 使用單片機控制微型打印機的資料詳細概述
使用單片機控制微型打印機的資料詳細概述
1引言
由于常用的微型針式打印機的速度慢,噪聲大,無法滿足某些場合的需要。微型熱敏打印機具有打印速度快、噪音低、可靠性高、字跡清晰、機頭小而輕等優點,可滿足各種場合的打印要求,因此得到廣泛應用。筆者在汽車行駛記錄儀的開發過程中,根據廠家要求,選用較為先進的熱敏打印機作為打印設備。但微型熱敏打印頭對打印時序和溫度要求較高,一旦控制不當極易造成打印頭燒毀。因此,在有合理的硬件設計的基礎上,軟件設計也十分重要。本文使用某些軟件設計替代了部分硬件電路,使打印機的控制電路得到了簡化。
介紹了基于89S51單片機的微型熱敏打印機的組成,分析了打印原理,詳細給出了整體流程以及各個功能模塊的軟件設計。熱敏打印頭采用I/O口模擬串行數據傳輸實現數據加載。設計的微型熱敏打印機運用于實際,取得了良好的效果。
2 打印原理
選用的FTP-628作為熱敏打印頭。該熱敏打印頭點結構384點/行,水平方向點密度:8點/mm,垂直方向行間距:8點/mm。有效打印寬度48mm。打印速度最大為60mm/秒[1]。
要打印的數據在時鐘CLK的配合下,經由數據輸入腳DI移到熱敏機芯內部的移位寄存器中。經384個時鐘周期,一行384位數據全部移到移位寄存器后,鎖存端的鎖存信號/LAT由CPU置低,移位寄存器的數據被鎖存到鎖存器。然后熱敏頭加熱控制信號STB產生高電平,此時根據384點輸入的DI數據是1或者是0決定發熱元件是否發熱,由此在熱敏紙上產生要打印的點行。
3 系統整體框圖
本文介紹的微型熱敏打印機由主控芯片、步進電機驅動模塊、熱敏打印頭過熱保護模塊、熱敏打印頭缺紙檢測模塊、RS-232通信模塊、供電模塊等部分組成。其中步進電機驅動模塊負責控制打印紙走紙及走紙速度;熱敏打印頭過熱保護模塊防止熱敏打印頭溫度過高損壞;熱敏打印頭缺紙檢測電路完成熱敏打印頭是否有紙檢測;RS-232通信模塊實現打印機與上位機之間的通信;供電模塊給控制電路及熱敏打印頭供電。根據實際需要,考慮成本,選擇89S51單片機作為主控芯片[2]。如圖1,給出了主控芯片與各個模塊之間的接口功能設計。
圖1 主控芯片與功能模塊的接口設計
4 系統軟件設計
4.1 整體流程
如圖2,給出了整個系統工作的軟件流程圖。本熱敏打印機的軟件設計主要是通過RS-232通信模塊接收由主機傳來的數據。當接收到數據時,首先要判斷是命令字還是字符 數據。如果是命令字,則打印機按照命令動作;如果判斷為字符數據,則從字庫中提取字符點陣,按行打印,走紙。
圖2 系統工作流程圖
4.2 數據加載與印字
將內存緩沖區的數據輸出到熱敏打印頭的移位寄存器中,可以通過硬件方式和軟件移位的方式實現[3]。本打印機實現方案采用的是后者。一般情況下,軟件移位是由I/O口模擬串行數據傳輸時序。圖3為I/O口實現數據移位流程圖。P1.0口模擬時鐘CLOCK,P1.1口在CLOCK的配合下輸出數據DATA,輸出數據到熱敏打印頭內部的移位寄存器中。
P2[0:5]分別與打印頭內部的加熱選通信號STB[0:5]相連接。當數據全部移入到移位寄存器后,對STB[0:5]操作,加熱印字。由于熱敏打印機是通過打印頭加熱后在熱敏打印紙上灼燒印字,所以,加熱時間的長短決定了印字的清晰與快慢。因此,根據實際情況,合理的設計加熱時間對于實現熱敏打印機的高質量打印十分重要。
圖3 I/O口實現數據移位流程圖
4.3 步進電機走紙及驅動
圖4 I/O口模擬輸出PWM的時序圖
設計的熱敏打印機內部的二相四拍步進電機控制打印頭的走紙及走紙速度。由2路I/O口模擬2路PWM輸出,再經過兩個非門,將輸出的2路模擬PWM波形轉換為4路,輸入步進電機驅動器,驅動步進電機[4]。圖4為P1.2與P1.3口模擬輸出PWM的時序圖。在一個周期內,P1.2較P1.3延時3/4個周期。
