 概率機器人的實際案例以及啟示
概率機器人的實際案例以及啟示
(文章來源:網絡整理)
機器人學是一門通過計算機控制設備來感知和操縱客觀世界的科學。成功的機器人系統實例包括,用于行星探測的移動機器人平臺、裝配線上的工業機械臂、自主車和輔助外科醫生的機械手等。機器人系統處于客觀世界中,通過傳感器感知周圍環境的信息,并通過機械力控制環境。為了完成各種各樣的任務,機器人必須能接納客觀世界中存在的大量的不確定因 素。
機器人的不確定性因素很多。其所處環境就是不可預測的。在良好的結構化環境(如裝配生產線)中不確定程度是較低的;但是對于高速公路這樣的環境,環境是高度動態的而且在許多方面是無法預測的。另一個不確定因素則是傳感器測量范圍和精度。
概率機器人學是機器人學中相對較新的方向,它致力于研究機器人感知和行為的不確定性。概率機器人的主要思想就是用概率理論的運算去明確地表示這種不確定性,換句話說,不再只依賴可能出現的情況的單一的“最好推測“而是用概率算法來表示在整個推測空間的概率分布信息。以數學上合理的方式來表示模糊性和置信度。然后根據存在的不確定性選擇相對魯棒的控制方式。
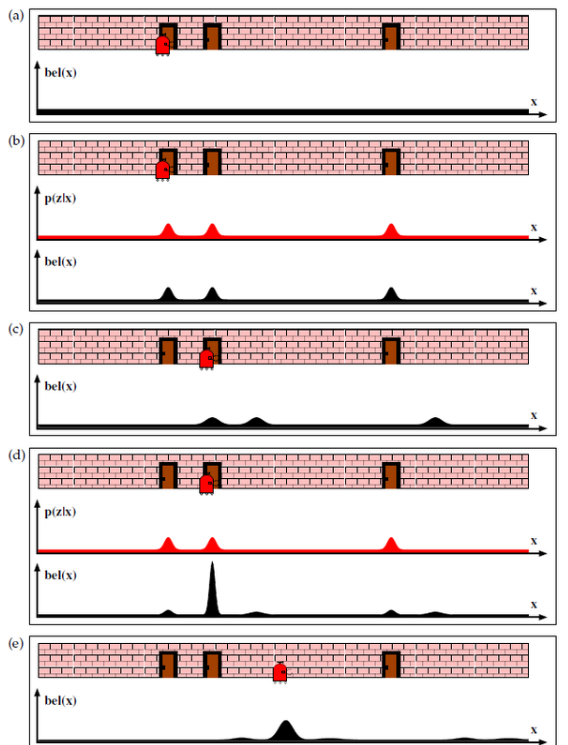
用兩個有意思的例子來闡述概率機器人:一個是有關機器人感知的;另一個是有關機器人規劃和控制的。機器人定位,就是相對外部的參考系來估計機器人坐標的問題。給定環境地圖,機器人需要參照傳感器數據,定位自己在地圖上的相對位置。已知環境中有三個相同的門,機器人的任務就是要通過檢測和運動找到自己在哪。
這種定位問題被稱為全局定位。在全局定位中,機器人被放置在已知的環境中的某處然后從頭開始確定自己的位置。概率范式通過在整個位置空間上的一個概率密度函數來表示機器人的瞬時置信度。如圖1.1a所示,所有位置具有相同的概率分布。假定機器人進行了第一次傳感器測量并知道自己在門附近,概率技術利用這個信息來更新置信度度,1.1b給出了后驗置信度。
靠近門的位置概率較大,靠近墻處概率較小。注意分布具有三個尖峰,分別對應環境中三個完全相同的門。因此機器人并不知道自己在哪。相反,現在它有三個看起來同樣合理卻又不同的假設。我們發現機器人給不靠近門的位置也分配了正的概率。機器人在看到門這件事情上會犯錯但這是一個非常小的非零概率。保持低概率假設對于實現魯棒性是不可或缺的。
現在假定機器人是移動的。給出了運動對機器人置信度的影響。置信度沿運動方向移動,這反映了由機器人運動引入的不確定性。圖1.1d給出了觀察另一扇門后的置信度。這個觀察動作使這里的算法將大概率放在了一扇門附近的位置上,機器人現在相當確信自己在哪了。最后1.1e給出了機器人繼續沿著走廊運動的置信度。
這個例子闡明了概率范式。機器人感知問題用概率來描述,就是一個狀態估計問題。定位實例使用貝葉斯濾波算法來進行機器人定位空間上的后驗估計。信息表達方式是概率密度函數。函數的更新表示傳感器測量獲得了新的信息后機器人的不確定性也發生了變化。
概率算法不僅能計算機器人的瞬間不確定性,也能預知未來的不確定性,并在決定正確的控制選擇時,對未來不確定性進行考慮。海岸導航的例子,圖中給出了一個真實建筑物的二維地圖,將估計路徑與真實路徑進行比較,發現不是所有的軌跡所導致的不確定性水平都相同。圖所示的路徑引導通過相對空曠的空間,剝奪了能幫助機器人保持定位的特征。該軌跡尋找一個獨特的角落,為了保持定位貼近墻壁,這并不奇怪,因為后者路徑會減少不確定性,到達目標位置的機會更高些。
概率機器人將模型與傳感數據進行了無縫集成,同時克服了兩者的局限性;與傳統的機器人編程技術相比,概率方法在面對傳感器的局限和模型局限時魯棒性更強。
概率算法最經常被提到的兩個局限是計算復雜性和近似必要性,本質上比非概率算法效率低。因為它們考慮的是整個概率密度而不是單一的推測。幸運的是,不確定性有時可以用一個緊湊的參數模型(如高斯模型)很好地近似;另一方面,這樣的近似在使用中太過粗略,必須使用更復雜的表達。
(責任編輯:fqj)
-
傳感器
+關注
關注
2552文章
51377瀏覽量
755751 -
機器人
+關注
關注
211文章
28630瀏覽量
207963
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統」閱讀體驗】+初品的體驗
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
從市場角度對機器人的基本解讀

工業機器人常用的編程方式
ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
Al大模型機器人
如何使用PLC控制機器人
abb機器人movej和movel的區別
基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
國內機器人實際場景使用抽樣調查數據分析報告





 工商網監
工商網監
評論