足“城中各物”的精準定位,才能實現智慧城市中的萬物互聯……精準時空為 IoT 多種場景賦能,高精度 GNSS 定位成為了跨越多行業、多場景的應用。未來,擁有時空坐標的萬物數據才是指導 IoT 發展的方向標。
2 高精度 GNSS 定位的基本原理
那么,高精度 GNSS 定位到底是如何解決 IoT 場景的定位問題的呢?
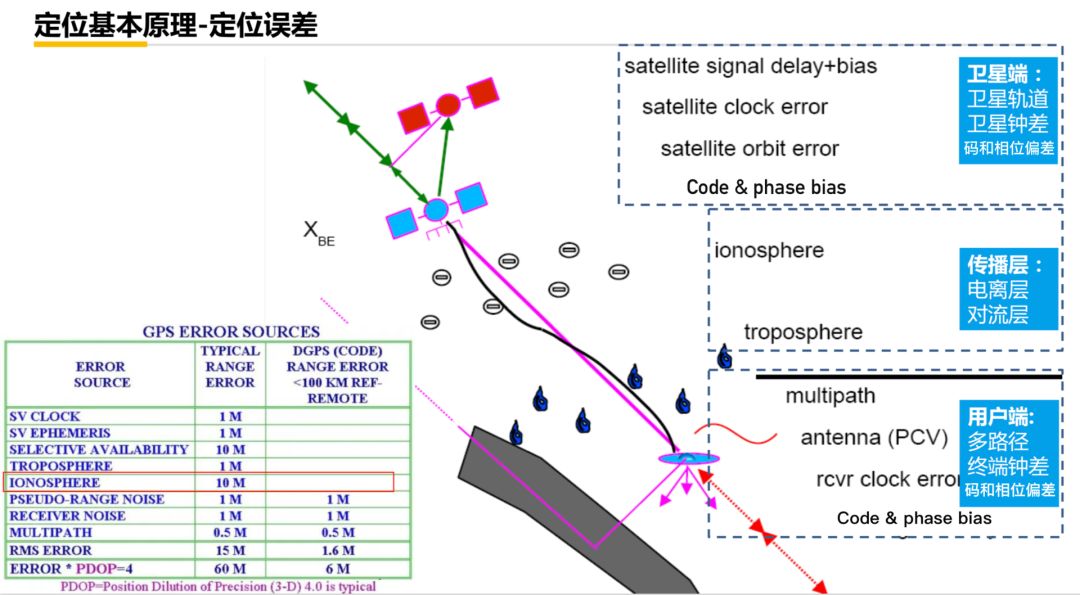
首先,這與衛星定位的原理相關:衛星定位中至少需要 4 顆衛星完成三維空間內的定位,想要知道地面某一點的精確三維位置(x、y、z),需要三顆衛星基礎定位,但是由于用戶接受機使用的時鐘與衛星星載時鐘不可能總是同步,所以除了用戶的三維坐標 x、y、z 外,還要引進一個時間 t 即衛星與接收機之間的時間差作為未知數來求解,這就需要第四顆進行修正,收到越多的衛星信號,解算的速度和精度也會越好。
即使有了四顆衛星進行定位,在衛星端、傳播層、用戶端還會有誤差產生,這樣的誤差在 IoT 一些要求精準位置場景中是不能滿足需求的,普通定位還需往高精度 GNSS 定位的方向發展。
如何消除各種誤差的影響呢?網絡 RTK、SSR 服務技術前來助陣:
網絡 RTK 差分服務技術
RTK( Real-time kinematic)指的是實時動態測量,也叫載波相位差分定位,是 GNSS 相對定位技術的一種,主要通過基準站和流動站(接收機位置)之間的實時數據鏈路和載波相對定位快速解算技術,實現高精度動態相對定位。
具體實現方法就是,在地面設置固定的基準站(要保證位置精準標定),用來接收衛星信號,通過兩種方式為用戶提供差分服務,一種是用已知的基準站位置解算所收到信號中的誤差,誤差通過網絡播發的形式傳輸給附近的用戶接收機,由于參考站和接收機端的誤差存在時間和空間上的相關性,在接收機端減掉誤差后,得到的就是一個高精度位置信息了。另一種方法是將基準站接收機收到的觀測量直接發送給用戶,用戶端通過“求差”的方式消除或減少誤差的影響。這就是高精度 GNSS 定位技術的基本原理。第二種方法的效果較好,所以被廣泛采用。
在解決誤差問題上,千尋位置提出并建設了基于網絡傳輸的衛星導航差分增強系統,其中就包含 RTK 載波相位差分服務技術。目前單獨使用北斗定位精度為 10 米,而通過北斗地基一張網的增強服務,能夠實現實時動態亞米級、分米級、厘米級,靜態毫米級高精度定位。
廣域差分服務技術
利用大范圍分布的參考站解算導航衛星軌道和衛星鐘的誤差、信號偏差、廣域電離層效應,這種校準數的表述方式稱為 SSR (State Space Representation), 即狀態空間表述。過去通常采用通信衛星播發校準數, 所以實際系統被稱作星基增強系統(SBAS:Satellite-based Augmentation System),現在 SSR 校準數也通過互聯網播發。千尋位置使用全球分布的參考站和北斗地基一張網提供高精度 SSR 服務,增加了區域電離層和對流層校準數,通過通信衛星和互聯網兩個鏈路實時播發給用戶。用戶端結合 PPP-RTK 可以快速達到厘米級定位精度。
3 以自動駕駛為例,高精度 GNSS 定位如何發揮作用
精準時空為 IoT 多種場景賦能,在自動駕駛領域的應用也被討論得尤為火熱。自動駕駛可以說是在 IoT 體系中能讓大眾較清晰看到落地場景的應用,也是高精度 GNSS 定位技術非常重要的應用場景。
業界根據智能程度將自動駕駛分為 5 級,常被提及的駕駛輔助、自動駕駛、無人駕駛其實代表了自動駕駛的不同程度的智能化。高精度 GNSS 定位更多是賦能 L2 以上的自動駕駛,讓系統獲取高精度的絕對位置。