4.4 保護與中斷
熱敏打印頭加熱時間一般為1ms,連續加熱超過1s后,很容易燒毀、損壞熱敏頭,所以實際的熱敏打印機必須對熱敏打印頭添加過熱保護電路。當熱敏打印頭溫度過高時,過熱保護模塊輸出一個低電平到/INT0腳,使打印機進入中斷[3]。圖5為過熱保護中斷流程圖。進入中斷后,主控芯片斷開熱敏打印頭加熱供電控制繼電器,停止熱敏打印頭的加熱供電,并暫停其他動作。當熱敏打印頭溫度降低后,則過熱保護模塊輸出一個高電平到/INT0腳,此時,打印機延時一段時間后出中斷。
熱敏打印頭內部用光電繼電器作為傳感器,檢測打印頭是否有紙。當熱敏打印頭無紙時,傳感器中的發光二極管發出的光束無法經由打印紙反射到光敏三極管上,光敏三極管由此而無法導通,經過外部電路后,/INT1為低電平,進入中斷。反之,/INT1為高電平,工作正常。其中斷流程與過熱保護中斷類似。
圖5 過熱保護中斷流程圖
4.5 字符庫的構造與提取
由于本打印機是應用于汽車行駛記錄儀的專用打印機,按照汽車行駛記錄儀的要求,約需使用100個左右的漢字以及26個大寫英文字母以及10個阿拉伯數字,為降低字庫對硬件存儲空間的要求,采用自定義的字符庫。另外,自定義的字符庫靈活性較強,在自定義字庫中,這樣既可以在同等打印寬度的情況下實現靈活打印,也可以使打印出來的字符效果美觀。提取字符點陣時,首先判斷字符類型,再尋得要打印字符的首地址,按照該字符的點陣規范,從字庫中取出打印點陣放入緩沖區,進而加載,并打印。
5 結束語
本文使用軟件實現了熱敏打印機的運行控制。實驗證明,微型熱敏打印機在實時性要求不高的諸多場合能正常運行,驗證了設計方案的合理性。而對于實時性要求高、成本并不敏感的打印環境,則應該引入實時操作系統,實現對打印機的實時操作。
本文創新點:為簡化硬件電路,采用軟件移位實現數據加載,通過軟件產生步進電機所需的 PWM驅動信號;為減小打印機對存儲空間的需求,針對汽車行駛記錄儀使用字符少的特點,設計了自定義的字符庫。
下面還介紹一個
摘要:在分析M-164微型打印機控打原理的基礎上,設計了以89C52為核心的漢字微型打印機,介紹了主要的硬件構成及主要的控打軟件。這種微型打印機是儀器儀表的重要輸出設備。
關鍵詞:單片機;打印控制;并行接口;存貯器
1引言
由于單片機具有簡單實用、高可靠性、良好的性能價格比以及體積小等優點,已經在各個技術領域得到了迅猛發展。本文著重介紹89C52對并行接口的微型打印機的控制,以便更好地了解和掌握單片機對外部接口的一般和一些特殊功能的應用。
2控制打印原理
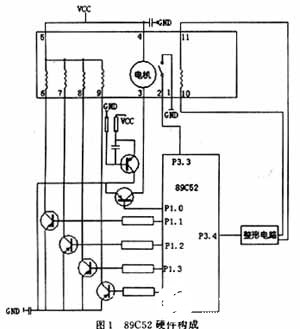
89C52單片機執行程序存貯器中的程序,控制電機帶動滑槽輪及蝸桿轉動[1],使打印機的機頭滑架左右移動,從而不斷改變同一點行上的打點位置。蝸桿的轉動一方面通過凸輪帶動走紙機構實行走紙,另一方面驅動色帶移動。電機轉動時感應線圈有一個3 V的正弦信號,經過整形電路后成為方波,此方波輸入到89C52,經過89C52相應的指令檢測此方波的變化時刻(從上升沿變到下降沿或者從下降沿變到上升沿時刻),在方波變化時刻使打印機的相應打針進行沖打,完成打印任務,同時由這個方波的變化確保各打印點之間的距離相等。當機頭滑架到達最左邊時,磁鐵使干簧管閉合,這時單片機送出一負脈沖作為行同步信號,使每行打印時在最左端對齊。
3硬件組成
3.1驅動電路
