 可見光智能家居系統的信道模型分析
可見光智能家居系統的信道模型分析
物聯網(The Internet of Things) 通過組建“物-物”網絡,實現萬物高效、安全、便捷的連接,能達到實時監控、管理各種設備的目的。“物-物”網絡的組建需要借助有線或者無線通信技術。有線通信技術雖然安全可靠,但是布線成本很高且不便于移動,所以無線通信在物聯網中逐步占據了主導地位。隨著各種無線通信業務需求的增加,無線電頻譜資源變得越來越擁擠,鄰頻干擾問題也越來越嚴重,因此必須拓展新的無線頻譜資源。太赫茲、可見光已經成為 6G 通信的備選頻段。
可見光通信(Visible Light Communication)利用發光二極管發出明暗變化的信號來傳輸信息,它是一種新的無線光通信手段,具有速率高,安全性好,可以在電磁敏感區使用等優點。2000 年,日本 KEIO 大學的 Tanaka、Komine、Sugiyama 等人提出基于室內照明 LED 燈的可見光構建無線家庭鏈路的概念。2008 年,歐盟啟動了包含可見光通信的歐米伽計劃,美國成立了從事可見光通信技術研究的智能照明中心。 同年,中國科學院安排半導體
研究所基于可見光通信技術開展半導體照明信息網研發。2013 年,國家 863 計劃和 973 計劃資助國內的科研團隊開始從事可見光通信技術研究,后來取得了一系列研究成果。2019 年,歐洲地平線計劃 H2020 資助了可見光通信的物聯網研究。預計,可見光通信技術的商用化將進一步加快。
現在商用的智能家居系統源于 WHL(Wireless Home Link)的概念,多使用紅外(IR) 或射頻(RF)通信技術。隨著半導體照明技術的發展,被譽為“綠色照明”的白光 LED 已經占據了主要市場,由于燈光信號具備室內全覆蓋的特點,其控制范圍遠大于手持紅外遙控器。本文作者所在研究團隊從 2008 年開始從事可見光智能家居系統的研究,希望將 LED 照明燈具的價值最大化。現有可見光智能家居系統的研究多使用強度調制和直接檢測技術,接收終端抗低頻噪聲干擾能力差,本文提出將紅外協議應用于可見光智能家居領域,能使帶有紅外遙控接收功能的家用電器和物聯網執行終端在保留原有紅外遙控功能的基礎上,實現紅外和可見光的雙模控制。根據國家照明標準,建筑物內照度要求最低的環境是車庫,為30Lux,加上燈光閃爍條件的限制,LED 燈具發送低頻信號時的照度變化將極小。可見光智能家居系統能夠檢測微弱光信號的變化,意味著它支持受控終端大范圍的移動,能真正實現安全、經濟、環保、高效的萬物光互連,有望解決工業電磁環境下工業機器人無線操控的技術難題。
本文針對物聯網的應用需求,建立了可見光智能家居系統的信道模型,并進行理論分析及數據仿真,得到了該可見光智能家居系統在防閃爍前提下正確操控的最大通信范圍;使用研制的可見光、紅外雙模光接收器搭建了兼容紅外的可見光智能家居控制系統;測試了家用LED 燈具對可見光智能家居系統控制的范圍與正確率,驗證了新技術方案的可行性和理論計算的準確性。
1.理論推導
紅外通信和可見光通信系統都包括光的調制、光電的轉換和電信號的解調這三個主要部分。常用紅外遙控器是“亮-滅”調制,雖然常用載波頻率是 38KHz,但紅外協議中信號頻率最低為 25Hz 左右,為了不影響可見光 LED 的照明效果,在 LED 發送紅外協議格式的信號時, 需要使用“明-暗”的調制方式,即限制其調制深度。調制深度的定義為:光信號最大值與最小值的差除以光信號最大值與最小值的和。因此調制深度越小,LED 燈發送信號時造成的“閃爍”現象就越不明顯,但是其通信范圍也越小。因此本文將通過公式推導和軟件仿真去計算在調制深度為閃爍臨界值的時候,可見光智能家居系統的信號有效覆蓋范圍,以驗證其實用性。
1.1 光功率模型
圖 1 是朗伯光源的信道模型示意圖,其中 d 為光源與接收器的直線距離;? 為 LED 和接收器連線與 LED 光軸的夾角;?1 2 為 LED 輻射強度半角; ? 為接收器表面法線與入射光線的夾角。可見光智能家居系統傳輸的是低速信號(載波頻率為 38KHz),因此可見光多徑效應引起的碼間干擾可以忽略。假設墻壁反射系數為 0.81,則平均接收光功率中四側墻反射光貢獻率為 27.58%。因為反射光功率與墻壁的反射系數成正比,本文實驗環境為長過道,只需考慮兩側墻壁的發射,該墻壁反射系數為 0.5,所以反射光功率的貢獻遠小于 27.58%。為了充分證明可見光智能家居系統信號大范圍覆蓋的能力,將在不考慮反射光對光信號的增益的前提下來計算信號有效覆蓋范圍。
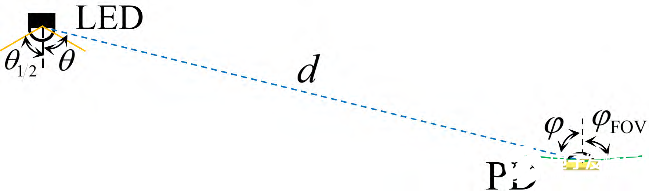
圖1 朗伯光源的信道模型示意圖
已知朗伯光源模型的輻射公式為:

