") 電力系統(tǒng)的遠(yuǎn)程自動化
電力系統(tǒng)的遠(yuǎn)程自動化
20世紀(jì)出現(xiàn)的大規(guī)模電力系統(tǒng)是人類工程科學(xué)史上最重要的成就之一。所以對于遠(yuǎn)程的電力系統(tǒng)如變電站就需要有一定的監(jiān)控裝置及監(jiān)控系統(tǒng),以通過結(jié)構(gòu)和系統(tǒng)的配合實現(xiàn)多電力自動化設(shè)施的及時監(jiān)控,能夠有效的保障電力的運行安全,降低人們經(jīng)濟(jì)財產(chǎn)的損失。
但是傳統(tǒng)的電力遠(yuǎn)程監(jiān)控裝置和系統(tǒng)卻存在著很多的不足之處,如具有不能夠有效的通過電力監(jiān)控系統(tǒng)控制電力監(jiān)控裝置來加強(qiáng)電力自動化的監(jiān)控,且電力監(jiān)控系統(tǒng)監(jiān)控方式單一,不能夠為后臺提供全面的監(jiān)控資料等問題。
技術(shù)實現(xiàn)要素:
本發(fā)明的目的在于提供一種電力自動化遠(yuǎn)程監(jiān)控裝置及其控制系統(tǒng),通過傳感器檢測單元和電路檢測單元對電力自動化的環(huán)境和運行進(jìn)行監(jiān)控,并配合對監(jiān)控攝像頭的控制,使得后臺處理中心和移動終端能夠?qū)崟r了解電力設(shè)施的運行情況,解決了現(xiàn)有遠(yuǎn)程監(jiān)控系統(tǒng)不能夠通過監(jiān)控裝置來實現(xiàn)全面監(jiān)控和監(jiān)控系統(tǒng)監(jiān)控方式單一的問題。
為解決上述技術(shù)問題,本發(fā)明是通過以下技術(shù)方案實現(xiàn)的:
本發(fā)明為一種電力自動化遠(yuǎn)程監(jiān)控裝置,包括支撐箱體和攝像頭殼體,所述支撐箱體的內(nèi)部設(shè)置有通孔,所述支撐箱體的頂面分別固定連接有圓形支撐桿和導(dǎo)向環(huán),所述支撐桿的中軸線與導(dǎo)向環(huán)的中軸線重合;所述通孔內(nèi)安裝有排氣扇;所述導(dǎo)向環(huán)的頂面設(shè)置有環(huán)形渦狀槽;所述支撐桿的頂面與攝像頭殼體的底面形成球面副連接,所述攝像頭殼體的底面固定連接有外齒輪,所述外齒輪的中軸線與支撐桿的中軸線重合;所述外齒輪的底面固定連接有與環(huán)形渦狀槽相適配的導(dǎo)向桿,所述外齒輪與固定連接在電機(jī)輸出軸上的圓柱齒輪相嚙合,所述電機(jī)通過支撐板與支撐桿的周側(cè)面固定連接。
進(jìn)一步地,所述支撐板的頂面與電機(jī)的底面固定連接,所述支撐板上設(shè)置有固定環(huán),所述固定環(huán)與支撐桿的周側(cè)面固定連接。
進(jìn)一步地,所述環(huán)形渦狀槽的截面輪廓為四分之三圓,所述導(dǎo)向桿的底面固定連接有與環(huán)形渦狀槽相適配的導(dǎo)向球。
進(jìn)一步地,所述支撐箱體的一端面為斜面,所述斜面與電力設(shè)施的柜體內(nèi)壁相連通。
一種電力自動化遠(yuǎn)程監(jiān)控裝置的控制系統(tǒng),所述控制系統(tǒng)包括傳感器檢測單元、電路檢測單元、監(jiān)控模塊、圖像處理模塊、GSM模塊、存儲模塊、發(fā)射模塊、執(zhí)行模塊和微處理器,所述傳感器檢測單元、電路檢測單元、GSM模塊、存儲模塊、圖像處理模塊、發(fā)射模塊和執(zhí)行模塊均與微處理器電性連接;所述微處理器通過發(fā)射模塊與后臺處理中心的接收模塊進(jìn)行信號連接;所述微處理器通過GSM模塊與移動終端進(jìn)行信號連接;所述傳感器檢測單元包括光照傳感器和氣味傳感器。
