 機器人焊接工裝夾具設計方案
機器人焊接工裝夾具設計方案
自動化趨勢背景下,很多結構工件的焊接加工等工作都利用機器人或者機械臂來完成,視頻中的車身就同時使用了多個機械臂進行焊裝加工,帶來的效率提升自然不言而喻。對于企業來說有面臨由手工向自動化焊接轉型的需要,或者是現有的自動焊接方式不夠完善,其中涉及到的夾具問題,今天就用兩個專利方案來向大家說明。 1. 搬運車車架機器人自動焊接夾具針對問題: 目前對搬運車車架的焊接與搬運主要采用手工焊接和人工搬運為主。而現有的手工搬運對于自動化焊接存在諸多不足,已越來越不適應行業的發展,嚴重影響焊接質量和生產效率。
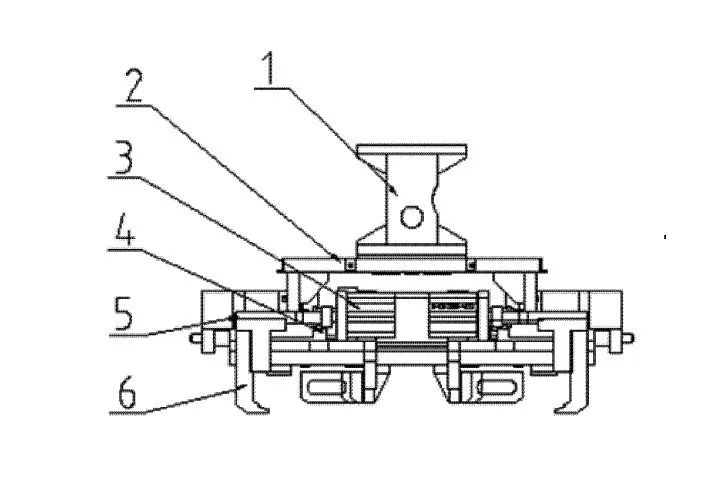
圖 1 1.轉接座2.夾具大底板3.氣缸4.直線導軌 5.氣缸推桿6.工件夾緊塊 技術方案: 車架機器人搬運焊接夾具,采用氣動夾緊直線導軌導向方式,產品規格調整時,更換調整搬運夾具中氣動插銷和氣動壓板的位置,即可適應工件調整,滿足多種規定尺寸內工件焊接的要求。具體結構為如圖1在轉接座1上裝有夾具大底板2,大底板上裝有氣缸3和直線導軌4作為驅動和導向,氣缸推桿5前端裝有工件夾緊塊6、工件外形定位銷7,并通過轉接座1與搬運機器人連接。
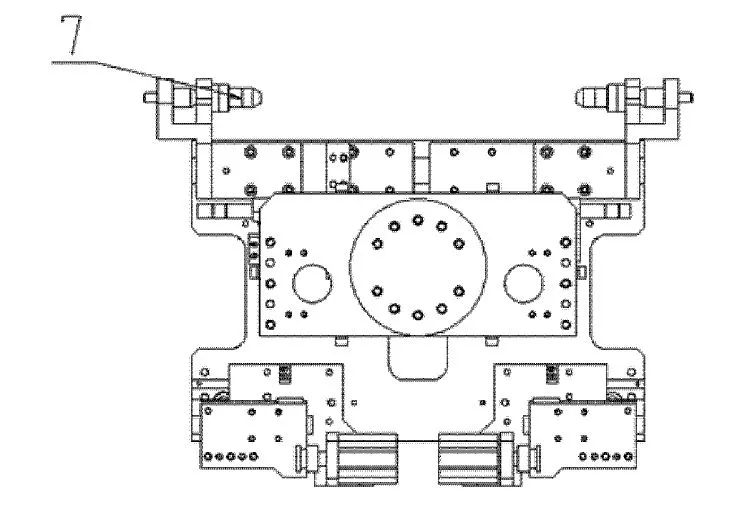
圖2 機器人搬運焊接夾具俯視圖 7.工件外形定位銷技術特點:此搬運車車架機器人搬運焊接夾具,用于搬運機器人上,配合弧焊機器人焊接,以達到搬運車整個車架的焊接,從而實現自動化焊接,有效提高機器人對工件的自動燁接效率和焊接質量。 2.