") STM32F4_TIM輸入波形捕獲 (脈沖頻率、占空比)
STM32F4_TIM輸入波形捕獲 (脈沖頻率、占空比)
Ⅰ、概述
本文基于上一篇文章“TIM輸入波形捕獲(脈沖頻率)”的基礎(chǔ)上進(jìn)行拓展,上一篇文章主要是捕獲波形的頻率,本文主要拓展捕獲波形的占空比。
筆者實(shí)驗(yàn)測(cè)試的方法和上一篇文章一樣,通過信號(hào)發(fā)生器產(chǎn)生PWM信號(hào),通過串口發(fā)送頻率和占空比到上位機(jī)(上位機(jī)串口助手顯示其數(shù)值)。(沒有信號(hào)發(fā)生器的朋友可以結(jié)合上一篇文章PWM輸出做信號(hào)源;在同一塊板子上也可以使用不同定時(shí)器,將PWM輸出引腳接在捕獲輸入引腳)
實(shí)驗(yàn)現(xiàn)象:不同頻率的實(shí)驗(yàn)現(xiàn)象請(qǐng)看上一篇文章(該文章提供的工程筆者也是進(jìn)行了大量不同頻率的測(cè)試,誤差在幾Hz屬正常范圍)。
1000Hz、20% - 80%占空比現(xiàn)象:
1000Hz、51% - 58%占空比現(xiàn)象:
關(guān)于本文的更多詳情請(qǐng)往下看。
Ⅱ、實(shí)例工程下載
筆者針對(duì)于初學(xué)者提供的例程都是去掉了許多不必要的功能,精簡了官方的代碼,對(duì)初學(xué)者一看就明白,以簡單明了的工程供大家學(xué)習(xí)。
筆者提供的實(shí)例工程都是在板子上經(jīng)過多次測(cè)試并沒有問題才上傳至360云盤,歡迎下載測(cè)試、參照學(xué)習(xí)。
提供下載的軟件工程是STM32F417的,但F4其他型號(hào)也適用(適用F4其他型號(hào):關(guān)注微信,回復(fù)“修改型號(hào)”)。
STM32F4_TIM輸入波形捕獲(脈沖頻率、占空比)實(shí)例:
https://yunpan.cn/cB2iknrjczWXe 訪問密碼 764c
STM32F4資料:
https://yunpan.cn/cR2pxqF5x2d9c 訪問密碼 53e7
Ⅲ、原理描述
筆者將捕獲PWM波形簡單畫了一個(gè)示意圖:
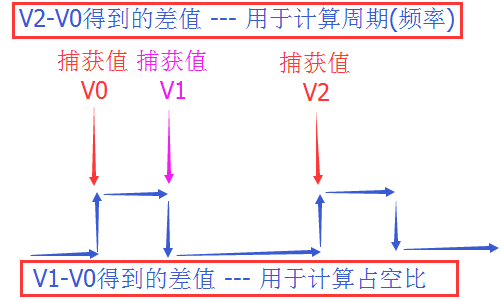