進(jìn)一步地,所述電路檢測單元包括電流檢測模塊和電壓檢測模塊。
進(jìn)一步地,所述傳感器檢測單元還包括溫度傳感器和濕度傳感器。
進(jìn)一步地,所述執(zhí)行模塊包括排氣扇和電機(jī)。
本發(fā)明具有以下有益效果:
1、本發(fā)明通過電機(jī)上的圓柱齒輪與外齒輪的嚙合來帶動攝像頭殼體的轉(zhuǎn)動,從而實現(xiàn)對電力自動化的360°監(jiān)控,有效的為后臺處理中心提供真實有效的監(jiān)控資料,保證電力設(shè)施的正常運行。
2、本發(fā)明通過外齒輪上的導(dǎo)向桿與導(dǎo)向環(huán)上的環(huán)形渦狀槽的配合,使得攝像頭殼體在轉(zhuǎn)動的過程中,攝像頭殼體的傾斜角度隨著環(huán)形渦狀槽與水平面的傾斜角度變化而變化,使得攝像頭能夠有效的對電力設(shè)施進(jìn)行全面的監(jiān)控,便于人們及時觀察電力設(shè)施的異常,降低人們經(jīng)濟(jì)財產(chǎn)的損失。
3、本發(fā)明通過傳感器檢測單元和電路檢測單元對電力自動化的環(huán)境和運行進(jìn)行監(jiān)控,并配合對監(jiān)控攝像頭的控制,使得后臺處理中心和移動終端能夠?qū)崟r了解電力設(shè)施的運行情況,保證電力設(shè)施的正常運行,豐富了監(jiān)控方式的功能。
當(dāng)然,實施本發(fā)明的任一產(chǎn)品并不一定需要同時達(dá)到以上所述的所有優(yōu)點。
附圖說明
為了更清楚地說明本發(fā)明實施例的技術(shù)方案,下面將對實施例描述所需要使用的附圖作簡單地介紹,顯而易見地,下面描述中的附圖僅僅是本發(fā)明的一些實施例,對于本領(lǐng)域普通技術(shù)人員來講,在不付出創(chuàng)造性勞動的前提下,還可以根據(jù)這些附圖獲得其他的附圖。
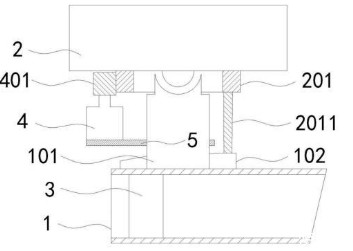
圖1為本發(fā)明一種電力自動化遠(yuǎn)程監(jiān)控裝置的剖視圖;
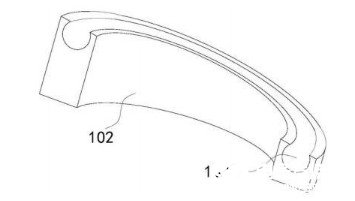
圖2為本發(fā)明的導(dǎo)向環(huán)的結(jié)構(gòu)示意圖;
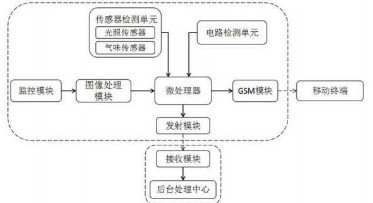
圖3為本發(fā)明一種電力自動化遠(yuǎn)程監(jiān)控裝置控制系統(tǒng)的系統(tǒng)圖;
附圖中,各標(biāo)號所代表的部件列表如下:
1-支撐箱體,2-攝像頭殼體,3-排氣扇,4-電機(jī),5-支撐板,101-支撐桿,102-導(dǎo)向環(huán),201-外齒輪,401-圓柱齒輪,1021-環(huán)形渦狀槽,2011-導(dǎo)向桿。
具體實施方式
下面將結(jié)合本發(fā)明實施例中的附圖,對本發(fā)明實施例中的技術(shù)方案進(jìn)行清楚、完整地描述,顯然,所描述的實施例僅僅是本發(fā)明一部分實施例,而不是全部的實施例。基于本發(fā)明中的實施例,本領(lǐng)域普通技術(shù)人員在沒有作出創(chuàng)造性勞動前提下所獲得的所有其它實施例,都屬于本發(fā)明保護(hù)的范圍。
