 關于MEMS陀螺儀工作原理
關于MEMS陀螺儀工作原理
陀螺儀是用來測量角速率的器件,在加速度功能基礎上,可以進一步發展,構建陀螺儀。
陀螺儀的內部原理是這樣的:對固定指施加電壓,并交替改變電壓,讓一個質量塊做振蕩式來回運動,當旋轉時,會產生科里奧利加速度,此時就可以對其進行測量;這有點類似于加速度計,解碼方法大致相同,都會用到放大器。
角速率由科氏加速度測量結果決定- 科氏加速度 = 2 × (w × 質量塊速度) - w是施加的角速率(w = 2 πf) 通過14 kHz共振結構施加的速度(周期性運動)快速耦合到加速度計框架- 科氏加速度與諧振器具有相同的頻率和相位,因此可以抵消低速外部振動 該機械系統的結構與加速度計相似(微加工多晶硅)信號調理(電壓轉換偏移)采用與加速度計類似的技術 施加變化的電壓來回移動器件,此時器件只有水平運動沒有垂直運動。如果施加旋轉,可以看到器件會上下移動,外部指將感知該運動,從而就能拾取到與旋轉相關的信號。
上面的動畫,只是抽象展示了陀螺儀的工作原理,而真實的陀螺儀內部構造是下面這個樣子,別不小心誤會了哦~
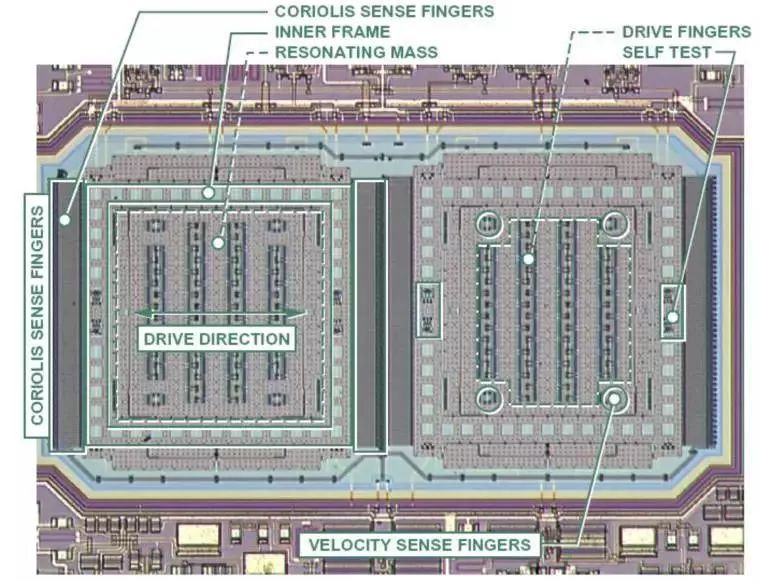
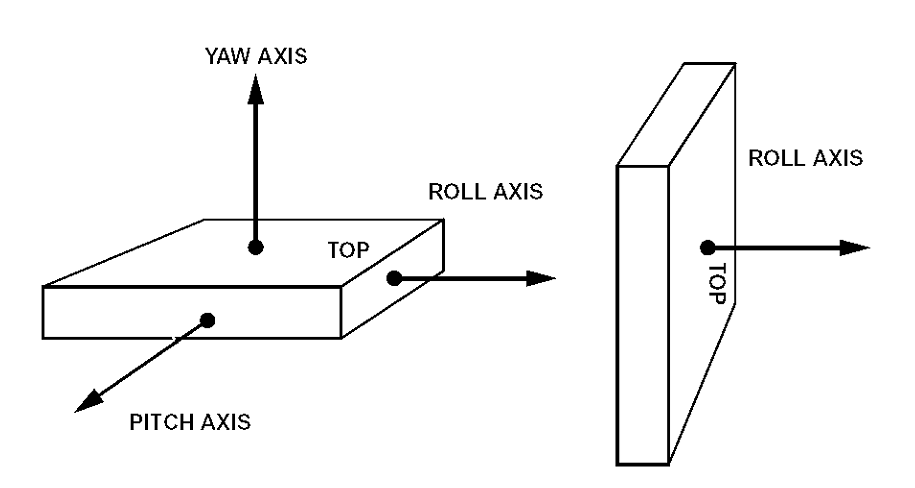
PS:陀螺儀可以三個一起設計,分別對應于所謂滾動、俯仰和偏航。任何了解航空器的人都知道,俯仰是指航空器的上下方向,偏航是指左右方向,滾動是指向左或向右翻滾。要正確控制任何類型的航空器或導彈,都需要知道這三個參數,這就會用到陀螺儀。它們還常常用于汽車導航,當汽車進入隧道而失去GPS信號時,這些器件會記錄您的行蹤。 無人機在飛行作業時,獲取的無人機影像通常會攜帶配套的POS數據。從而在處理中可以更加方便的處理影像。而POS數據主要包括GPS數據和IMU數據,即傾斜攝影測量中的外方位元素:(緯度、經度、高程、航向角(Phi)、俯仰角(Omega)及翻滾角(Kappa))。 GPS數據一般用X、Y、Z表示,代表了飛機在飛行中曝光點時刻的地理位置。 飛控是由主控MCU和慣性測量模塊(IMU,Inertial Measurement Unit)組成。IMU提供飛行器在空間姿態的傳感器原始數據,一般由陀螺儀傳感器/加速度傳感器/電子羅盤提供飛行器9DOF數據。 