 PIC單片機之步進電機的工作原理及使用方法
PIC單片機之步進電機的工作原理及使用方法
大家好, 通過前一期的學習, 我們已經對ICD2 仿真燒寫器和增強型PIC 實驗板的使用方法及學習方式有所了解與熟悉,學會了如何用單片機來控制發光管、繼電器、蜂鳴器、按鍵、數碼管、RS232 串口等資源,體會到了學習板的易用性與易學性,看了前幾期實例,當你實驗成功后一定很興奮,很有成就感吧!現在我們就趁熱打鐵,再向上跨一步,一起來學習一下步進電機的工作原理及使用方法,這是我們用單片機來控制機械進行運動的開始。
步進電機是一種將電脈沖轉化為角位移的執行機構。當步進驅動器接收到一個脈沖信號,它就驅動步進電機就按設定的方向轉動一個固定的角度(步距角)。通過控制脈沖個數來控制角位移量,可以達到準確定位;同時可以通過控制脈沖頻率來控制電機轉動的速度和加速度,達到調速的目的;可以通過改變各相的通電順序,控制步進電動機的轉動方向。
步進電機的特點
1、步進電動機的角位移與輸入脈沖嚴格成正比,因此,它沒有累計誤差,具有良好的跟隨性。
2、步進電動機的動態響應快,易于啟停、正反轉及變速。
3、速度可在相當寬的范圍內平滑調節,低速下仍能保證獲得較大轉矩,因此,一般可以不用減速裝置而直接驅動負載。
4、步進電動機只能通過脈沖電源供電才能運行,它不能直接使用交流電源和直流電源。
那我們該如何來控制步進電機轉動呢?直流電機我們只要在電機兩極加上電壓,電機馬上轉動,但步進電機并非這樣,它是數字控制方式,它將電脈沖信號轉變成角位移,即給一個脈沖信號,步進電動機就轉動一個角度,因此非常適合單片機的控制。
一般一個完整的步進電機控制系統包括控制器、驅動器、電機三部分。框圖如圖1 所示:

圖1 步進電機控制系統
現在,我們以反應式步進電機為例,介紹其基本原理與應用方法。反應式步進電機可實現大轉矩輸出,步進角一般為1.5 度。反應式步進電機的轉子磁路由軟磁材料制成,定子上有多相勵磁繞組,利用磁極的變化產生轉矩。常用小型步進電機的實物如圖2 所示,該步進電機可以直接與我們的增強型PIC 實驗板相連,完成步進電機控制實驗。
圖2 步進電機實物圖
步進電機的勵磁方式。
步進電機的勵磁方式一般分為1 相勵磁、2 相勵磁、1-2 相勵磁。
1 相勵磁時,步進電動機按 方式循環通電,每次只對一相通電,磁場旋轉一周需要換相4 次,轉子轉動一個齒距角。其通電方式最為簡單,轉矩最小。勵磁方式見表1。
方式循環通電,每次只對一相通電,磁場旋轉一周需要換相4 次,轉子轉動一個齒距角。其通電方式最為簡單,轉矩最小。勵磁方式見表1。
表1 1相勵磁方式
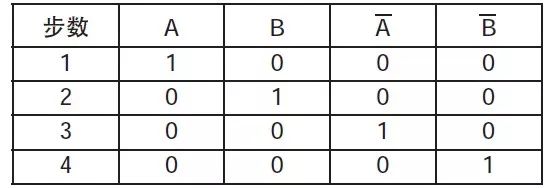
2 相勵磁時,每次對兩相同時通電,磁場旋轉一周需要換相4 次,轉子轉動一個齒距角。在雙三拍工作方式中,步進電動機正轉的通電順序為: ;反轉的通電順序為:
;反轉的通電順序為:
。雙三拍工作方式的優點是:
可產生較大的轉矩,不易產生失步。勵磁方式見表2。
表2 2相勵磁方式
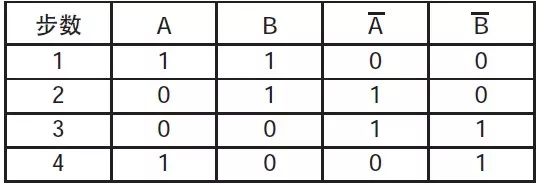