用89C52的P1口的P10~P14分別控制打印機的電機及打印針頭,P3.3控制干簧繼電開關,當滑架到達最左端時,電機每轉一圈,干簧繼電開關閉合一次,P3.3就接地一次發出一負脈沖作為同步信號,以保證打印時每行在最左端對齊。在以前眾多微型打印機中,由于應用三極管的拉電流,當單片機上電復位時P1口的初始狀態為輸入方式,所以P10~P17均為高電平,如果沒有一個非門[2],則單片機上電復位時就會使組成功率放大器(由2個NPN管構成)的三極管導通,從而使電機轉動和4個打針同時通電,這是不允許的。在這里使用灌電流足以驅動電機和打針,故不需非門,如圖1所示。
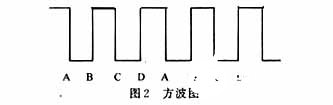
電機轉動時,感應線圈輸出幅值為3 V的正弦波,經10,11兩端子送出到晶體管整形為方波后送入P3.4,P3.4檢測此方波作為打印同步信號,以確保打印點之間距離相等。4只打針循環同步情況如圖2所示。由圖2可知:A,C打針是在方波下降到來時刻沖打,B,D打針在方波上升到來時沖打。
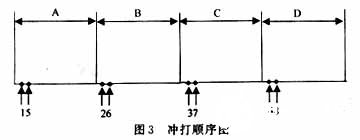
4只打針A,B,C,D在滑架上從左到右水平安裝,間隔24個點位。在打印每行96個點時,他們同時移動。次序依次通電激勵,每打1點,滑架右移1/4點位,4只打針打完正好移動1個點位。沖打1點行,滑架連續移動24點位。沖打順序如圖3所示。
打印機工作時的程序如下:
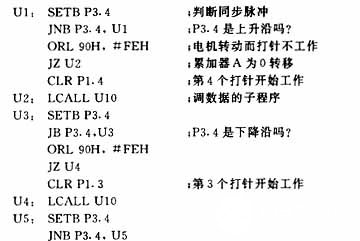
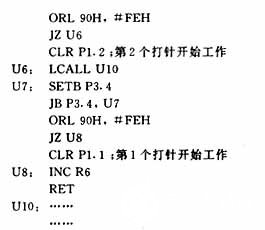
3.2基本系統
由于微型打印機的打印緩沖區一次可快速裝入240個代碼,如全部為漢字,則要占用RAM為240×32=7 650個字節,顯然89C52內的256 B[3]RAM明顯不夠,所以要外掛1片數據存貯器(這里用的是6116)才能滿足要求。基于這些,他的基本系統由89C52芯片,27C040(27C040并不是作為程序存貯器使用,而是用來存放字庫、字符),數據存貯器(6116)構成,如圖4所示。
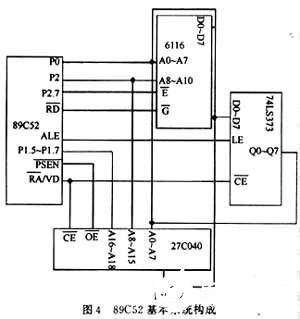
由于27C040只有1片,所以其片選線與地址鎖存器(74LS373)的片選線均直接接地。同時外接的27C040的地址線A0~A7由P0口通過地址鎖存器提供,A8~A15由P2口提供,A16~A18由P1.5~P1.7提供。而數據存貯器(6116)片選端CE是由89C52的P2.7控制的,當P2.7=0時則選中6116,此時89C52的P2.0~P2.2輸出6116所需的高位地址,P0口輸出6116的低8位地址鎖存在鎖存器74LS373中。若是讀6116,則P0口變為輸入方式,在RD為低電平時,選通6116,此時6116中相應的數據出現在P0口,再由CPU讀入累加器A中。若是寫,則P0口為輸出,當 為低電平時,將累加器A中出現在P0口上的數據寫入6116。
為低電平時,將累加器A中出現在P0口上的數據寫入6116。
3.389C52對打印機聯絡信號的控制
3.3.1打印機的聯絡信號
打印機的聯絡信號有 ,
, ,BUSY。
,BUSY。
:數據選通觸發脈沖,輸入。此信號上升沿時數據線上8位數據被打印機讀入機內鎖存。
:回答脈沖,輸出。當其為“低”電平時表示數據已被接收而且打印機準備好接收下一個數據。
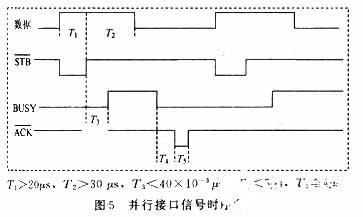
BUSY:“忙”信號,為狀態輸出線,當打印機在打印字符、執行命令期間BUSY=1,表示打印機處于“忙”狀態,這時打印機通知主機,他處于“忙”之中而不能接收數據,此時主機不能使用信號向打印機送入新的數據字節。當打印機打完一個字符后,BUSY=0,同時他產生信號通知主機,準備接收下一個數據,當主機接收到BUSY=0時,主機向打印接口輸出1 B到D0~D7,并發出低電平信號,當打印機收到STB低電平信號后,單片機在其上升沿時讀入數據。其時序圖[4]如圖5所示。