式中: R(θ)為輻射強度; Ps 為發射光功率; m 為 LED 的輻射方向性指數:

由表 1 可知LED 的半功率角為 60°,因此 m=1。
表 1 仿真參數
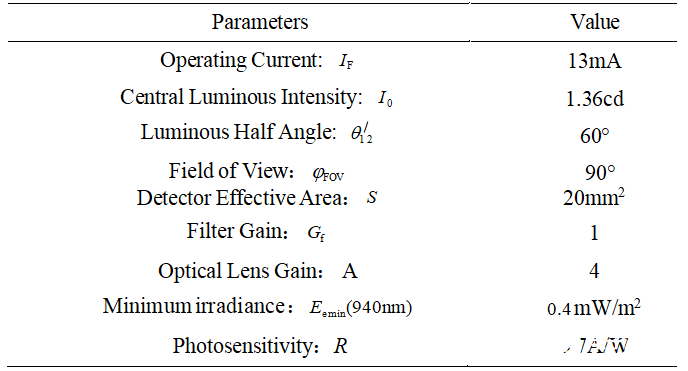
圖2 LED燈板
由于 LED 是非相干光源,所以 LED 陣列光源可以采用朗伯模型。建立一個長、寬、高為30m×2.1m×2.6m 的室內走廊空間模型(由于普通房間無法進行遠距離測試,所以選用走廊進行實驗),將 LED 燈板的位置設為(5,1.05,2.5),接收器水平放置在距離地面 0.25m 的高度。光源如圖 2 所示,為一個 20×12 陣列的 LED 燈板,LED 的間距為 20mm,燈具的工作電流為260mA,工作電壓為37.2V,故LED 燈的電功率約為9.7W。每顆LED 的位置為(xn ,yn ,2.5),接收器的中心位置為(x ,y ,zh), zh 表示接收器到地面的距離,則 LED 到接收器中心的距離可表示為:

接收器接收到單顆 LED 發射的光功率可表示為:

式中: PT 為發射光功率; S 為接收器的面積; Gf (φ) 為光學濾波器的增益; G(φ) 為光學集中器的增益;φFOV 為接收器視場角。圖 3 為接收器的相對輻射特性曲線,可以看出其接近于余弦的二分之三次方,因此光學集中器的增益G(φ) 可以表示為:

式中: A 為光學集中器 0°所對應的增益。
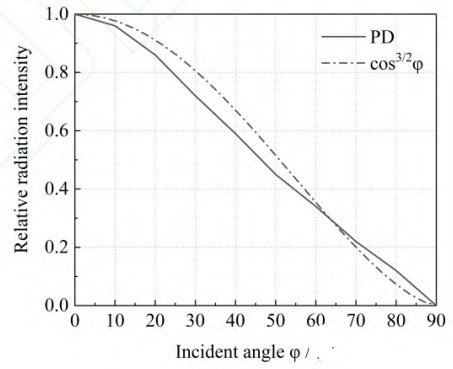
圖 3 接收器相對輻射特性曲線
由于 LED 光源為非相干光源,且Cosθ=cosφ (2.5 - zh )/dn,所以接收器接收 LED 燈具發射的光功率可以表示為:

