 快換頭抓手的”SMC模塊無電源斷網故障”處理分析
快換頭抓手的”SMC模塊無電源斷網故障”處理分析
1.快換頭機器人經常出現快換頭抓手的”SMC模塊無電源斷網故障”,有時史陶比爾快換模塊報電源故障.
下面介紹一下對此故障的處理分析經過.
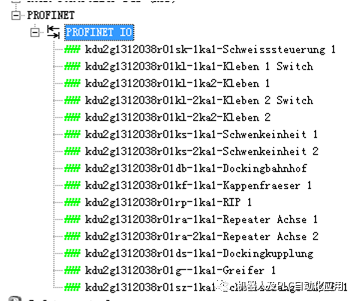
該KUKA機器人帶有多個PN設備組合-共15個分站.
機器人X3.3的輸出電壓值是27V
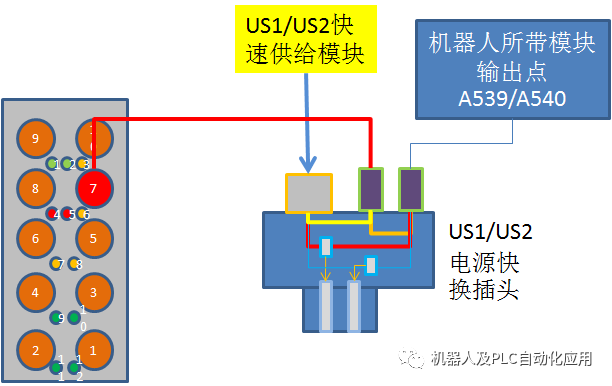
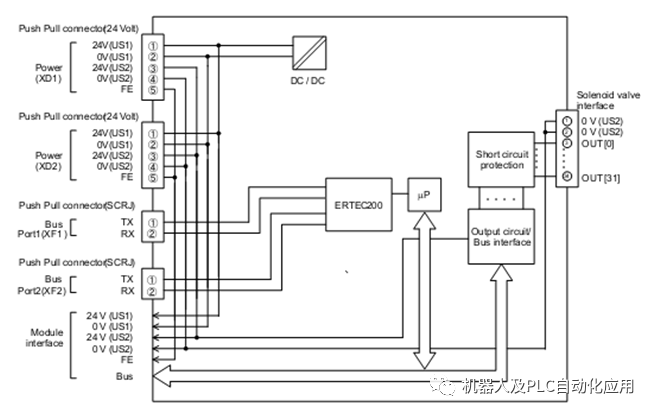
電源的連接圖:
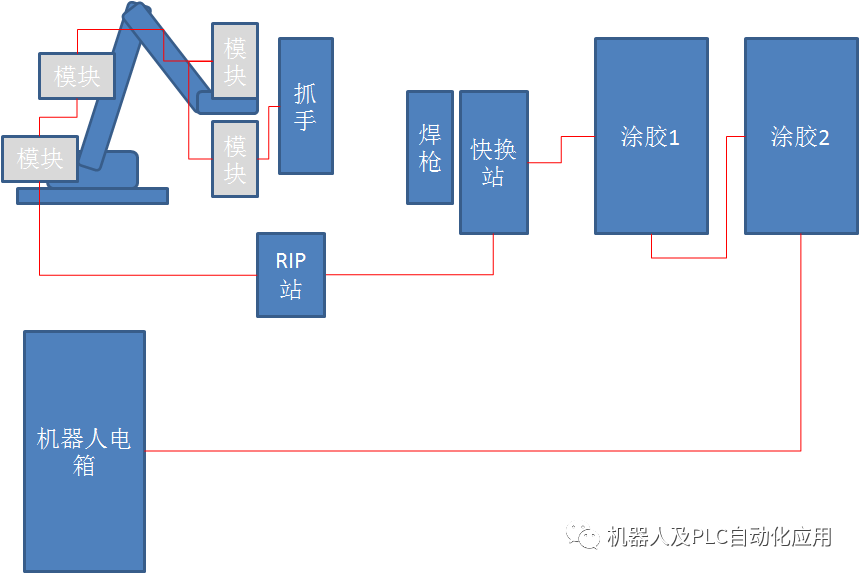
抓手電壓分析與測量.
SMC模塊的標準電壓是24V
分析SMC電源故障:無電源掉網,說明US1無電,或者欠電.測量抓手SMC入端的US1電壓,電壓值為23.8V,在電壓穩定時不出故障,當有設備工作不穩定時電壓會更低.
快換頭抓手分析與測量.
測量快換頭模塊的入端電壓是24.05V,出端給抓手的電壓是23.8V.產生電壓降.當出現欠電故障后,低于24V較多使得快換頭模塊報欠電壓故障。
對其機器人上個軸的模塊電壓進行測量,電壓降再0.3V左右.
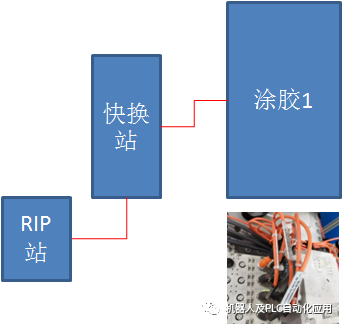
測量涂膠1的出口US1電壓是26.8V.
測量快換站上的SMC模塊電源出口電壓是25.8V,發現快換站的SMC模塊拉電太多達到1V左右,與相鄰工位進行比較發現其他的SMC模塊電壓降在0.3V左右,因此認定為故障點在快換站的SMC模塊存在拉電故障!
-------------
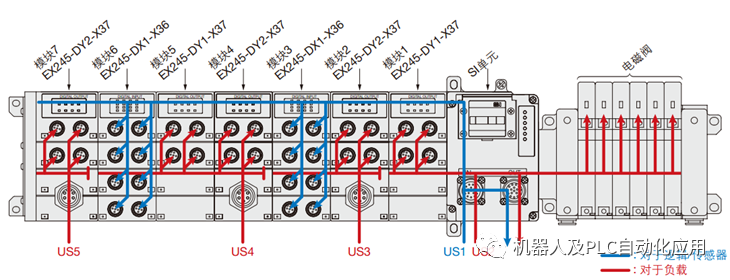
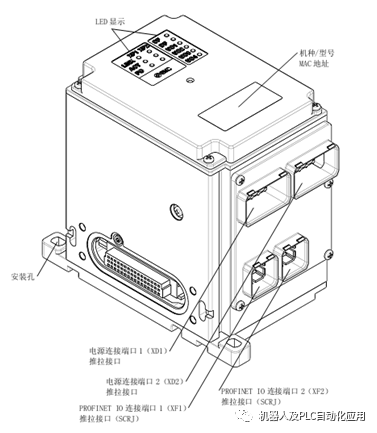
SMC模塊的基本信息:
SMC –EX 245-SPN 1模塊的基本數據
1 24V (US1)
2 0V (US1)
3 24V (US2)
4 0V (US2)
5 FE
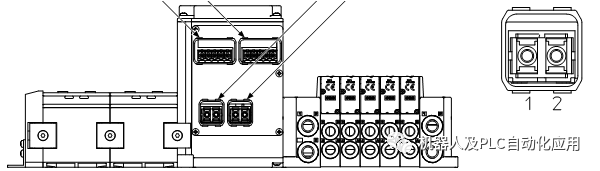
1 TX 發送數據
2 RX 接收數據
| No. | 產品 | 功能 |
| 1 | SI 單元 | 進行現場總線通信和集裝式電磁閥的 ON/OFF 輸出。給輸入輸出模 |
| 塊供給電源。 | ||
| 2 | 數字輸入模塊 | 導入輸入設備的傳感器、開關輸出。 |
| 3 | 數字輸出模塊 | 驅動電磁閥、指示燈、蜂鳴音等的輸出設備。 |
| 4 | 端板 | SI 單元、以及輸入輸出模塊用端板。 |
| 5 | 電磁閥 | 驅動空氣設備 |
| 項目 | 規格 |
| 額定電壓 | DC24 V |
| 允許瞬時停電 | 1 msec |
| 防護等級 | IP65 (連接集裝板時,通過適當的防水連接器連接時) |
| 規格 | CE 認證、RoHS |
| 耐電壓 | AC500 V、1 分鐘 外部端子整體與 FE 之間 |
| 絕緣電阻 | DC500 V、10 MΩ 以上 外部端子整體與 FE 之間 |
| 使用溫度范圍 | -10~50 ℃ |
| 保存溫度范圍 | -20~60 ℃ |
| 使用濕度范圍 | 35%~85%RH(無結露) |
| 10~57 Hz:定振幅 0.75 mm p-p | |
| 耐振動 | 57~150 Hz:49 m/s2 |
| XYZ 各方向 2 小時 | |
| 耐沖擊 | 147 m/s2 XYZ 各方向 3 次(不通電) |
| 使用環境 | 無腐蝕氣體,無灰塵 |

