") 視覺(jué)信息如何輔助激光導(dǎo)航AGV的應(yīng)用
視覺(jué)信息如何輔助激光導(dǎo)航AGV的應(yīng)用
針對(duì)移動(dòng)機(jī)器人激光導(dǎo)航定位取卸貨過(guò)程,發(fā)生的貨物位置偏差大而導(dǎo)致的取卸貨不成功的情況,本文給出了一種解決方法,即視覺(jué)輔助運(yùn)用模板匹配,提取感興趣區(qū)域,邊緣檢測(cè)提取輪廓找中心點(diǎn)來(lái)檢測(cè)貨物托盤(pán)所在的位置,再通過(guò)數(shù)據(jù)通信轉(zhuǎn)換,將視覺(jué)檢測(cè)結(jié)果傳輸給移動(dòng)機(jī)器人,從而可保證其能夠連續(xù)穩(wěn)定地進(jìn)行取卸貨。
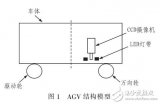
目前AGV導(dǎo)航定位使用中較為普遍的技術(shù)是激光定位技術(shù)。激光傳感器被固定在AGV頂部,掃描與其在一個(gè)固定平面上的反光板與移動(dòng)機(jī)器人的距離,并依據(jù)反饋的距離數(shù)據(jù)構(gòu)建成導(dǎo)航地圖。在導(dǎo)航過(guò)程中,AGV規(guī)劃的前往地圖中上位機(jī)下發(fā)的已知的目標(biāo)地點(diǎn)執(zhí)行任務(wù),同時(shí)AGV實(shí)時(shí)反饋位置信息和任務(wù)執(zhí)行情況,如圖1。
過(guò)程中由于貨物的存放可能存在人為改變,或是AGV某一次存放位置偏差較大等,這會(huì)造成下一次AGV裝配過(guò)程的失敗,執(zhí)行效率降低的同時(shí)存在一定不安全性,因此本文提出在實(shí)際應(yīng)用中利用激光導(dǎo)航定位的同時(shí),結(jié)合視覺(jué)傳感器獲取信息豐富的特點(diǎn),對(duì)視覺(jué)信息進(jìn)行基于灰度值的模版匹配算法與輪廓邊緣檢測(cè)算法找出待取貨物下托盤(pán)的中心位置,來(lái)保證AGV能夠進(jìn)行正常的任務(wù)操作。
一、系統(tǒng)結(jié)構(gòu)
系統(tǒng)主要包含三個(gè)模塊:1.AGV系統(tǒng)調(diào)度;2.視覺(jué)輔助;3.數(shù)據(jù)通信。AGV系統(tǒng)硬件結(jié)構(gòu),如圖2。
激光定位選擇比較成熟的基于反光板的定位算法,物料管理系統(tǒng)下發(fā)任務(wù),AGV管理監(jiān)控計(jì)算機(jī)將任務(wù)具體下發(fā)分配給AGV,車(chē)到相應(yīng)站臺(tái)執(zhí)行任務(wù)。視覺(jué)輔助運(yùn)用模板匹配,提取感興趣區(qū)域,邊緣檢測(cè)提取輪廓找中心點(diǎn)來(lái)檢測(cè)貨物托盤(pán)所在的位置,數(shù)據(jù)通信部分則主要進(jìn)行通信轉(zhuǎn)換,將視覺(jué)檢測(cè)結(jié)果傳輸給AGV,AGV依據(jù)得到數(shù)據(jù),對(duì)車(chē)位置進(jìn)行相應(yīng)調(diào)整,同時(shí)包含一些對(duì)HMI與相機(jī)實(shí)時(shí)通信交互。
1.激光雷達(dá)
測(cè)激光雷達(dá)采用倍加福與科爾摩根共同開(kāi)發(fā)的LS2000,是脈沖測(cè)距技術(shù)的二維激光掃描儀,具有很高的重復(fù)精度和較短的響應(yīng)時(shí)間,其掃描角度360°,測(cè)量距離可達(dá)30米,10~50Hz掃描頻率,激光傳感器安置在車(chē)體頂部,激光導(dǎo)航基于使用反光板的自由制導(dǎo)。使用反光板更新位置,根據(jù)跟蹤車(chē)輛運(yùn)動(dòng)的里程表(編碼器數(shù)據(jù)),車(chē)輛位置會(huì)不斷更新。使用反射器的量值更新位置。導(dǎo)航始終處于活動(dòng)狀態(tài)。激光掃描的2D平面數(shù)據(jù)信息來(lái)進(jìn)行激光導(dǎo)航定位與地圖構(gòu)建。