在本發(fā)明的描述中,需要理解的是,術(shù)語“設(shè)置”、“底”、“頂”、“中”、“內(nèi)”等指示方位或位置關(guān)系,僅是為了便于描述本發(fā)明和簡化描述,而不是指示或暗示所指的組件或元件必須具有特定的方位,以特定的方位構(gòu)造和操作,因此不能理解為對本發(fā)明的限制。
實施例一
如圖1-2所示,本發(fā)明為一種電力自動化遠(yuǎn)程監(jiān)控裝置,包括支撐箱體1和攝像頭殼體2,支撐箱體1的內(nèi)部設(shè)置有通孔,支撐箱體1的頂面分別固定連接有圓形支撐桿101和導(dǎo)向環(huán)102,支撐桿101的中軸線與導(dǎo)向環(huán)102的中軸線重合。
通孔內(nèi)安裝有排氣扇3,排氣扇3可為電力自動化設(shè)施進(jìn)行散熱;
導(dǎo)向環(huán)102的頂面設(shè)置有環(huán)形渦狀槽1021,環(huán)形渦狀槽1021與導(dǎo)向環(huán)102的底面距離均不相同,且環(huán)形渦狀槽1021與導(dǎo)向環(huán)102的底面距離循序漸進(jìn)增大到減小,減小到增大,可有效的使得導(dǎo)向桿2011沿著環(huán)形渦狀槽1021的路徑帶動攝像頭殼體2的傾斜角度的變化,且此過程圓柱齒輪401與外齒輪201始終處于嚙合狀態(tài)。
支撐桿101的頂面與攝像頭殼體2的底面形成球面副連接,攝像頭殼體2的底面固定連接有外齒輪201,外齒輪201的中軸線與支撐桿101的中軸線重合;
外齒輪201的底面固定連接有與環(huán)形渦狀槽1021相適配的導(dǎo)向桿2011,外齒輪201與固定連接在電機(jī)4輸出軸上的圓柱齒輪401相嚙合,電機(jī)4通過支撐板5與支撐桿101的周側(cè)面固定連接,通過電機(jī)4的轉(zhuǎn)動,可帶動外齒輪201進(jìn)行轉(zhuǎn)動,進(jìn)而使得攝像頭殼體2進(jìn)行旋轉(zhuǎn),便于對電力設(shè)施進(jìn)行全面的監(jiān)控。
其中,支撐板5的頂面與電機(jī)4的底面固定連接,支撐板5上設(shè)置有固定環(huán),固定環(huán)與支撐桿101的周側(cè)面固定連接。
其中,環(huán)形渦狀槽1021的截面輪廓為四分之三圓,導(dǎo)向桿2011的底面固定連接有與環(huán)形渦狀槽1021相適配的導(dǎo)向球,可使得導(dǎo)向球在環(huán)形渦狀槽1021內(nèi)既具有限位作用,又沿著環(huán)形渦狀槽1021進(jìn)行運動。
其中,支撐箱體1的一端面為斜面,斜面與電力設(shè)施的柜體內(nèi)壁相連通,支撐箱體1可安裝在電力柜的內(nèi)部,還可安裝在電力設(shè)施密集的房間內(nèi)。
實施例二
如圖3所示,一種電力自動化遠(yuǎn)程監(jiān)控裝置的控制系統(tǒng),控制系統(tǒng)采用獨立電源進(jìn)行供電,避免受電力設(shè)施運行狀況的影響,控制系統(tǒng)包括傳感器檢測單元、電路檢測單元、監(jiān)控模塊、圖像處理模塊、GSM模塊、存儲模塊、發(fā)射模塊、執(zhí)行模塊和微處理器,傳感器檢測單元、電路檢測單元、GSM模塊、存儲模塊、圖像處理模塊、發(fā)射模塊和執(zhí)行模塊均與微處理器電性連接;
監(jiān)控模塊將拍攝圖像發(fā)送給圖像處理模塊,圖像處理模塊對圖像進(jìn)行特征提取,并與存儲模塊內(nèi)存儲的數(shù)據(jù)信息進(jìn)行比較,最后將比對結(jié)果發(fā)送至微處理器;