1.2最小接收光功率
照明最常用熒光型 LED 的光譜主要覆蓋藍光和黃光兩個波段。圖 2 所示 LED 陣列使用的 LED 是 GT3528,圖 4(a)是其光譜分布曲線,其光譜分布覆蓋 380-780nm。本文設計的一體化光接收器 GT59438R 光譜響應特性曲線如圖 4(b)所示,其光譜響應范圍在 350nm 到1100nm,不僅可以響應可見光波段的光信號,還可以響應紅外波段的光信號。
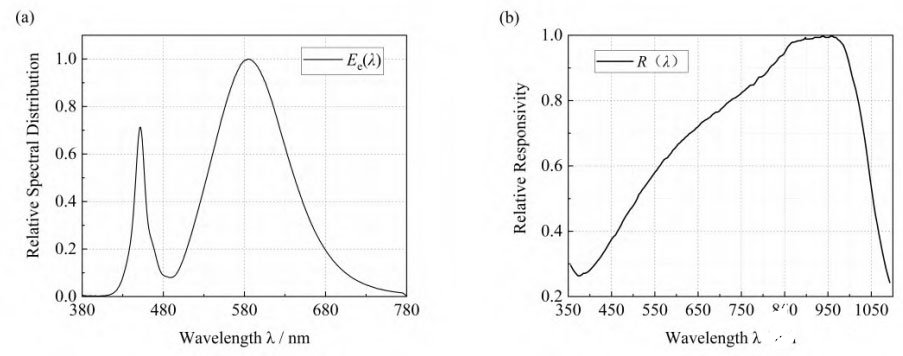
圖4 LED光譜分布曲線與接收器光譜響應曲線。(a)LED;(b)光接收器
由公式7:

式中:Ee min (λ) 為使接收器正常工作的最小輻射照度; Pth (λ) 為通量閾;imin 為使接收器正常工作的最小光生電流; S 為接收器的有效面積; R(λ) 為接收器的光譜響應曲線。設:
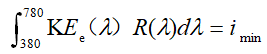
其中K 為接收器接收到的 LED 光束峰值波長對應的光功率。因此對于 LED-GT3528 光源,該接收器至少需要接收到的光功率為:

1.3閃爍融合條件
設計閃爍感知實驗:邀請 10 位被試人員(5 男 5 女),在不同環境亮度條件下分別測試被試人員非直視和直視時對閃爍的感知情況,每種條件下發送 10 次遙控信號。其中環境亮度條件 1:晴天開燈,室內測試燈具下 1m 處的照度為 300Lux-400Lux;環境亮度條件 2:晴朗白天,室內測試燈具下 1m 處的照度為 160Lux-200Lux;環境亮度條件 3:白天拉上窗簾,室內測試燈具下 1m 處的照度為 0Lux-1Lux。被試人員認為感覺不到閃爍的統計結果如表 2 和表 3 所示,其中調制深度的計算:取 LED 燈具不發送信號時的照度作為光信號最大值;取發送 38KHz 方波時的照度作為光信號最小值。測量位置位于 LED 燈具下 1m,不發送信號時照度固定為 364.3Lux。
表 2 非直視條件下被試人員對閃爍的感知
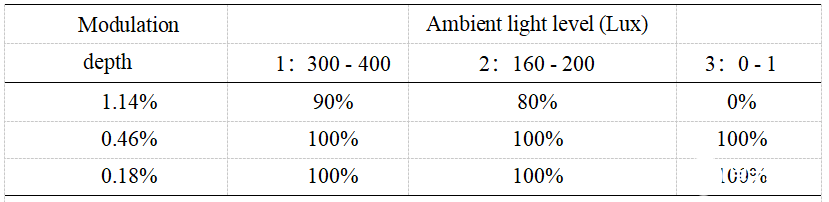
表 3 直視條件下被試人員對閃爍的感知
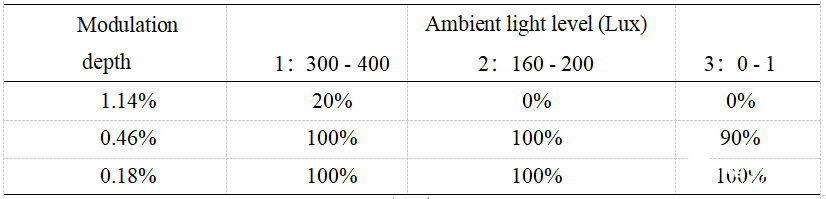
根據 IEEE 2015 年發布的 LED 調制相關標準,當 LED 的閃爍頻率 f ? 90Hz 時,調制深度應小于 f ? 0.025% 。已知紅外協議 NEC 格式的信號最低頻率為 25Hz,則調制深度應小于25Hz? 0.025=0.625% ,符合閃爍感知實驗的結果,因此可將LED 燈具的調制深度設為0.46% 。
1.4控制范圍分析
經測試計算,實驗用 LED 燈具調制深度為0.46% 時,單顆LED 光功率變化約為 9mW。圖 5 是發射光功率為 9mW、 zh 為 0.25m 條件下室內模型的光功率分布圖,可以看出光功率等于13nW 的點與燈具的水平距離為 14m,即該套可見光智能家居系統的有效控制范圍是一個半徑為 14m 的圓,面積約為 616m2。
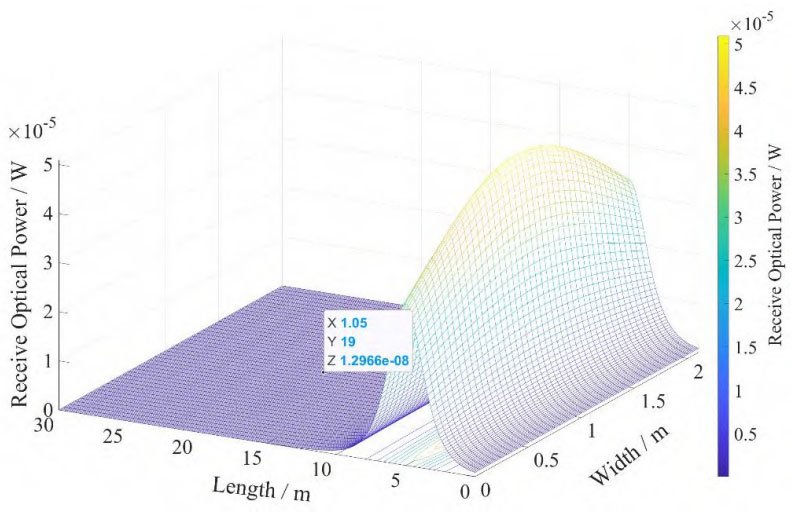
圖5 zh =0.25m 時接收功率分布圖
2.系統設計
2.1調制電路與接收器設計
調制模塊的原理框圖如圖 6(a)所示,聯網的手機將控制指令發送給 Wi-Fi 模塊,然后傳遞給 STM32 單片機,STM32 單片機將接收到的控制指令進行編碼,最后經過調制電路加載到 LED 燈具上轉換為可見光信號。
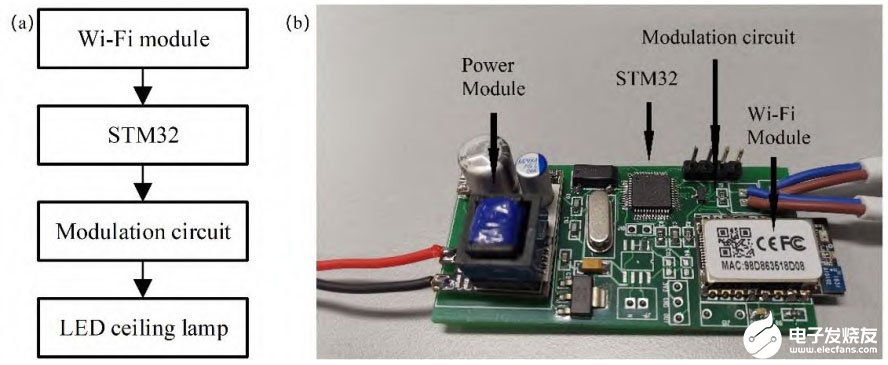
圖 6 調制模塊。(a)原理框圖(b)實物圖
一體化光接收器 GT59438R 實物圖見圖 7(b),主要使用金絲球焊技術將光電探測器和電路芯片連接在一起,然后采用雙酚 A 型透明環氧樹脂材料進行封裝。原理框圖如圖 7(a) 所示,電路芯片中的放大電路將電流信號轉換為較大的電壓信號,經過帶通濾波器濾除噪聲后傳給解調電路恢復出控制指令。
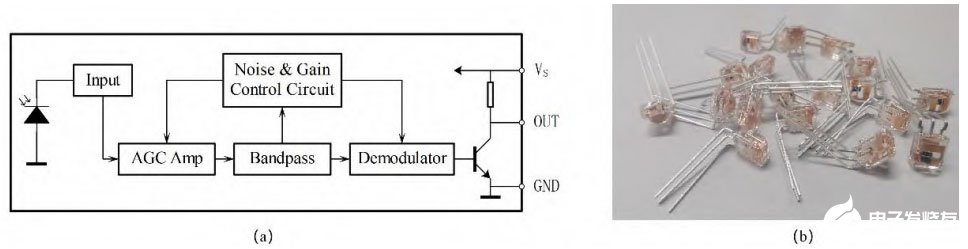
圖 7 一體化光接收器。(a)原理框圖(b)實物圖
2.2系統搭建