從上面的示意圖可以看得出來我們需要捕獲三個(gè)值(兩個(gè)上升沿和中間的下降沿)。兩個(gè)上升沿用于計(jì)算一個(gè)波形的周期(也就是可以計(jì)算其頻率),因?yàn)椴东@的“周期差值”就是脈沖數(shù),而通過配置,我們可以知道每一個(gè)脈沖數(shù)的時(shí)間,這樣就知道整個(gè)“周期差值”的時(shí)間。得到了“占空比差值”和“周期差值”,波形的占空比就得到了。
筆者將TIM分為三大塊:時(shí)基部分、比較輸出和輸入捕獲,請(qǐng)看下面截圖“通用TIM框圖”。
前面的文章已經(jīng)將“時(shí)基部分”的一些基礎(chǔ)知識(shí)講述過了,“時(shí)基部分”的功能是比較有用的,它除了可以用來延時(shí)(定時(shí))之外,它還可以拿來觸發(fā)其他一些功能,如:觸發(fā)DA轉(zhuǎn)換、AD采集等。
上一篇文章講述的就是圖中比較輸出部分,比較輸出部分功能相對(duì)比較簡單。
該文主要講述“輸入捕獲”部分,這部分輸入的通道1與2、通道3與4可以相互協(xié)作。該文只使用了TIM5的通道3,捕獲輸入信號(hào)頻率。
通用TIM框圖:
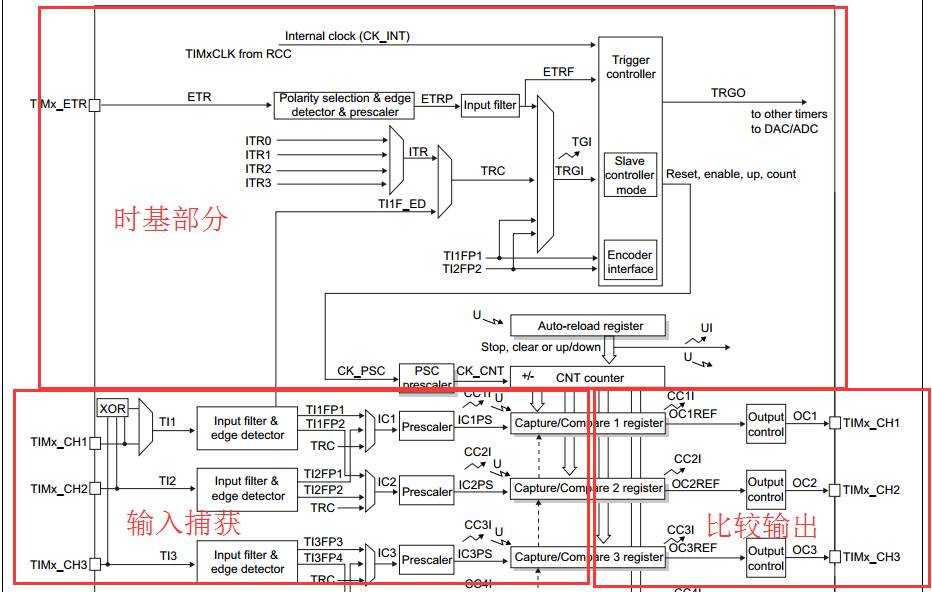
上面兩圖截取“STM32F4x5、x7參考手冊(cè)”建議下載手冊(cè)參看。
Ⅳ、源代碼分析
筆者以F4標(biāo)準(zhǔn)外設(shè)庫(同時(shí)也建議初學(xué)者使用官方的標(biāo)準(zhǔn)外設(shè)庫)為基礎(chǔ)建立的工程,主要以庫的方式來講述。
源代碼很多地方都是和上一篇文章源代碼相同,只修改了幾個(gè)地方(其實(shí)主要就是增加了一路捕獲占空比相關(guān)的配置):輸入引腳的配置、TIM捕獲配置及其中斷、中斷函數(shù)處理、主函數(shù)發(fā)送數(shù)據(jù)。
RCC、NVIC等這些容易忘記配置的地方都一樣。
1.TIM輸入捕獲引腳配置
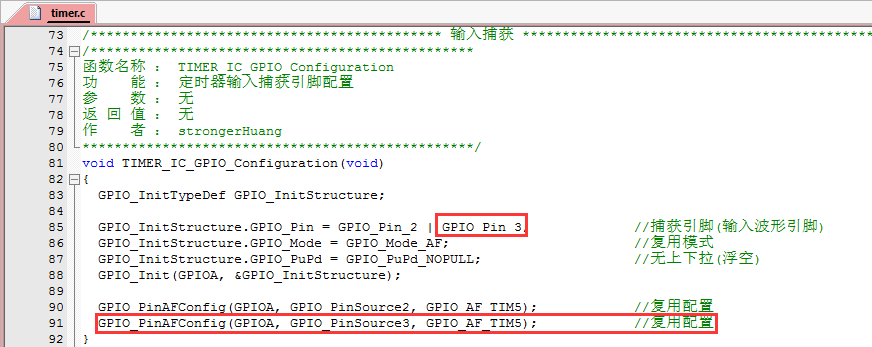
該函數(shù)位于timer.c文件下面;
主要增加了一路引腳。
注意2點(diǎn):
A.引腳與通道對(duì)應(yīng):這個(gè)需要參看“數(shù)據(jù)手冊(cè)”,該文TIM5通道3對(duì)應(yīng)的引腳就是PA2.
