 實操:KUKA機器人創建工具坐標數據
實操:KUKA機器人創建工具坐標數據
使用機器人示教器設定工具
機器人控制系統通過測量工具(工具坐標系)識別工具頂尖(TCP--Tool CenterPoint,工具中心點)相對于法蘭中心點的位置,TCP的測量有兩種途徑:一種是找個固定的參考點進行示教,另一種則是已知工具的各參數,就可以得到相對于法蘭中心點的X、Y、Z的偏移量,相對于法蘭坐標系轉角(角度A、B、C),同樣也能得出精確的TCP。
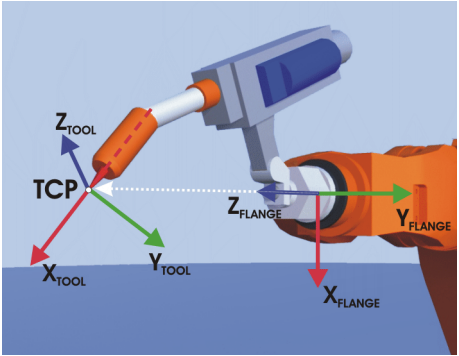
圖8-8
通過一個固定參考點的工具坐標系的測量分為2步:首先確定工具坐標系的TCP點,然后確定工具坐標系的姿態如表8-7所示。
表8-7 TCP的測量的步驟
| 步驟 | 說明 |
| 1 |
確定工具坐標系的TCP點 可選擇以下方法: *XYZ 4 點法 *XYZ 參照法 |
| 2 |
確定工具坐標系的姿態 可選擇以下方法: *ABC 2 點法 *ABC 世界坐標法 |
1. TCP點的測量
1)XYZ4點法
XYZ4點法的原理:將待測工具的TCP從4個不同方向移向任意選擇的一個參考點,機器人系統將從不同的法蘭位置值計算出TCP,如圖8-9所示。
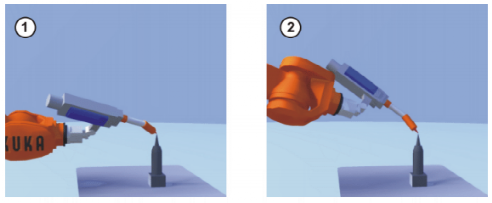
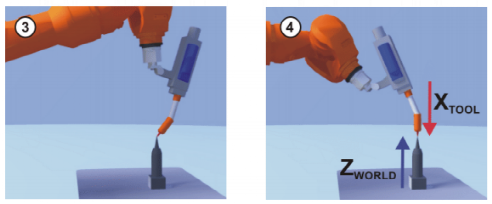
圖8-9 XYZ4點法
其具體操作步驟如下:
1. 選擇菜單序列 投入運行 > 測量 > 工具 > XYZ 4 點。
2. 為待測量的工具給定一個號碼和一個名稱。用繼續鍵確認。
3. 用TCP移至任意一個參照點。按下“測量”,對話框“ 是否應用當前位置?繼續測量” 用“是”加以確認
4. 用TCP從其他方向朝參照點。重復步驟3次。
5. 負載數據輸入窗口自動打開,正確輸入負載數據,然后按下“繼續”按鈕。
6. 包含測得的 TCP X、Y、Z 值的窗口自動打開,測量精度可在誤差項中讀取。數據可通過保存直接保存。
2)XYZ參照法
采用 XYZ 參照法時,將對一件新工具與一件已測量過的工具進行比較測量。機器人控制系統比較法蘭位置,并對新工具的TCP進行計算。如圖7-10所示。
圖8-10
其具體操作步驟如下:
1. 前提條件是,在連接法蘭上裝有一個已測量過的工具,并且TCP的數據已知。
2. 在主菜單中選擇投入運行 > 測量 > 工具 > XYZ 參照。
3. 為新工具指定一個編號和一個名稱。用“繼續”鍵確認。
4. 輸入已測量工具的TCP數據。用“繼續”鍵確認。
5. 用 TCP 移至任意一個參照點。點擊測量。用“繼續”鍵確認。
6. 將工具撤回,然后拆下。裝上新工具。
7. 將新工具的TCP移至參照點。點擊測量。用“繼續”鍵確認。
8. 按下保存鍵。數據被保存,窗口自動關閉。
2. 確定工具坐標系的姿態/朝向
確定工具坐標系的姿態/朝向的方法主要有ABC 世界坐標法和ABC 2點法兩種。
1)ABC世界坐標法
ABC世界坐標法是將工具坐標系的軸調整為與世界坐標系的軸平行。機器人控制器從而得知TOOL坐標系的取向,如圖8-11所示。
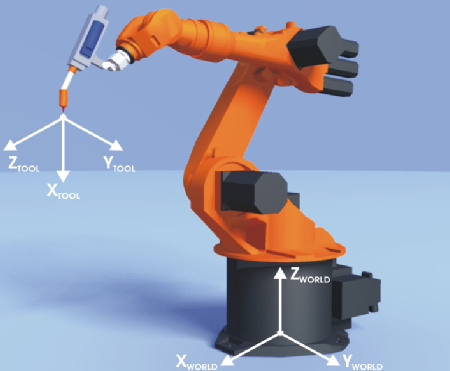
圖8-11 ABC世界坐標法
此方法有兩種方式:
n5D: 用戶將工具的作業方向告知機器人控制系統。作業方向默認為X軸。其他軸的取向將由系統確定,用戶對此沒有影響力。系統總是為其它軸確定相同的取向。如果之后必須對工具重新進行測量,比如在發生作業后,僅需要重新確定作業方向。而無需考慮作業方向的轉度。應用范圍:例如:MIG/MAG 焊接,激光切割或水射流切割。
n6D:用戶將所有三個軸的取向告知機器人控制系統。應用范圍:例如:焊鉗、抓爪或粘膠噴嘴。
其具體操作步驟如下:
如果不是通過主菜單調出操作步驟,而是在TCP測量后通過 ABC 2點按鍵調出,則省略下列的兩個步驟。
1. 在主菜單中選擇投入運行 > 測量 > 工具 > ABC 世界。
2. 輸入工具編號。用“繼續”鍵確認。
3. 在 5D/6D 欄中選擇一種規格。用“繼續”鍵確認。
4. 如果選擇 5D:
將 +XTOOL調整至平行于-ZWORLD的方向。(+XTOOL=作業方向)
如果選擇 6D:
按下列方法進行工具坐標系統的軸的調整。
使 +XTOOL與-ZWORLD 平行。(+XTOOL=作業方向)
n+YTOOL 與 +YWORLD 平行
n+ZTOOL 與 +XWORLD 平行
5. 按下“測量”鍵來確認。對信息提示“要采用當前位置嗎?測量將繼續”按下“是”鍵來確認。
6. 隨即打開另一個窗口。在此輸入負荷數據。
7. 然后按“繼續”和“保存”結束此過程。
8. 關閉菜單。
2)ABC 2點法
ABC 2點法是指通過趨近X軸上一個點和XY平面上一個點的方法,機器人控制系統即可得知工具坐標系的各軸。當軸方向必須特別精確地確定時,將使用此方法,如圖7-12所示。