為了測試該智能家居系統對可見光及紅外控制指令的響應情況和上述計算仿真的準確性,在實驗室搭建了如圖 8 所示的實驗驗證系統,其中實驗選用的遙控機器人型號為雄勝星寶戰士 3。
圖8 系統測試圖。(a)基于大功率LED照明燈的可見光智能家居系統;(b)遙控機器人
3.系統測試與分析
利用上述實驗系統,令 LED 燈具發送紅外協議格式的遙控指令,通過測試接收終端對控制指令的正確響應率,表征基于可見光通信的物聯網系統的誤碼率。
對于如圖 8 所示基于 LED 燈具的智能家居系統,點擊手機遙控器面板——機器人的“前進”和“后退”按鈕各 10 次,重復 10 次并記錄測試結果。然后,使用機器人原裝的紅外遙控器進行相同的測試步驟,并記錄測試結果。如表 4 所示,兩個機器人均能響應 LED 照明燈的遙控信號,正確率為 100%;同時,對紅外遙控器的響應正確率也為 100%。
表 4 系統測試結果
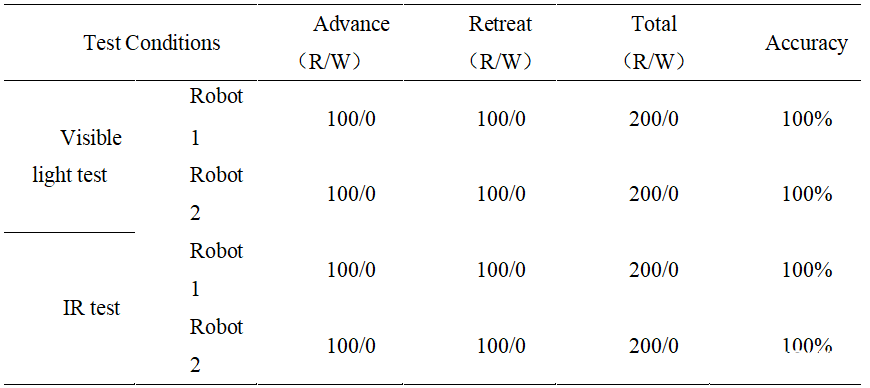
測試中,可見光控制系統的直線控制距離比紅外遙控器的略大,并且由于紅外遙控器的控制角度比較小,所以可見光智能家居系統的控制范圍比紅外遙控器大很多。該可見光智能家居系統 9.7W 燈具的最大有效控制距離的測試結果是 14.3m(對應圓形有效控制范圍 642m2),與仿真結果 14m 間的相對誤差為 2%。分析原因,2%的相對誤差是忽略反射光的信號增益等因素造成的。
由于實際生活中電器一般放置于房間的邊角處,此時墻壁的反射光會使得實際控制距離比仿真結果更大,因此實際使用時該可見光智能家居系統 9.7W 燈具的的控制范圍會大于616m2。
4.結 論
通過計算與仿真,獲得了 20×12 陣列、功率為 9.7W 的 LED 燈具發送低速紅外協議格式信號時,物聯網控制終端的最大控制距離和范圍分別為 14m 和 616m2。在實驗室搭建了可見光智能家居系統的實物平臺,測試結果表明系統實際最大控制距離為 14.3m,與理論計算的結果 14m 間相對誤差為 2%,驗證了模型的準確性。該系統的調制深度限制在 0.46%,滿足IEEE 的相關標準,證明了在不影響照明功能的前提下,用功率為 9.7W 的 LED 燈具搭建物聯網通信網絡,在 642m2 范圍內可以實現兼容紅外的可見光有效控制。
-
智能家居
+關注
關注
1928文章
9562瀏覽量
185127 -
智能家居系統
+關注
關注
1文章
101瀏覽量
14300
發布評論請先 登錄
相關推薦
創新技術驅動:車載可見光相機在智能交通中的新應用

PHOTONIS可見光 - 近紅外相機介紹
科學家開發出首臺可見光飛秒光纖激光器
智能家居系統設計方案
智能家居控制系統如何設計
慧視VIZ-GT05V三軸雙可見光吊艙:工業級無人機吊艙新選擇

紅外光轉可見光,革新可見光通信未來
繼電器在智能家居中的應用
新型量子傳感技術可見光測量紅外區域的擾動
可見光通信技術三大特性
Li-Fi可見光通信系統組成工作原理

紅外與可見光圖像融合方法綜述

紫外可見光光度計使用步驟 紫外可見光光度計怎么用
Python智能家居系統代碼介紹
基于3D打印和多孔硅的緊湊型可見光波長消色差透鏡開發






 工商網監
工商網監
評論