B.復(fù)用配置:GPIO_PinAFConfig(GPIOA,GPIO_PinSource2, GPIO_AF_TIM5);
這個(gè)地方對(duì)于F1轉(zhuǎn)F0、F4等的朋友需要注意,更加芯片系列及庫的不同,他們之間存在一定的差異。
2.TIM輸入捕獲配置
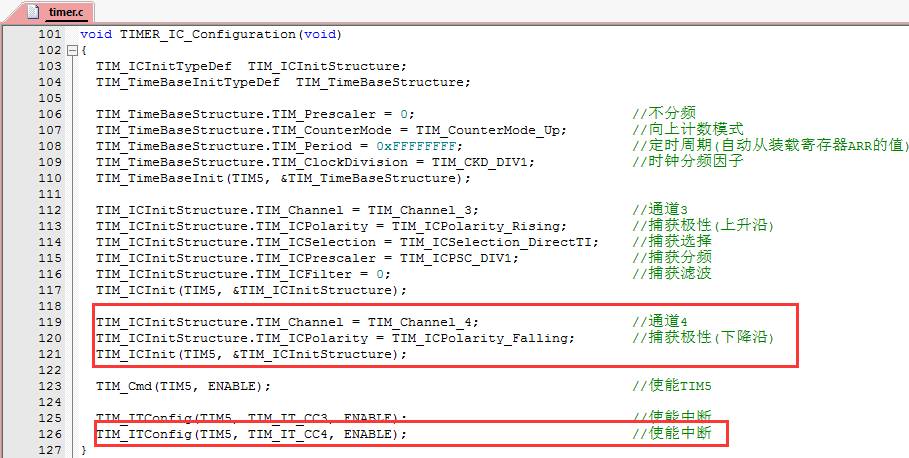
該函數(shù)位于timer.c文件下面;
“時(shí)基部分”是在前面兩篇文章講述過的,這里主要對(duì)“輸入捕獲”部分理解,主要5個(gè)參數(shù):
捕獲通道:就是我們捕獲的通道;
捕獲極性:就是我們捕獲脈沖的高還是低電平;
捕獲選擇:是直接捕獲該通道,還是上面說的1,2通道協(xié)助捕獲;
捕獲分頻:對(duì)捕獲的脈沖分頻;
捕獲濾波:過濾掉波形;
3.計(jì)算捕獲波形頻率原理
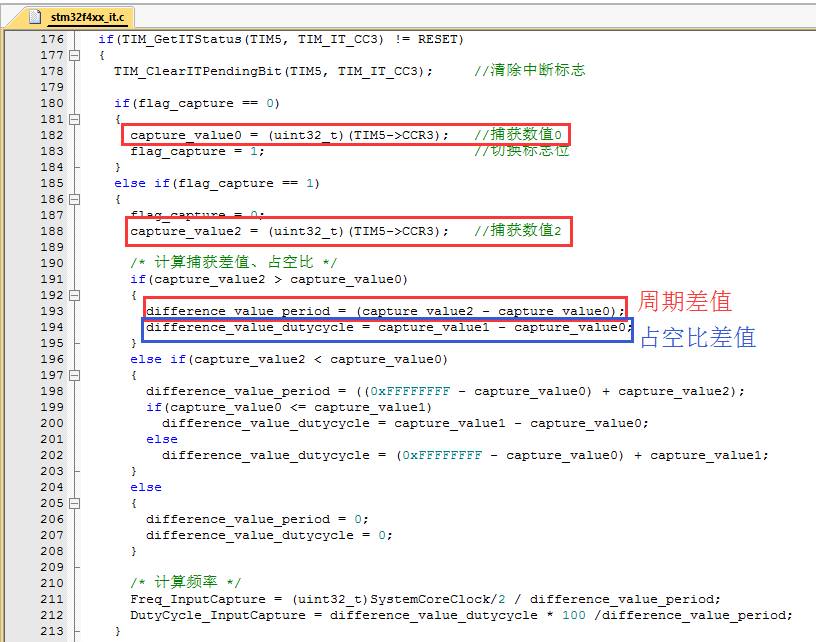
該函數(shù)位于stm32f4xx_it.c文件下面;
該函數(shù)是TIM捕獲波形的中斷函數(shù),同一個(gè)(TIM5)中斷入口,有兩個(gè)通道通道,也是計(jì)算頻率和占空比重要的函數(shù);
結(jié)合原理描述中“示意圖”可以知道,我們需要捕獲3個(gè)值:V0、V2和V1。
V0和V2是在通道3捕獲:
capture_value0 = (uint32_t)(TIM5->CCR3);
capture_value2 = (uint32_t)(TIM5->CCR3);
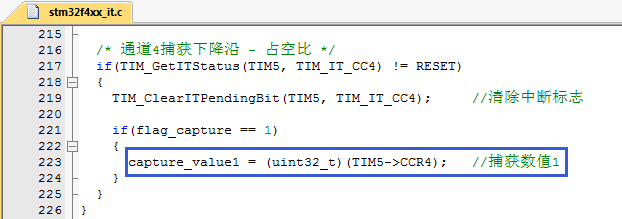
V1在通道4捕獲:
capture_value1 = (uint32_t)(TIM5->CCR4);
其中有一個(gè)標(biāo)志位flag_capture是用于標(biāo)志我們捕獲的狀態(tài),我們捕獲了V0將flag_capture= 1就是告訴程序我們要捕獲V1 和 V2的值了。