圖7-13 ABC 2點法
其具體操作步驟如下:
如果不是通過主菜單調出操作步驟,而是在TCP測量后通過ABC 2點按鍵調出,則省略下列的兩個步驟。
1. 前提條件是,TCP已通過XYZ法測定。
2. 在主菜單中選擇投入運行 > 測量 > 工具 > ABC 2 點。
3. 輸入已安裝工具的編號。用“繼續”鍵確認。
4. 用TCP移至任意一個參照點。點擊測量。用“繼續”鍵確認。
5. 移動工具,使參照點在X軸上與一個為負X值的點重合(即與作業方向相反)。點擊測量。用“繼續”鍵確認。
6. 移動工具,使參照點在 XY 平面上與一個在正Y向上的點重合。點擊測量。用“繼續”鍵確認。
7. 按“保存”。數據被保存,窗口關閉。或按下負載數據。數據被保存,一個窗口將自動打開,可以在此窗口中輸入負載數據。
3. 數字輸入
當已知工具的各參數,就可以直接輸入相對于法蘭中心點的X、Y、Z的偏移量,相對于法蘭坐標系轉角(角度A、B、C)。
其具體操作步驟如下:
1. 在主菜單中選擇投入運行 > 測量 > 工具 > 數字輸入。
2. 為待測量的工具給定一個號碼和一個名稱。用“繼續”鍵確認。
3. 輸入工具數據。用“繼續”鍵確認。
4. 輸入負載數據。
5. 按“繼續”確認,按下“保存”鍵,數據被保存。
-
控制系統
+關注
關注
41文章
6637瀏覽量
110690 -
機器人
+關注
關注
211文章
28520瀏覽量
207528
原文標題:實操:KUKA機器人創建工具坐標數據
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
發那科ROBOGUIDE機器人仿真助手入門

【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
《具身智能機器人系統》第10-13章閱讀心得之具身智能機器人計算挑戰
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統」閱讀體驗】+數據在具身人工智能中的價值
ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
Al大模型機器人
abb機器人常用指令大全
工業機器人仿真軟件有哪些

基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
KUKA C4/C58.6以上系統的工具/基坐標管理窗口






 工商網監
工商網監
評論