3.3.289C52對聯絡信號實施控制的電路電路圖如圖6所示。
上電復位時D觸發器(U1)的Q輸出端為1,無論P3.0為何值,經過“或”門(6)后,BUSY=1,不接收數據。
當89C52的P2.7=0時,即有6116(數據存貯器)的CE為低電平,表示選中了6116,由圖3可知當P2.7=0時,經過反相器(3)再經過“或”門(8),此時無論P3.7為何值74ALS374的片選端CE總為高電平,即沒有選中,這樣就保證了外部的數據與數據存貯器的數據分別進行傳輸與接收而不至發生混亂。從上面的分析,當P2.7=0時,表示選中了6116,而沒
有選中74ALS374,此時主機不應有數據送入打印機,即有BUSY=`,=1,下面來看是否滿足這點:當P2.7=0時,經過反相器(3)一路經D觸發器(U2)的Q輸出為1即=1,另一路經過“或”門(8),這時無論P3.7為何值,輸出總為1,再經D觸發器(U1)的Q輸出也為1,經“或”門(6)后,BUSY=1,顯然滿足要求。
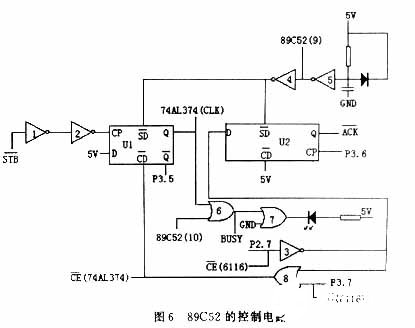
當P2.7=1時,通過“非”門(3)后變為0,若此時單片機準備讀取數據(即P3.7=0),他們經過“或”門(8)后,一路到74ALS374的片選端(CE),一路到D觸發器(U1)的清除端,使D觸發器的Q輸出端為0,即有74ALS374(CLK)為0,表示74ALS374的D0-D7端已有數據(同時 ,即P3.5=1,,這樣通過檢測單片機的P3.5就可知道是否有數據輸入),此時若89C52的P3.0=0,經過“或”門(6)后輸出為0,即BUSY=0,又由于P2.7經過“非”門(3)后為0,他輸出到D觸發器(U2)的D端,當P3.6(
,即P3.5=1,,這樣通過檢測單片機的P3.5就可知道是否有數據輸入),此時若89C52的P3.0=0,經過“或”門(6)后輸出為0,即BUSY=0,又由于P2.7經過“非”門(3)后為0,他輸出到D觸發器(U2)的D端,當P3.6( )從低電平變為高電平時使D觸發器(U2)的Q輸出端為0即=0,這時當主機發出脈沖時,在脈沖上升沿到來時打印機開始從74ALS374中讀入數據。
)從低電平變為高電平時使D觸發器(U2)的Q輸出端為0即=0,這時當主機發出脈沖時,在脈沖上升沿到來時打印機開始從74ALS374中讀入數據。
4軟件設計
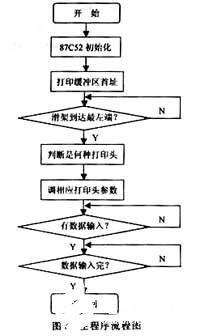
系統控制軟件主要包括:主程序、打印機是否在線的子程序、判斷是何種機型的子程序、判斷滑架到達最左端的子程序、讀取數據的子程序和走紙與打印的子程序等,其主程序流程框圖如圖7所示,其他子程序由于篇幅所限,在此不再詳細介紹。
-
單片機
+關注
關注
6037文章
44558瀏覽量
635235 -
寄存器
+關注
關注
31文章
5343瀏覽量
120348 -
打印機
+關注
關注
10文章
771瀏覽量
45681
發布評論請先 登錄
相關推薦
淺談點陣打印機的功能特點


激光打印機好還是噴墨式打印機好
3D打印機優化:ARMxy嵌入式計算機的作用

光墨打印機是什么_光墨打印機為何不能普及
桌面運維工具之打印機驅動安裝

如何選用RFID標簽打印機
Klipper固件的打印機可以插卡打印嗎?
藍牙打印機解決方案
canon打印機怎么用
條形碼標簽和條碼打印機哪個好?






 工商網監
工商網監
評論