 旋轉編碼器的基本原理解析
旋轉編碼器的基本原理解析
機械手臂及致動器的控制,機器人移動方位的估測,均須倚靠量測裝置的回饋值,幾乎所有精密的機器人系統,均須配置相關位置與角度的感測器,因此線性及角度的量測可說是精密控制技術中的主要單元,這些系統的能力取決于解析度、精度、重覆性、量測范圍以及最大速度,因此量測儀器的解析度、精度、重覆性、量測范圍以及最大反應速度相當重要,而高精度的線性及角度的量測儀器最常使用的就是光柵型編碼器。
光柵型編碼器分為長形及圓形兩種,長形如一根尺規,圓形有如刻度盤,在大多數情況下線寬與間距的寬度相等亦即明暗等距,在測量長度時采用長光柵,測量角度采用圓光柵。 線寬與間距和稱為光柵的柵距,制造光柵的方法分為直接刻劃、曝光復制與滾壓制造等,光柵材料分為玻璃透射式、金屬反射式及鋼帶反射式,依光柵表面形狀又分為黑白幅值光柵或相位光柵,黑白幅值光柵的柵線與間距是黑白等距相間,而相位光柵其光柵的橫截面為鋸齒狀即三角波狀或弦波狀,本文將針對旋轉編碼器的基本原理與設計包含光源、光柵、光偵測器及訊號分析介紹。
一、旋轉編碼器種類
旋轉編碼器可作為旋轉運動、角速度測量感測器,也可與機械測量載體,例如導螺桿聯用,用于測量直線運動。 應用領域包括馬達、工具機、木工機械、紡織機械、機器人和運送設備以及各種測量、測試和檢驗設備。
旋轉編碼器可分為應用光學光柵原理和磁性磁柵原理兩類,由于使用光學光柵原理的光學式旋轉編碼器比使用磁性原理的磁式旋轉編碼器具有精度高,光感測元件來源較多,與容易制作等優點,光學式旋轉編碼器目前在技術與生產產量上皆居于主流地位。 但由于應用磁性磁柵原理的磁式旋轉編碼器抗環境污染能力強,于編碼式定位量測系統旋轉編碼器市場上仍占一席之地。
光學式旋轉編碼器主要是由中心軸、主光柵盤、副光柵、發光二極體及光偵測器組成。 LED的光源可以經由主光柵盤、副光柵至光偵測器,當主光柵盤隨中心軸旋轉時,光偵測器便收到不同的光源并依次產生訊號。 旋轉編碼器根據其刻度方法及信號輸出形式,可分為增量式、絕對式以及混合式三種,增量式旋轉編碼器在角度測量和角速度測量較絕對式旋轉編碼器更具有廉價和簡易的優勢。 但針對高精度的伺服系統而言,提高伺服系統的精度,首先必須提高位置反饋的精度,因此隨著精度要求的提升,絕對式旋轉編碼器日漸重要。
光學式軸編碼器主要構成為一個可旋轉圓盤,其周圍邊緣有許多細縫之槽孔。 在圓盤的一側放置光源,另一例放置光感測器。 當圓盤旋轉時,光感測器即接收到on-off的脈波,計算脈波的數量,即可計算出旋轉的角度或位移長度。 光學式軸編碼器,可分為增量式及絕對式編碼器兩種型式,兩者主要差別在于輸出信號不同,前者輸出為A、B相之方波;后者輸出為特定之數位碼,在編碼器解析度范圍內之任一角度,均有唯一之碼對應。
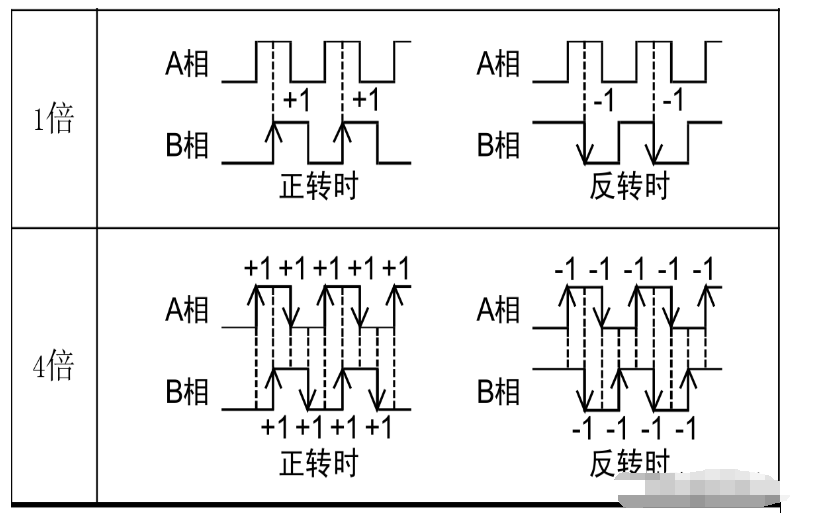
A. 增量型光學編碼器一旋轉軸帶動刻有光柵的圓盤,兩側分別擺放發光二極體與光電檢測器,發光二極體光線若透過光柵讓光電檢測器接受到,所以當圓盤不斷旋轉光電晶體將持續送出on與off訊號,我們只要記錄訊號出現的數目即可計算出旋轉角度。 當然圓盤的光柵愈密,所能量測的角度位置精度越高。 需要提高分辨率時,可利用90度,相位差A,B兩路信號,對原脈沖進行倍頻。