(SAE 國際自動機工程師學會自動駕駛等級劃分標準)
自動駕駛中定位技術的瓶頸
1、定位系統的可用性問題(各種傳感器失效造成的用戶體驗差);
2、L3 級以上自動駕駛系統的安全問題;
3、由傳感器性能要求升級帶來的系統成本增加問題。
隨著自動駕駛的智能程度不斷上升,在 L1-L5 不同階段,定位的要求層層遞進,定位距離從 10 米到亞米級、甚至 L3 級以上要求厘米級。而高精度定位是通過各種定位傳感器實現的,定位傳感器構成了整個車輛的感知系統,在選擇上,不同場景下不同的傳感器各有優劣,往往不能兼顧全面的需求。而在系統中引入高精度的衛星定位與各種傳感器做融合,各自覆蓋各自專長的工作場景,互為冗余備份,可以大大提高系統的可用性與安全性,并且由于各傳感器各司其職,也能夠一定程度上起到降低系統整體成本的作用。
高精度 GNSS 定位如何突破在自動駕駛中的瓶頸
相較于其他傳感器,GNSS 成本低、絕對位置精度高的優勢在大部分自動駕駛場景及量產落地的需求下是大勢所趨。
在傳感器的選擇上,GNSS 可以和其他傳感器的搭配以解決對于絕對定位場景和相對定位場景下的不同自動駕駛需求。業界在車載導航應用方向上,常使用 GNSS 定位 + 慣性導航融合的方法。GNSS 定位能得到車輛所處的經緯度信息和當前的姿態信息,但是在普通 GNSS 定位中常產生信號丟失的問題,慣性導航則能夠在信號丟失情況下可持續維持準確方向及位置,所以經常結合使用,完成車輛的精準定位。
賦能自動駕駛需要五個時空基準必要因素:GNSS 衛星、高精度地圖、全疆域通訊網絡覆蓋、全疆域統一基準的 GNSS 基站、性能良好的移動端 GNSS 接收機,5 者合力保證自動駕駛安全。其中高精度地圖的作用在于讓車“記住路線”,當 GNSS 定位在復雜場景下暫時失去對空間位置的感知,車輛憑借實時感知及記憶數據保證能正常行走。現在的高精度定位一般都是通過 RTK 技術來獲取的,為了與高精度地圖信息進行匹配,必須要做到時空基準的統一。
有了高精度 GNSS 定位技術,對現實場景中車的絕對定位、地圖的糾偏、測試相對位置準確度的三大方向也就有了解決方案。高精度地圖現階段是通過后處理為地圖進行糾偏,對于基礎地面標識的精準測量,對自動駕駛場景中的車來說是最好的對比標準。此外,高精度 GNSS 定位加高精度地圖,也能實現很多智能駕駛輔助方面的功能,比如提醒司機前方有急轉彎道、坡道、交叉路口,還有一些已知的事故點,帶來更好的駕駛體驗;另外,作為基準評估相對位置的準確度已經普遍用于 L1、L2 級別的功能實踐。
高精度 GNSS 定位在自動駕駛中的案例
1、高精度 GNSS 與車路協同(V2X)
車路協同中一個最基礎也是最關鍵的技術就是高精度 GNSS 定位技術,車端、路端是車聯網場景下需要連接的兩端,對汽車及路面基礎設施的組合定位服務是必須要解決的問題。
在車路協同這一場景下,千尋位置構建了一套解決方案以應對厘米級定位問題。
(千尋位置車路協同(V2X)高精度定位方案架構)
通過差分服務技術解決定位誤差問題后,通過通信模塊(無線蜂窩通信或者說衛星鏈路通信)將差分改正數據傳播到定位終端。數據傳到定位終端即 V2X 車載單元和 V2X 路側單元后,在 GNSS+IMU(慣性傳感器)+ 其他傳感器系統方案輔助下,結合差分數據來使用高精度定位算法,從而生成車載單元和路側單元的組合定位。最后通過這一定位方式服務于車路協同一些典型應用場景。