| 顯示 | 內容 | 顏色 |
| LINK (X1) | Port1(X1)的通信連接 | 綠 |
| ACT (X1) | Port1(X1)的數據發送接收 | 黃 |
| LINK (X2) | Port2(X2)的通信連接 | 綠 |
| ACT (X2) | Port2(X2)的數據發送接收 | 黃 |
| FO1(X1) | Port1(X1)的通信狀態顯示 | 橙 |
| FO2(X2) | Port2(X2)的通信狀態顯示 | 橙 |
| SF | 系統故障 | 紅 |
| BF | 總線故障 | 紅 |
| US1 | 控制/輸入用電源 | 綠 |
| US2 | 輸出/電磁閥用電源 | 綠 |
| US3 | 可選項 | - |
| US4 | 可選項 | - |
| 電源電壓范圍 | DC24 V ±10% | ||
| 電壓降低檢出 | 檢出 : 約 DC 20.4 | V 以下 | |
| 復位 : 約 DC 21.6 | V 以上 | ||
| US1 | |||
| 最大供給電流 | 6 A | ||
| 傳感器用輸入電源供給 | 約 DC 17 V 以下 | ||
| 阻斷電壓 | |||
| 電源電壓范圍 | DC24 V +10%/-5% | ||
| 電壓降低檢出 | 檢出: 約 DC 21.6 | V 以下 | |
| 復位 : 約 DC 22.8V 以上 | |||
| 最大供給電流 | 4 A | ||
| 輸出/電磁閥用電源供給 | 約 DC17 V 以下 | ||
| 阻斷電壓 |
-
電源
+關注
關注
184文章
17774瀏覽量
250777 -
模塊
+關注
關注
7文章
2721瀏覽量
47567 -
機器人
+關注
關注
211文章
28512瀏覽量
207509
原文標題:快換頭抓手的”SMC模塊無電源斷網故障”處理分析
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
自動快換助力協作機器人實現“彎道超車”

電流速斷保護是防止什么故障的保護
換電要被超快充淘汰了?
DCDC電源模塊故障排除方法
無擾動快切裝置是什么?無擾動快切裝置原理是什么?無擾動快切裝置有哪些功能?
安捷倫N5230A網絡分析儀出現故障了如何解決

AC/DC電源模塊的故障診斷與維修技巧

DC電源模塊的調試和故障排除技巧
常見的DC電源模塊故障及解決方法

DC電源模塊的故障排除與維修方法
DC電源模塊如何故障排除與維修






 工商網監
工商網監
評論