") PID原理與參數(shù)調(diào)試
PID原理與參數(shù)調(diào)試
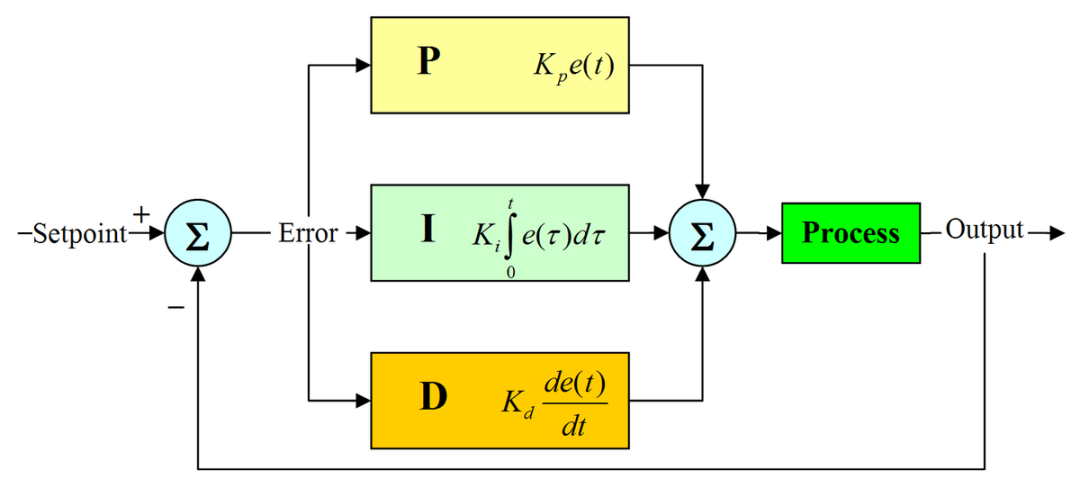
PID控制器(比例-積分-微分控制器),由比例單元(P)、積分單元(I)和微分單元(D)組成。
可以通過調(diào)整這三個(gè)單元的增益Kp,Ki和Kd來調(diào)定其特性,PID控制器主要適用于基本上線性,且動(dòng)態(tài)特性不隨時(shí)間變化的系統(tǒng)。
之前簡單寫過一篇關(guān)于PID的文章:重溫經(jīng)典PID算法
一、基礎(chǔ)理論
PID是以它的三種糾正算法而命名。受控變數(shù)是三種算法(比例、積分、微分)相加后的結(jié)果,即為其輸出,其輸入為誤差值(設(shè)定值減去測量值后的結(jié)果)或是由誤差值衍生的信號。若定義 {displaystyle u(t)} u(t)為控制輸出,PID算法可以用下式表示:

其中
Kp:比例增益,是調(diào)適參數(shù)
Ki:積分增益,也是調(diào)適參數(shù)
Kd:微分增益,也是調(diào)適參數(shù)
e:誤差=設(shè)定值(SP)- 回授值(PV)
t:目前時(shí)間
1.比例控件
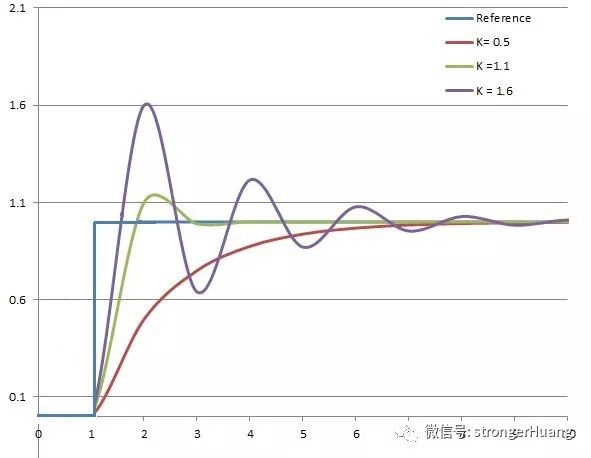
比例控制考慮當(dāng)前誤差,誤差值和一個(gè)正值的常數(shù)Kp(表示比例)相乘。
如下圖,不同比例增益Kp下,受控變數(shù)對時(shí)間的變化(Ki和Kd維持定值):
2.積分控件
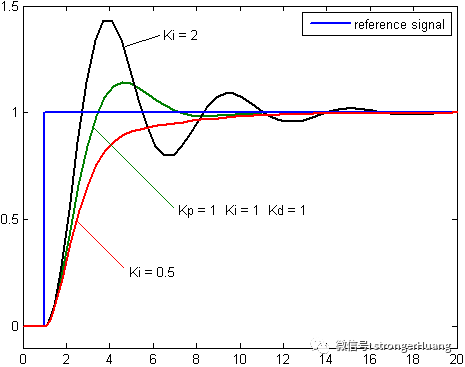
積分控制考慮過去誤差,將誤差值過去一段時(shí)間和(誤差和)乘以一個(gè)正值的常數(shù)Ki。
如下圖,不同積分增益Ki下,受控變數(shù)對時(shí)間的變化(Kp和Kd維持定值):
3.微分控件
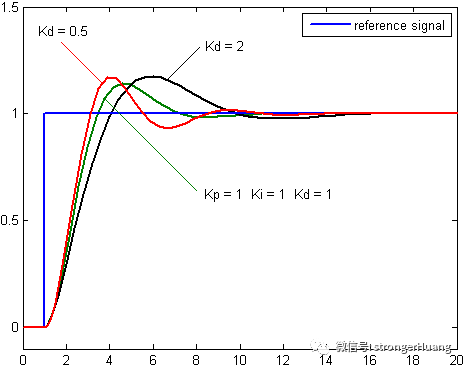
微分控制考慮將來誤差,計(jì)算誤差的一階導(dǎo),并和一個(gè)正值的常數(shù)Kd相乘。
如下圖,不同微分增益Kd下,受控變數(shù)對時(shí)間的變化(Kp和Ki維持定值):
二、參數(shù)調(diào)試
PID的參數(shù)調(diào)試是指通過調(diào)整控制參數(shù)(比例增益、積分增益/時(shí)間、微分增益/時(shí)間)讓系統(tǒng)達(dá)到最佳的控制效果。
穩(wěn)定性(不會(huì)有發(fā)散性的震蕩)是首要條件,此外,不同系統(tǒng)有不同的行為,不同的應(yīng)用其需求也不同,而且這些需求還可能會(huì)互相沖突。
PID只有三個(gè)參數(shù),在原理上容易說明,但PID參數(shù)調(diào)試是一個(gè)困難的工作,因?yàn)橐弦恍┨貏e的判據(jù),而且PID控制有其限制存在。歷史上有許多不同的PID參數(shù)調(diào)試方式,包括齊格勒-尼科爾斯方法等,其中也有一些已申請專利。
1.穩(wěn)定性若PID控制器的參數(shù)未挑選妥當(dāng),其控制器輸出可能是不穩(wěn)定的,也就是其輸出發(fā)散,過程中可能有震蕩,也可能沒有震蕩,且其輸出只受飽和或是機(jī)械損壞等原因所限制。不穩(wěn)定一般是因?yàn)檫^大增益造成,特別是針對延遲時(shí)間很長的系統(tǒng)。 2.最佳性能PID控制器的最佳性能可能和針對過程變化或是設(shè)定值變化有關(guān),也會(huì)隨應(yīng)用而不同。
兩個(gè)基本的需求是調(diào)整能力(regulation,干擾拒絕,使系統(tǒng)維持在設(shè)定值)及命令追隨 (設(shè)定值變化下,控制器輸出追隨設(shè)定值的反應(yīng)速度)。有關(guān)命令追隨的一些判據(jù)包括有上升時(shí)間及整定時(shí)間。有些應(yīng)用可能因?yàn)榘踩剂浚辉试S輸出超過設(shè)定值,也有些應(yīng)用要求在到達(dá)設(shè)定值過程中的能量可以最小化。
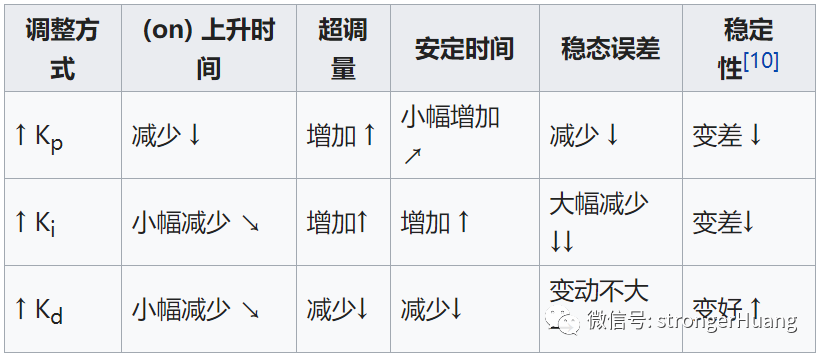
3.各調(diào)試方法對比

4.調(diào)整PID參數(shù)對系統(tǒng)的影響
-
PID算法
+關(guān)注
關(guān)注
2文章
172瀏覽量
24311 -
PID
+關(guān)注
關(guān)注
35文章
1472瀏覽量
85521 -
微分
+關(guān)注
關(guān)注
0文章
31瀏覽量
14102
發(fā)布評論請先 登錄
相關(guān)推薦
如何使用Python實(shí)現(xiàn)PID控制
如何調(diào)節(jié)PID參數(shù) PID控制器的調(diào)試方法
PID控制的優(yōu)缺點(diǎn)分析 PID參數(shù)調(diào)節(jié)的常見方法
串級控制pid參數(shù)怎么調(diào)節(jié)
變頻器的參數(shù)調(diào)試方法有哪些?

變頻器的參數(shù)調(diào)試方法有哪些
位置式PID與增量式PID的區(qū)別
PID溫度控制手冊
調(diào)試450W電機(jī)啟動(dòng)失敗的原因?如何解決?
什么是PID?PID各個(gè)參數(shù)有什么作用?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論