-
波形
+關(guān)注
關(guān)注
3文章
379瀏覽量
31603 -
引腳
+關(guān)注
關(guān)注
16文章
1206瀏覽量
50720 -
Tim
+關(guān)注
關(guān)注
0文章
81瀏覽量
17914 -
STM32F4
+關(guān)注
關(guān)注
3文章
194瀏覽量
28104
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
AMC1304M25-Q1 CLKIN輸入范圍是否只能是5~20M,DOUT高低電平獲取的周期是多少?
使用STM32F1輸入捕獲功能時(shí),TIM6和TIM7無法實(shí)現(xiàn)輸入捕獲是哪里的問題?
用STM32的一個(gè)芯片測(cè)PWM輸入,頻率有的時(shí)候不對(duì)是什么原因造成的?
TIM未捕獲TC399 KIT的TOM輸出,為什么?
STM32F723ZET6定時(shí)器輸入捕獲通道的GPIO不能上拉怎么解決?
求助,關(guān)于STM32F輸入捕獲問題求解
STM32F407 TIM3 CH2 PWM輸入捕獲結(jié)果不正確的原因?
STM32F103的TIM14輸入捕獲極性CC1P可設(shè)置為雙沿嗎?
在使用一個(gè)定時(shí)器捕獲兩路PWM的頻率時(shí),中斷函數(shù)應(yīng)該如何配置呢?
STM32F103VE搭建的PWM輸入捕獲功能,移植到STM32F103VD無法捕獲的原因?
STM32F723ZET6定時(shí)器輸入捕獲通道的GPIO不能上拉的原因?
tc377調(diào)試pwm輸入捕獲,輸入頻率小于10hz時(shí)輸入占空比就會(huì)跳變的原因?
利用TIMER測(cè)量信號(hào)周期及占空比的精度






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論