IMU中的傳感器用來感知飛行器在空中的姿態和運動狀態,這有個專有名詞叫做運動感測追蹤,英文Motion Tracking。運動感測技術主要有四種基礎運動傳感器,下面分別說明其進行運動感測追蹤的原理。 微機電系統(MEMS) IMU中使用的傳感器基本上都是微機電系統(MEMS),是半導體工業中非常重要的一個分支。 微機電系統(MEMS, Micro-Electro-Mechanical System)是一種先進的制造技術平臺。微機電系統是微米大小的機械系統,是以半導體制造技術為基礎發展起來的。 我們的四軸飛行器上用到的加速度陀螺儀MPU6050,電子羅盤HMC5883L都是微機電系統,屬于傳感MEMS分支。傳感MEMS技術是指用微電子微機械加工出來的、用敏感元件如電容、壓電、壓阻、熱電耦、諧振、隧道電流等來感受轉換電信號的器件和系統。 加速器(G-sensors) 加速器可用來感測線性加速度與傾斜角度,單一或多軸加速器可感應結合線性與重力加速度的幅度與方向。含加速器的產品,可提供有限的運動感測功能。 加速度計的低頻特性好,可以測量低速的靜態加速度。在我們的飛行器上,就是對重力加速度g(也就是前面說的靜態加速度)的測量和分析,其它瞬間加速度可以忽略。記住這一點對姿態解算融合理解非常重要。 當我們把加速度計拿在手上隨意轉動時,我們看的是重力加速度在三個軸上的分量值。加速度計在自由落體時,其輸出為0。為什么會這樣呢?這里涉及到加速度計的設計原理:加速度計測量加速度是通過比力來測量,而不是通過加速度。 陀螺儀(Gyros) 陀螺儀是利用高速回轉體的動量矩敏感殼體相對慣性空間繞正交于自轉軸的一個或二個軸的角運動檢測裝置。利用其他原理制成的角運動檢測裝置起同樣功能的也稱陀螺儀。 陀螺儀可感測一軸或多軸的旋轉角速度,可精準感測自由空間中的復雜移動動作,因此,陀螺儀成為追蹤物體移動方位與旋轉動作的必要運動傳感器。不像加速器與電子羅盤,陀螺儀不須借助任何如重力或磁場等的外在力量,能夠自主性的發揮其功能。所以,從理論上講只用陀螺儀是可以完成姿態導航的任務的。 陀螺儀的特性就是高頻特性好,可以測量高速的旋轉運動。缺點是存在零點漂移,容易受溫度/加速度等的影響。 電子羅盤(E-Compasses) 電子羅盤也叫數字指南針,磁力計,是利用地磁場來定北極的一種方法。