2.單目相機(jī)
用易福門(mén)O3D303的3D攝相機(jī),能夠提供352×264的RGB圖像及深度圖像,每次測(cè)量輸出 23000 個(gè)距離和灰度值,可進(jìn)行距離、液位或體積的視覺(jué)評(píng)估,我們這里主要用于距離視覺(jué)評(píng)估,孔徑角為60×45,有效深度范圍0.3~8.0m,通過(guò)以太網(wǎng)接口進(jìn)行通信。其在車(chē)體上安裝,如圖3。
3.通信系統(tǒng)
AGV與相機(jī)的通信用貝加萊的觸摸屏進(jìn)行數(shù)據(jù)轉(zhuǎn)換,HMI與車(chē)之間用CAN通信,觸摸屏和相機(jī)之間用UDP通信,圖4通信流程圖給出了彼此之間具體的通信步驟和遇到問(wèn)題的一些處理方式,數(shù)據(jù)傳輸采用實(shí)時(shí)通訊,以保證相機(jī)的正常工作和相機(jī)與屏之間通信的正常,從而保證整個(gè)系統(tǒng)成功運(yùn)行。
4.OpenCV
OpenCV 是一個(gè)開(kāi)源的代碼部分用C/C++編寫(xiě)的計(jì)算機(jī)視覺(jué)庫(kù),能夠運(yùn)行在 Windows、Mac、Linux等操作系統(tǒng)上,其對(duì) Python、Ruby、Java 等語(yǔ)言均具有良好兼容性,具有相應(yīng)接口,OpenCV用一個(gè)簡(jiǎn)單的計(jì)算機(jī)視覺(jué)框架幫助程序開(kāi)發(fā)人員高效地開(kāi)發(fā)出相關(guān)的程序。
二、圖像處理
1.模板匹配
模板匹配是一項(xiàng)在一幅圖像中尋找與另一幅模板圖像最匹配部分的技術(shù),這種方法原理簡(jiǎn)單,具有較高匹配精度,遍歷圖像中的每一個(gè)位置,比較模板與各位置相似程度,當(dāng)匹配度量值足夠高時(shí),就認(rèn)為在搜索圖中找到了目標(biāo)。模板匹配的實(shí)現(xiàn)函數(shù):matchTemplate(srcImage ,templateImage , result , MatchMethod );其實(shí)現(xiàn)流程圖與模板和搜索結(jié)果如圖5、圖6、圖7,MatchMethod采用標(biāo)準(zhǔn)相關(guān)性系數(shù)匹配,其采用相關(guān)系數(shù)(標(biāo)準(zhǔn)化的協(xié)方差)作為相似性度量。
2.邊緣檢測(cè)與定位中心點(diǎn)
基于模板匹配出的感興趣區(qū)域,將其從搜索結(jié)果圖中單獨(dú)提取出來(lái)進(jìn)行邊緣檢測(cè),邊緣檢測(cè)系統(tǒng)由加載感興趣區(qū)域、模糊化降噪、Canny算子邊緣檢測(cè)、尋找輪廓、繪制輪廓、定位輪廓中心點(diǎn)組成。對(duì)于尋找到的所有輪廓,通過(guò)設(shè)定閾值移除過(guò)大或過(guò)小輪廓,最終得到矩形輪廓,進(jìn)而對(duì)矩形區(qū)域?qū)ふ抑行狞c(diǎn),提取繪制的輪廓,如圖8。
三、實(shí)驗(yàn)結(jié)果與分析