在車路協同解決方案中,方案的實時性、安全性、可靠性具備較高要求。這時候,邊緣節點的引入非常重要,邊緣計算平臺需要實現數據收集、路由和分發等工作。但隨著數據的并發和數據量的增多,提升邊緣計算單元(MEC)使用數據的有效率就非常重要。千尋位置的解決方案中就為 V2X 及物聯網提供終端統一的時間體系,保障數據的互聯互通,從而實現復雜協同功能。
2、高精度 GNSS 與高級自動駕駛 HAD 場景
針對 L3 以上的功能場景,即高級自動駕駛 HAD 場景,千尋位置也提出了一套高精度定位解決方案。
(千尋位置 HAD 高精度定位方案架構)
同理通過 RTK 或者 SSR 差分服務技術解決定位誤差問題后,通過通信模塊將差分改正數據傳播到車載端,在車載端接收云端處理后數據后,除了 GNSS+ 慣性導航融合技術之外加入高精地圖的共同作用,以實現自動駕駛功能,除了常規的高精度位置之外,在 HAD 類型的定位解決方案中,千尋位置推出高完好性及功能安全 ASIL-B 等級的定位服務,有效解決系統級定位輸出不準導致的潛在安全風險。通過應用該高精度定位解決方案,自動駕駛系統可實現多個關鍵判斷,例如,幫助自動駕駛功能準確判斷設計運行區域(ODD),決定自動駕駛功能在合適的時候進行交接;在車道線不規則、車道線短暫覆蓋、道路無明顯標志物、彎道曲率過大等相對定位方案失效的情況下,汽車依然能夠根據準確的衛星定位和高精度地圖數據,進行自動駕駛功能決策。
最后,以上整體解決方案,都能夠被最小化集成至自動駕駛域控制器上,在不需求額外系統硬件配置,不消耗大量系統算力的情況下,最終落地在應用場景中。
4 如何從 0 接觸精準時空定位技術
目前,千尋位置面向企業開發者、個人開發者發布了名為“北斗智造者計劃”的支持計劃,旨在讓 IoT 開發者能夠通過北斗精準時空技術能力突破技術壁壘。并將在技術、生態、資金三個方面給予個人、企業開發者支持。
-
芯片
+關注
關注
456文章
50950瀏覽量
424722 -
移動互聯網
+關注
關注
5文章
598瀏覽量
34079 -
IOT
+關注
關注
187文章
4216瀏覽量
197051
原文標題:IoT時代,高精度GNSS技術如何解決IoT場景下的時空定位問題 | Q薦讀
文章出處:【微信號:infoqchina,微信公眾號:InfoQ】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
ADS7230有兩個電源和兩個地,是不是意味著芯片內部模擬部分和數字部分是隔離的?
ADS1274沒有DRDY信號輸出,是否意味著芯片已經損壞?
ADS8671 datasheet里寫的是小信號輸入-3db帶寬為15KHz,是不是意味著正常信號超過10K衰減已經很厲害了?
北斗衛星同步時鐘系統:精準時間的秘密

在ADS8320的規格書里,Tcsd最大為0ns,請問這是不是意味著Dclock極性只能是空閑為低?
ADC的數據表給出了±VREF的輸入范圍,是否意味著可以測量相對于接地的負電壓?
ADS1262浮空測量波動大,是否意味著連接上信號實測波動也會很大?
海格通信亮相2024年能源北斗與時空智能創新技術應用大會
超級電容的出現意味著儲能技術的突破

想要對脈寬3ns的脈沖信號進行放大,是不是意味著我選放大器時的響應時間要小于3ns?
解析OrangePi AIpro:什么是 NPU?它對你意味著什么?

芯耀輝科技解讀高速互連對于AI和大算力芯片而言意味著什么?
論述RISC-C在IOT領域的發展機會
以應用為導向的芯片設計趨勢,對EDA廠商意味著什么?






 工商網監
工商網監
評論