B. 絕對光學編碼器絕對編碼器的碼盤是由一系列同心圓的軌道組成。 每層軌道以從外向裡按軸位代碼的二進制的權分割成等距的區段,外層軌道為最低位,內層軌道為最高位。 二進制碼優點是可直接進入計算機工作,但它在交界面上會出現錯讀,并且隨著碼盤輸出值的增加,讀數誤差也伴隨增大。 例如在二進制碼盤,0與15的交界面上,由于工藝和裝配的因素可能讀成1111或0000以外,任何數字都可出現,即發生非單值性,這就產生讀數誤差。
增量式旋轉編碼器量測目前位置的方式由原點開始計數量測步距,或細分割信號周期并計數,增量式編碼器具有參考點,開機時必須執行原點復歸操作,以建立機械基準點。 具換向信號的旋轉編碼器可提供轉軸的角度位置而無需測量前移動,其精度足以正確地控制永磁式三相馬達旋轉磁場的相位。 而絕對式角度編碼器和旋轉編碼器無需執行原點復歸就能直接量測目前位置值。 單轉式是絕對編碼器可提供一轉內的位置值,而多轉式編碼器還能區分不同轉數的位置值。 由于增量編碼器比絕對編碼器使用碼盤軌道少,這樣,它的導線數、滑環數、讀出器、電路和顯示元件保持最低,使得系統可靠性增大,成本降低。 因此,現代系統多傾向采用增量編碼器。 增量編碼器主要缺點是測量僅相對于一個固定點,假如這個點有誤差,整個系統受損害。 另一個問題是當電源出現故障時,常常導致數據丟失,須使用輔助數據記憶技術,以防止丟失。
二、光學式編碼器基本原理
光學式編碼器依其形狀分為圓形及線型(光學尺)兩種,依檢測方式分平行狹縫方式、莫爾條紋方式、縱向條紋方式,依光學特性分反射式及穿透式兩種。 目前光學式編碼器大部份采用平行狹縫方式,基本光學式旋轉編碼器之設計如圖1所示,其原理為使用一個帶有主光柵之碼盤(main scale)及副光柵(Index grating )、光源及光偵測模組。 碼盤、副光柵相對轉動,通過之光強產生變化,形成周期性三角波訊號,因繞射關系實際輸出波型近似正弦波如圖,輸出訊號周期與主光柵之柵距相同,因此通過計數器可數出碼盤、副光柵相對轉動角度。 因應定位系統的需求,旋轉編碼器必需有A、A1、B、B1、Z1及Z2等六個訊號輸出,傳統設計上就必需有六對光源與光偵測器模組,光源部份其目的在發出近似平行的紅外光,穿過光柵,到達光偵測器,副光柵作用是與主光柵重疊以產生位移訊號,副光柵上共分成A、A1、B、B1、Z1及Z2,Z之設計是在每圈產生寬度在柵距內之脈沖訊號做為參考,又稱為零位光柵。 最后由光偵測模組將光強訊號轉為電流訊號。 以下將分別針對各模組一一介紹。
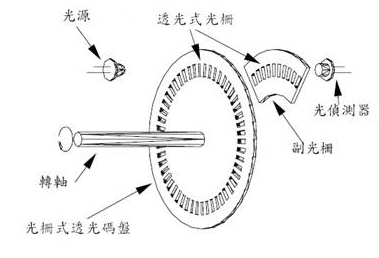
圖1 基本光學式旋轉編碼器構造
責任編輯;zl
-
旋轉編碼器
+關注
關注
5文章
159瀏覽量
25984
發布評論請先 登錄
相關推薦
ENHP旋轉編碼器應用及接線
解析旋轉編碼器的工作原理
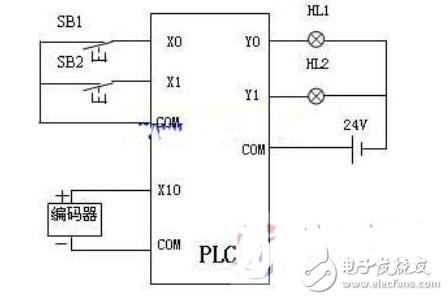
旋轉編碼器參數_旋轉編碼器與plc連接
編碼器的分辨率如何理解?
旋轉編碼器能直接換嗎_旋轉編碼器更換注意事項






 工商網監
工商網監
評論