") MIT新模擬系統(tǒng)訓(xùn)練自動駕駛汽車轉(zhuǎn)向和控制
MIT新模擬系統(tǒng)訓(xùn)練自動駕駛汽車轉(zhuǎn)向和控制
麻省理工學(xué)院的科學(xué)家創(chuàng)造了一種新的仿真系統(tǒng),他們發(fā)明了這種系統(tǒng)來訓(xùn)練具有無限轉(zhuǎn)向可能性的自動駕駛汽車。仿真系統(tǒng)的目標(biāo)是幫助自動駕駛汽車學(xué)習(xí)駕馭各種最壞情況的場景,然后才能在全國和世界的真實街道上自由行駛。目前自動汽車的控制系統(tǒng)在很大程度上依賴于來自人類駕駛員駕駛軌跡的真實數(shù)據(jù)集。
根據(jù)這些數(shù)據(jù),自動駕駛汽車可以學(xué)習(xí)模擬各種情況下的安全轉(zhuǎn)向和控制。來自危險邊緣案例(例如險些撞車或被迫離開道路)的真實數(shù)據(jù)很少。被稱為“模擬引擎”的計算機程序旨在通過渲染詳細(xì)的虛擬世界來模仿真實情況,以幫助訓(xùn)練自動駕駛系統(tǒng)從這些潛在情況中恢復(fù)。
麻省理工學(xué)院的研究人員已經(jīng)使用一種稱為虛擬圖像合成和自主轉(zhuǎn)換的擬真模擬器解決了該問題。該系統(tǒng)使用人類在道路上行駛時捕獲的少量數(shù)據(jù)集,來從軌跡上合成出幾乎無限的視點,以使車輛可以進入現(xiàn)實世界。
在這種擬真模擬器當(dāng)中,自動駕駛系統(tǒng)會因不發(fā)車禍的安全行駛而獲得獎勵,因此,它會自行學(xué)習(xí)如何安全地到達目的地,其中包括處理遇到的任何情況,包括在車道之間轉(zhuǎn)彎或從接近車禍中恢復(fù)后重新獲得控制。在測試中,MIT模擬器能夠安全地部署在一輛全尺寸的無人駕駛汽車上,并可以在以前看不見的街道上導(dǎo)航。
當(dāng)車輛處于模擬并接近遭遇各種車禍之前,自動駕駛系統(tǒng)能夠在幾秒鐘內(nèi)成功將汽車恢復(fù)到安全的行駛軌跡。麻省理工學(xué)院這項工作是與豐田研究所合作完成的。
-
模擬器
+關(guān)注
關(guān)注
2文章
875瀏覽量
43224 -
自動駕駛
+關(guān)注
關(guān)注
784文章
13812瀏覽量
166461
發(fā)布評論請先 登錄
相關(guān)推薦
AUTOSAR通信對自動駕駛的影響 AUTOSAR通信與嵌入式系統(tǒng)設(shè)計
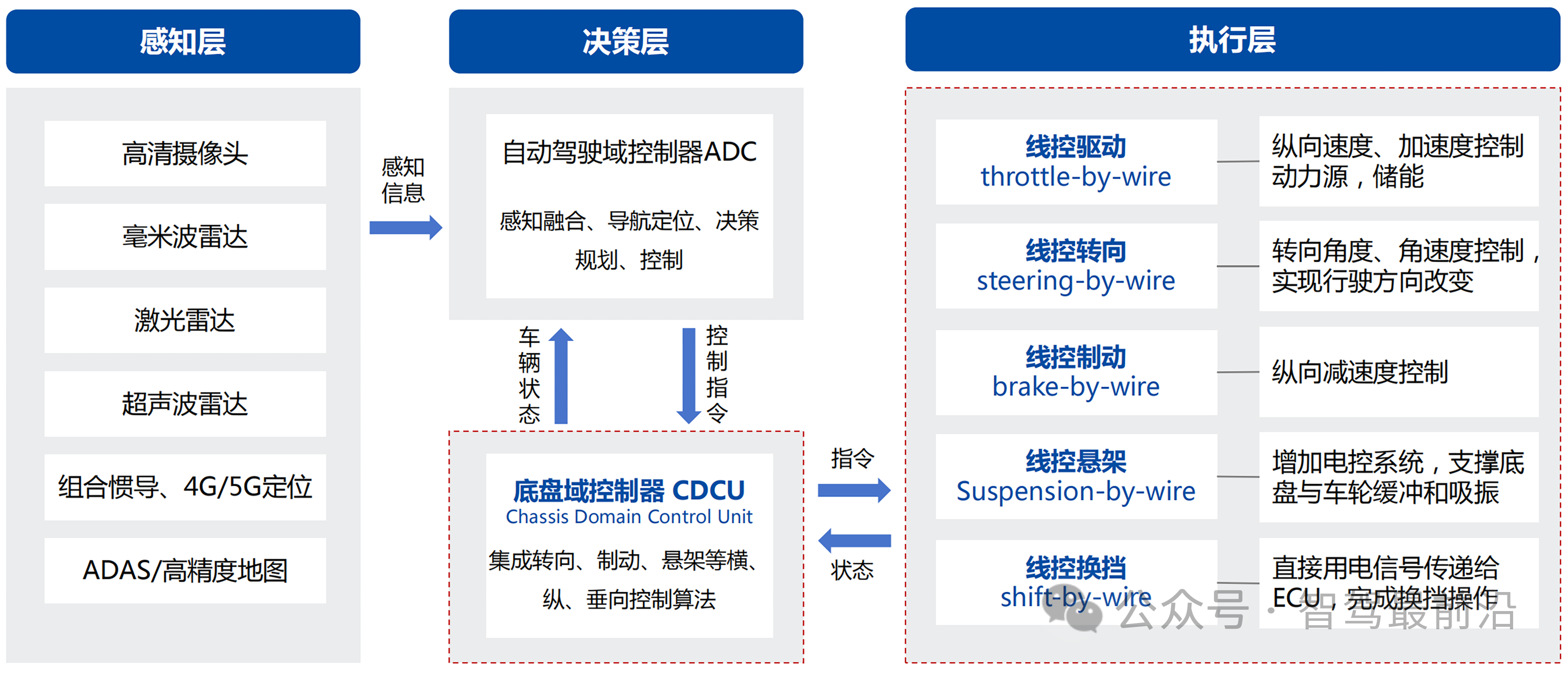
線控底盤如何讓自動駕駛加速奔跑?
標(biāo)貝科技:自動駕駛中的數(shù)據(jù)標(biāo)注類別分享

標(biāo)貝科技:自動駕駛中的數(shù)據(jù)標(biāo)注類別分享

MEMS技術(shù)在自動駕駛汽車中的應(yīng)用
PWM控制在自動駕駛汽車中的重要性
自動駕駛汽車安全嗎?

FPGA在自動駕駛領(lǐng)域有哪些優(yōu)勢?
FPGA在自動駕駛領(lǐng)域有哪些應(yīng)用?
自動駕駛汽車傳感器有哪些
揭秘自動駕駛:未來汽車的感官革命,究竟需要哪些超級傳感器?
如何提高自動駕駛汽車感知模型的訓(xùn)練效率和GPU利用率






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論