在已有激光導(dǎo)航系統(tǒng)中加入視覺(jué)定位數(shù)據(jù),并在室內(nèi)環(huán)境進(jìn)行測(cè)試,實(shí)驗(yàn)?zāi)康氖菧y(cè)試在貨物存放已有誤差的條件下,視覺(jué)定位數(shù)據(jù)信息發(fā)送給激光導(dǎo)航的AGV,AGV依據(jù)它進(jìn)行位置調(diào)整后進(jìn)行取卸貨。首先帶有任務(wù)的AGV到達(dá)指定位置等待視覺(jué)系統(tǒng)拍照處理,對(duì)處理后的灰度圖進(jìn)行模板匹配、將匹配出的模板部分提取出來(lái)進(jìn)行邊緣檢測(cè)輪廓提取,最后根據(jù)檢測(cè)的矩形輪廓找尋到要定位的中心點(diǎn),并經(jīng)過(guò)坐標(biāo)轉(zhuǎn)換求得車(chē)相對(duì)中心點(diǎn)的偏移,最終得到的檢測(cè)結(jié)果如圖9,
實(shí)驗(yàn)結(jié)果如圖10。
可見(jiàn),視覺(jué)系統(tǒng)可以較為精準(zhǔn)的得出偏移信息,實(shí)現(xiàn)了AGV更為有效精準(zhǔn)的任務(wù)執(zhí)行流程。
四、總結(jié)與展望
激光定位能夠?qū)崿F(xiàn)較高精度水平的定位,但在上位機(jī)已經(jīng)下達(dá)所需要取卸貨位置后,AGV會(huì)嚴(yán)格按照任務(wù)命令執(zhí)行,到達(dá)位置是在誤差范圍內(nèi)固定的,存在裝載失敗、取不到貨物的情況,AGV 輸送系統(tǒng)的主要特點(diǎn)把物流優(yōu)化到最佳狀況做到效率最優(yōu)化,故加入視覺(jué)輔助信息,極大增強(qiáng)貨物存卸位置的靈活性,極大提高了工作效率,減少了現(xiàn)場(chǎng)調(diào)試人員的任務(wù)工作量,視覺(jué)信息的補(bǔ)充使得最終移動(dòng)機(jī)器人可以快速準(zhǔn)確地完成工作,為任務(wù)快速高效完成提供助力。
-
傳感器
+關(guān)注
關(guān)注
2551文章
51105瀏覽量
753614 -
機(jī)器人
+關(guān)注
關(guān)注
211文章
28420瀏覽量
207111 -
AGV
+關(guān)注
關(guān)注
27文章
1308瀏覽量
41096
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦

激光導(dǎo)航AGV叉車(chē),開(kāi)啟智能物流新時(shí)代! # AGV舵輪# AGV驅(qū)動(dòng)輪# AGV重載舵輪# 激光導(dǎo)航叉車(chē)
激光導(dǎo)航AGV底盤(pán)定制 巡檢機(jī)器人,服務(wù)機(jī)器人,智慧物流搬運(yùn)AGV
激光導(dǎo)航AGV的價(jià)格和國(guó)外的激光導(dǎo)航AGV大比拼!
AGV激光雷達(dá)SLAM定位導(dǎo)航技術(shù)
基于視覺(jué)導(dǎo)航AGV的多路徑快速檢測(cè)算法
深入解析AGV磁釘導(dǎo)航方案
為什么激光導(dǎo)航AGV如此受歡迎,它的優(yōu)勢(shì)是什么
激光導(dǎo)航AGV中最常見(jiàn)的控制算法都有哪些
激光導(dǎo)航agv常見(jiàn)的三大應(yīng)用場(chǎng)景分別是什么
AGV的視覺(jué)避障主要導(dǎo)引和導(dǎo)航方式
視覺(jué)紋理導(dǎo)航,亦稱(chēng)Visual SLAM導(dǎo)航

激光,磁性,視覺(jué)?什么是AGV最好的導(dǎo)航系統(tǒng)?
視覺(jué)系統(tǒng)輔助引導(dǎo)在激光導(dǎo)航AGV中應(yīng)用
AGV激光導(dǎo)航定位技術(shù)與構(gòu)建地圖

AGV激光導(dǎo)航定位技術(shù)綜述與發(fā)展趨勢(shì)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論