自動焊接翻轉夾具針對問題: 現有的焊接翻轉夾具可以夾持工件并與機器人配合作業進行焊接翻轉,但仍有一些缺點,例如:不具有通用性(工作臺規格尺寸固定)、安全性能低(氣動系統中氣管外露)、夾具翻轉的平穩性低(工件分布不均勻)等,這些局限性阻礙了五金家私等小件機器人焊接自動化生產的推廣。
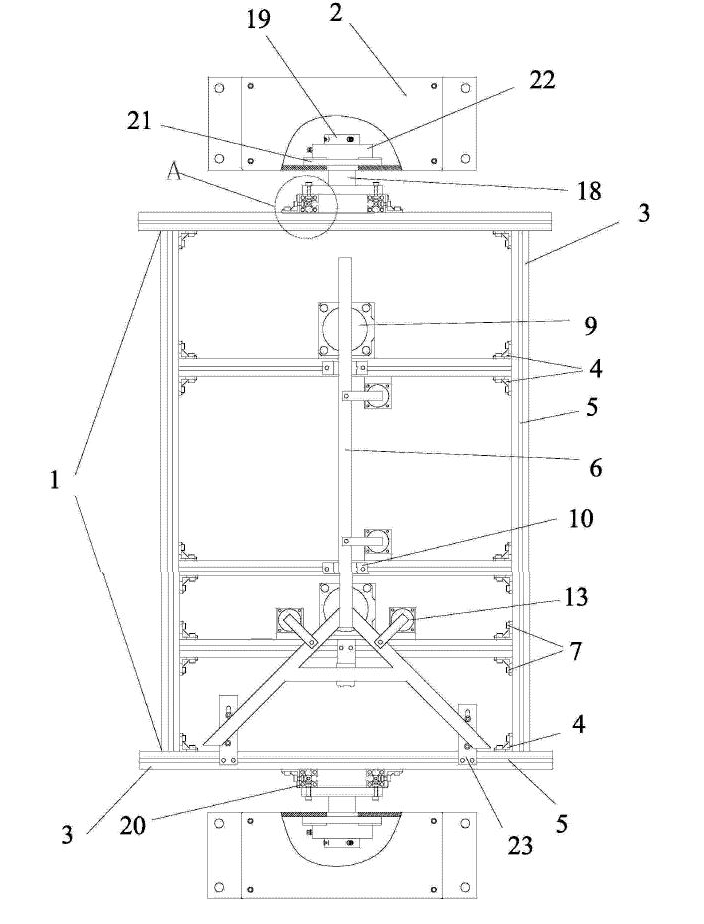
圖3 1.工作臺 2.支座 3.支架 4.連接塊 5.連接槽 6.工件7.螺絲 9.頂件裝置 10.定位裝置一 13.壓緊裝置18.主軸 19.外球面軸承 20.調節支架 21.法蘭22.軸承座 23.定位裝置二 技術方案: 設計如圖3新型的自動焊接翻轉夾具,包括用于工件的定位和提供焊接平臺的工作臺;設置在工作臺兩側的用于支撐工作臺的支座;設置在支座內的驅動機構,驅動機構間通過連接機構實現驅動工作臺翻轉。
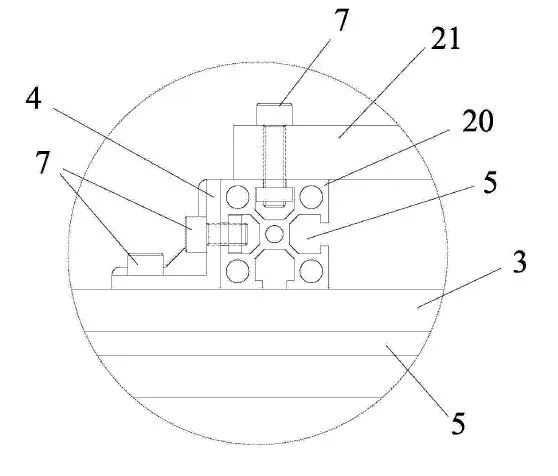
圖4 A面剖視圖 3.支架 4.連接塊 5.連接槽 7.螺絲 20.調節支架 21.法蘭 在圖3方案中,工作臺為組裝式結構,可根據工件的加工量或實際需求相應地改變工作臺的尺寸和規格,有利于按照不同規格工件的按需布設。兩個支座分開設置的,中間沒有固定連接,可按需移動,適應長短不同的工件。
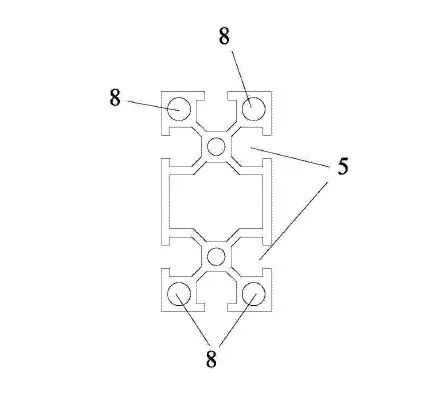
圖5 支架示意圖 5.連接槽 8.通孔 組裝式工作臺是指,工作臺包括由若千支架組裝構成的基架。支架為型材支架,可采用標準件型材,也可根據加工需求選擇不同的規格,進而相適應組裝成不同尺寸的基架。
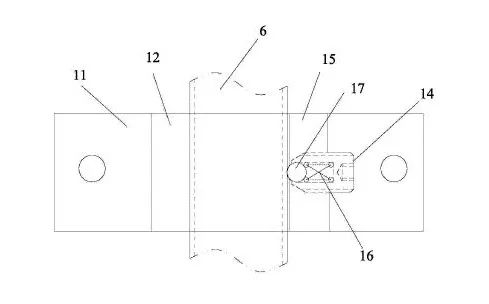