現在一般有用磁阻傳感器和磁通門加工而成的電子羅盤。 電子羅盤可由地球的磁場來感測方向。運用電子羅盤的消費性電子產品應用,包含在手機的地圖應用程序顯示正確方向,或為導航應用程序提供前進方向數據。然而,電子設備或建筑材料的磁場干擾,比地球磁場來得強,導致電子羅盤傳感器的輸出值,較容易受到各種環境因素的影響,尤其在室內更是如此,因此,電子羅盤須要透過頻繁的校正,才能維持前進方向數據的準確度。 壓力傳感器(Barometers) 壓力傳感器又叫做氣壓計,會藉由氣壓的變化來感測物體的相對與絕對高度,常被運用于與運動、健身、方位推測等應用有關的消費性產品中,例如,可感測使用者的移動層樓,調整地圖信息。 IMU數據主要包含了:航向角(Phi)、俯仰角(Omega)及翻滾角(Kappa)三個數據。 1、航向角(Phi) 航向角英文縮寫是:Phi。定義為:飛機和航天飛機的縱軸與地球北極之間的夾角。 示意圖如下圖所示:
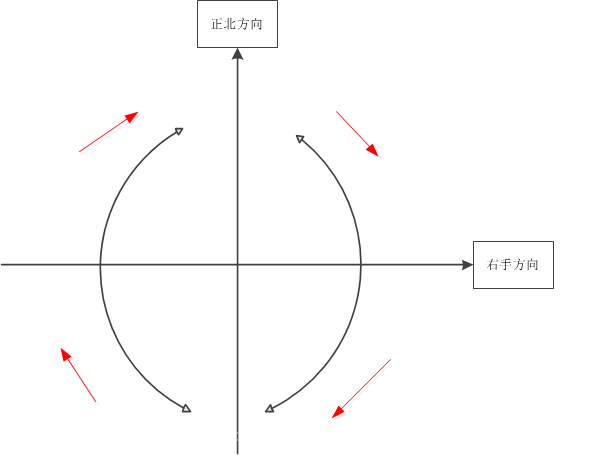
2、俯仰角(Omega) 俯仰角英文縮寫是:Omega。定義為:平行于機身軸線并指向飛行器前方的向量與地面的夾角。 示意圖如下:
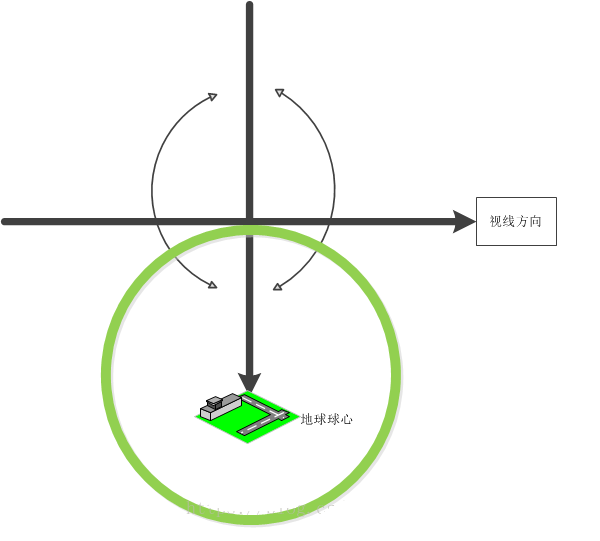
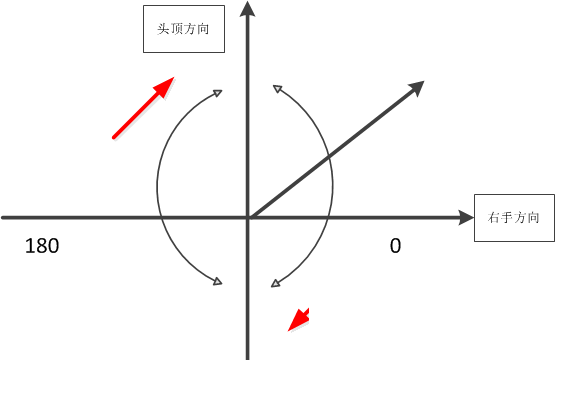
3、翻滾角(Kappa) 翻滾角又叫側滾角,英文縮寫是Kappa。定義為:光軸與十周之間的夾角。 示意圖如下圖所示:
-
mems
+關注
關注
129文章
3931瀏覽量
190628 -
陀螺儀
+關注
關注
44文章
784瀏覽量
98714 -
加速度計
+關注
關注
6文章
702瀏覽量
45897
原文標題:MEMS陀螺儀工作原理
文章出處:【微信號:wwzhifudianhua,微信公眾號:MEMS技術】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
MEMS陀螺儀工作原理及性能提升方法的綜述

陀螺儀x軸和y軸的應用
EPSON X2A0002710002 XV7011BB陀螺儀傳感器的特征和用途
一文探秘MEMS陀螺儀工作原理與特性







 工商網監
工商網監
評論