1-2 相勵磁是1 相勵磁和2 相勵磁交替使用的方法。磁場旋轉一周需要換相8 次,轉子才轉過一個步距角,屬于半步的方式,也就是說1-2 相勵磁時的步距角比前兩種方式的步距角小一半,所以步進精度提高了一倍。1-2 相勵磁方式見表3。
表3 1-2相勵磁方式
步進電機應用驅動電路
步進電機的驅動電路有單極性直流驅動和H 橋驅動兩種,本例的小型步進電機,采用最簡單的單極性直流驅動電路,目的在于驗證步進電機的使用,在正式工業控制一般較之復雜。簡單驅動電路如圖3所示。
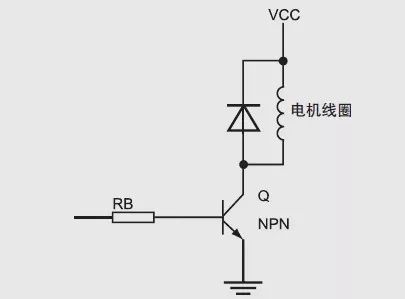
圖3 步進電機的單極性直流驅動電路
在實際應用中一般驅動路數不止一路,用圖3的分立電路體積大,各路參數一致性難以保障。最好用現成的集成電路作為多路驅動。常用的小型步進電機驅動電路可以用ULN2003 或ULN2803。我們的實驗板上用的是ULN2003。ULN2003 是高壓大電流達林頓晶體管陣列系列產品,具有電流增益高、工作電壓高、溫度范圍寬、帶負載能力強等特點,適應于各類要求高速大功率驅動的系統。
ULN2003A 由7 組達林頓晶體管陣列和相應的電阻網絡以及鉗位二極管網絡構成本例實際只用其中4組。ULN2003 內部結構如圖4 所示,達林頓晶體管等效電路圖如圖5 所示。
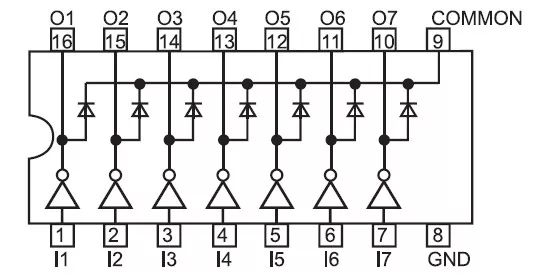
圖4 ULN2003內部結構圖
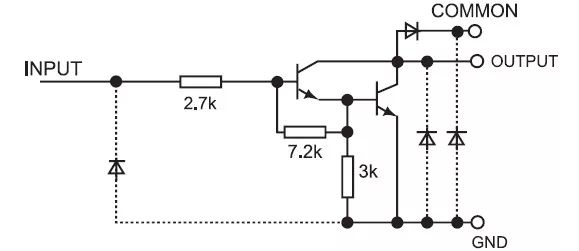
圖5 達林頓晶體管等效電路圖
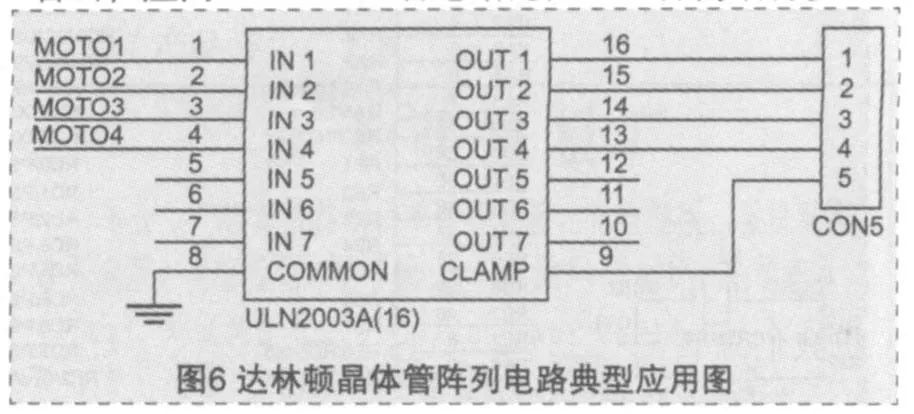
ULN2003A 型高壓大電流達林頓晶體管陣列電路的典型應用電路框圖如圖6 所示。鉗位二極管用于保護線圈通斷時的反電動勢擊穿集成電路,可以看出,應用ULN2003 后電路比分立元件簡潔得多。
通過前文的原理介紹,我們已經對步進電機的特性以及工作原理有了大致地了解,但當我們拿到一個步進電機時要正確地應用它還是一時不知如何下手,比如我們現在要控制電機正轉、反轉、高速運轉、低速運轉時,需要怎么辦呢?要控制步進電機進行正反轉,已不是像直流電機這么簡單,在電機兩端加上正反相電源就可以了,而是通過輸出不同規律的“正反轉”時序脈沖來實現控制。現在,我們來一起看一下如何進行步進電機正反轉以及轉動速度的控制,通過一個實例,相信會給大家帶來一個感性的認識。
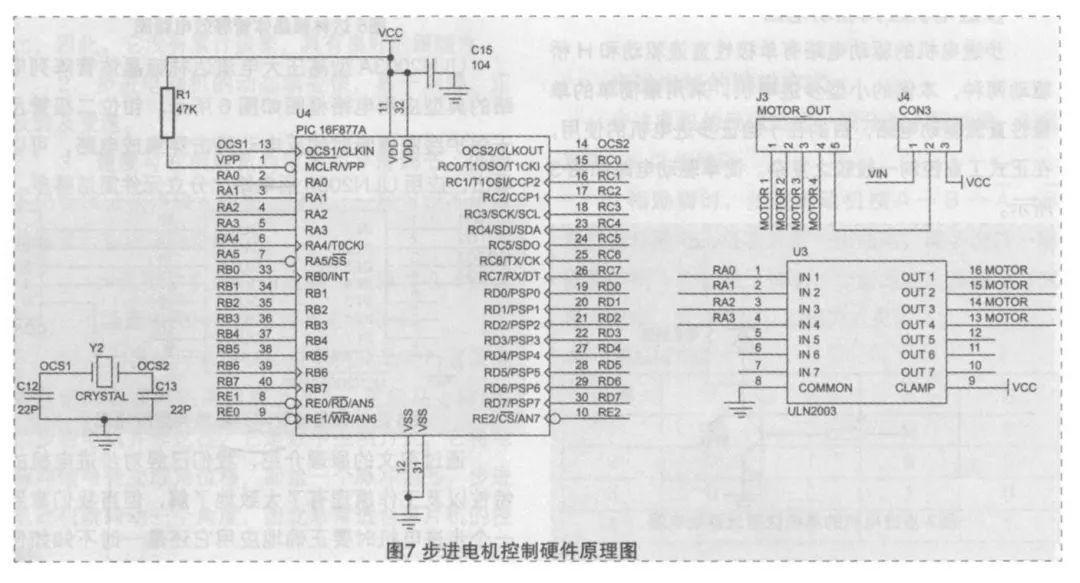
首先,我們來看一下增強型PIC 實驗板上的步進電機控制電路,因為我們需要將軟件和硬件相結合進行考慮如何來編程。步進電機控制部分的電路原理圖如圖7 所示。PIC 單片機的RD0~RD3 為電機脈沖輸出引腳,通過ULN2003 集成芯片來驅動小型步進電機,我們只要將步進電機的插頭,直接插在板子J3 插座處即可。跳線J4 為我們為實驗板設計的步進電機智能供電跳線,這樣實驗板可以適用于不同工作電壓的步進電機,當跳線跳到VCC 這端,則給步進電機提供VCC +5V 的電源,我們現在做實驗使用的步進電機工作電壓是5V 的,所以我們跳線設置到VCC 這一端即可,如果用戶使用自己的步進電機電壓不是5V 的,那可以將跳線跳到VIN 這一端,即用戶外部接入電源提供給步進電機工作電壓。