圖像處理模塊對圖像中的火花和火苗進(jìn)行特征提取。
數(shù)據(jù)信息為電力自動化設(shè)施正常工作時的圖像信息。
微處理器通過發(fā)射模塊與后臺處理中心的接收模塊進(jìn)行信號連接;
微處理器通過GSM模塊與移動終端進(jìn)行信號連接,移動終端為手機(jī)、平板電腦、手表手機(jī);
傳感器檢測單元包括光照傳感器和氣味傳感器,光照傳感器可檢測電力設(shè)施內(nèi)發(fā)生的電火花現(xiàn)象,氣味傳感器可檢測電力設(shè)施內(nèi)電路燒焦的氣味。
其中,電路檢測單元包括電流檢測模塊和電壓檢測模塊,電流檢測模塊和電壓檢測模塊可用于檢測電力設(shè)施的電壓和電流變化,并將檢測結(jié)果輸送至微處理器。
其中,傳感器檢測單元還包括溫度傳感器和濕度傳感器。
其中,執(zhí)行模塊包括排氣扇3和電機(jī)4。
本實施例的一個具體應(yīng)用為:
傳感器檢測單元和電路檢測單元通過檢測電力設(shè)施的異常情況,并將結(jié)果輸送至微處理器,而而處理器根據(jù)輸送的數(shù)據(jù)進(jìn)行判斷,并根據(jù)實際情況控制電機(jī)4或排氣扇3工作來對電力設(shè)施進(jìn)行監(jiān)控和散熱;如若情況異常,則微處理器通過GSM模塊與移動終端進(jìn)行信號連接,微處理器發(fā)射模塊與后臺處理中心的接收模塊進(jìn)行信號連接,最后微處理器將數(shù)據(jù)存儲在存儲模塊內(nèi)。
在本說明書的描述中,參考術(shù)語“一個實施例”、“示例”、“具體示例”等的描述意指結(jié)合該實施例或示例描述的具體特征、結(jié)構(gòu)、材料或者特點包含于本發(fā)明的至少一個實施例或示例中。在本說明書中,對上述術(shù)語的示意性表述不一定指的是相同的實施例或示例。而且,描述的具體特征、結(jié)構(gòu)、材料或者特點可以在任何的一個或多個實施例或示例中以合適的方式結(jié)合。
-
變電站
+關(guān)注
關(guān)注
7文章
1254瀏覽量
41824 -
電機(jī)
+關(guān)注
關(guān)注
142文章
9021瀏覽量
145501 -
自動化
+關(guān)注
關(guān)注
29文章
5578瀏覽量
79282 -
電力系統(tǒng)分析
+關(guān)注
關(guān)注
1文章
3瀏覽量
1298
發(fā)布評論請先 登錄
相關(guān)推薦
電力系統(tǒng)技術(shù)發(fā)展對二次自動化設(shè)備的電磁兼容性能影響
淺談電力系統(tǒng)中的時鐘同步技術(shù)
基于Matlab的電力系統(tǒng)潮流計算
電力系統(tǒng)監(jiān)控實驗平臺QY-PGD20 相關(guān)資料下載
自動化電力系統(tǒng)綜合實驗裝置設(shè)備
基于Matlab計算程序的電力系統(tǒng)運行分析
電力系統(tǒng)服務(wù)器是什么
電力系統(tǒng)規(guī)劃與運行
電力系統(tǒng)自動化與計算機(jī)技術(shù)
電力系統(tǒng)自動化實驗指導(dǎo)

Automation(電力系統(tǒng)及其自動化)
電力系統(tǒng)自動化的結(jié)構(gòu)
電力系統(tǒng)自動化九大研究方向
工業(yè)自動化和電力系統(tǒng)評估板8EBV89316數(shù)據(jù)手冊





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論