圖6 定位裝置一 6.工件 11.底座二 12.定位部 14.彈性件 15.固定件 16.彈簧 17.鋼珠
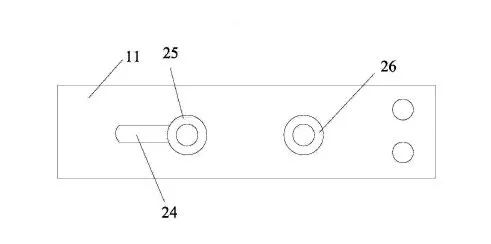
圖7 定位裝置2 11.底座二 24.長槽孔 25.彈性件 26.定位部 將工件定位在工作臺上的定位裝置如上所示,上面的底座通過緊固件和連接槽與支架連接實現定位裝置與工作臺連接。底座上的壓緊部與定位部相對,實現壓緊部對緊靠于所述定位部的工件彈性定位,有效并且快速。 結語感謝以上專利方案的來源方漳州聯合華鑫焊接自動化公司、佛山泰格威德機電設備有限公司
-
機器人
+關注
關注
211文章
28476瀏覽量
207414 -
焊接
+關注
關注
38文章
3153瀏覽量
59862
原文標題:機器人焊接工裝夾具設計方案,值得收藏!
文章出處:【微信號:indRobot,微信公眾號:工業機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
焊接機器人焊接工藝了解嗎?管道焊接機器人可視焊縫追蹤系統介紹
焊接機器人與傳統焊接的區別
焊接機器人安裝與調試指南

焊接機器人調試技巧有哪些

如何保證焊接機器人的重復操作精確度?
機器人激光焊接機--極端條件下的焊接挑戰表現

六軸焊接機器人的操作流程

焊接工藝對機器人的要求有哪些

視覺機器人焊接的研究現狀

焊接專機與焊接機器人哪個好

機器人自動化焊接工作站的優點,技術特點及應用
機器人焊接技術的應用與發展前景
焊接機器人的工作原理與優勢分析






 工商網監
工商網監
評論