對于單片機軟件的編程,我們使用MPLab IDE軟件來進行C 語言編程,它是我們的編程環境,同時我們可以通過使用ICD2 仿真燒寫器和增強型PIC實驗板連接進行程序的仿真調試和燒寫步驟,具體的操作步驟,我們已經在前幾期做了詳細的說明和介紹,在此就不再重復說明,讀者朋友可以參閱以前的文章或直接登陸我們的網站查看資料。現在我們可以輸入程序代碼進行調試了,我們在MPLabIDE 軟件中新建工程,加入源程序代碼,同時進行芯片型號的選擇和配置位的設置,我們實驗所用的芯片型號為PIC16F877A。編寫的程序代碼如下:
/* 步進電機演示程序 */
#include
#define key RB0
void delay(void)
{
int k;
for(k=0;k<2000;k++);
}
void main()
{
TRISD=0x00; // 設置RD 為輸出口
TRISB=0xFE;
// 設置RB0 為輸出口,RB1~RB7 為輸入口
PORTD=0x00; // 初始化RD 輸出低電平
key=1; // 設置按鍵為輸入狀態
while(1) // 主循環
{
if(key==1) // 如果沒有鍵按下則電機正轉
{
PORTD=0xFC; //1100
delay();
PORTD=0xF6; //0110
delay();
PORTD=0xF3; //0011
delay();
PORTD=0xF9; //1001
delay();
}
else // 如果有鍵按下則電機反轉
{
PORTD=0xFC; //1100
delay();
PORTD=0xF9; //1001
delay();
PORTD=0xF3; //0011
delay();
PORTD=0xF6; //0110
delay();
}
}
}
編好程序后,讀者朋友可以將編譯好的HEX通過ICD2 仿真燒寫器燒入單片機芯片,然后插上步進電機,上電運行,如圖8 所示。這時我們可以看到步進電機已經開始正轉起來,如果我們這時按下K2 按鍵,則步進電機開始反轉,如果釋放了K2按鍵,那么步進電機仍然繼續正轉,從而實現了步進電機正反轉的控制。
圖8 步進電機與增強型PIC實驗板進行連接
前面,我們輸入了這么長一段程序后,作為初學者的讀者一定對有些語句會有點疑問,下面我們就來一起結果實際,看一下一些關鍵程序語句的作用。
#include
看到這里,相信你現在已經可以對步進電機進行基本控制了,步進電機的原理與使用我們講到這里,接下來幾期,我們將繼續一起學習增強型PIC實驗板的其它各部分資源的原理與使用,使你對單片機應用的各方面知識都有所入門與提高。
-
單片機
+關注
關注
6040文章
44592瀏覽量
636886 -
PIC
+關注
關注
8文章
507瀏覽量
87677 -
步進電機
+關注
關注
151文章
3115瀏覽量
147649
原文標題:PIC單片機之步進電機
文章出處:【微信號:changxuemcu,微信公眾號:暢學單片機】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
什么是步進電機?它的工作原理是什么?

步進電機的工作原理介紹


步進電機的類型及工作原理





 工商網監
工商網監
評論