 光學系統設計的要求
光學系統設計的要求
任何一種光學儀器的用途和使用條件必然會對它的光學系統提出一定的要求,因此,在我們進行光學設計之前一定要了解對光學系統的要求。這些要求概括起來有以下幾個方面。

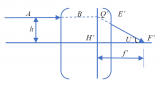
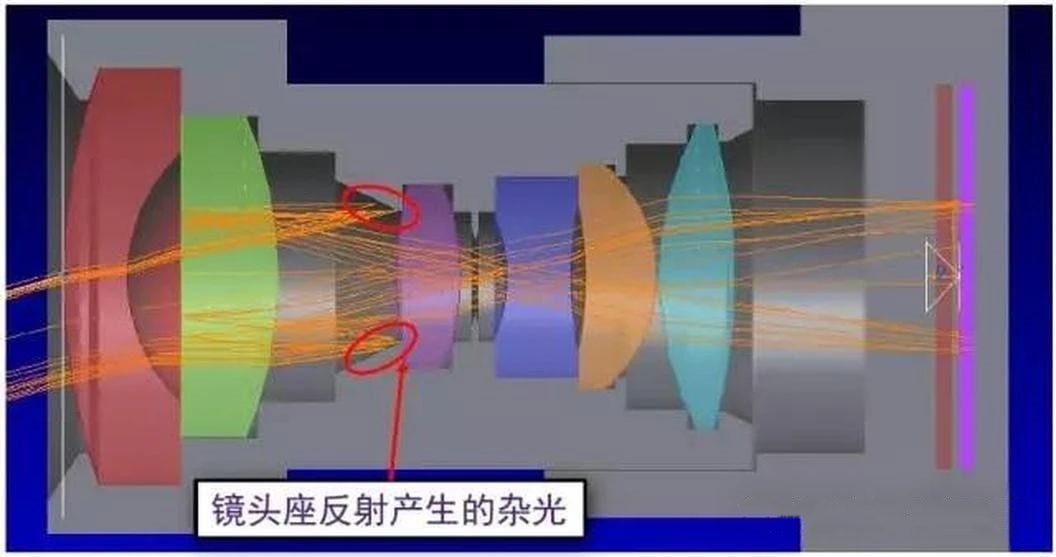
光學系統示意圖(光行天下配圖,來自網絡)
一、 光學系統的基本特性
光學系統的基本特性有:數值孔徑或相對孔徑;線視場或視場角;系統的放大率或焦距。此外還有與這些基本特性有關的一些特性參數,如光瞳的大小和位置、后工作距離、共軛距等。
二、 系統的外形尺寸
系統的外形尺寸,即系統的橫向尺寸和縱向尺寸。在設計多光組的復雜光學系統時,外形尺寸計算以及各光組之間光瞳的銜接都是很重要的。
三、 成像質量
成像質量的要求和光學系統的用途有關。不同的光學系統按其用途可提出不同的成像質量要求。對于望遠系統和一般的顯微鏡只要求中心視場有較好的成像質量;對于照相物鏡要求整個視場都要有較好的成像質量。
四、 儀器的使用條件
在對光學系統提出使用要求時,一定要考慮在技術上和物理上實現的可能性。如生物顯微鏡的放大率Г要滿足500NA≤Г≤1000NA 條件,望遠鏡的視覺放大率一定要把望遠系統的極限分辨率和眼睛的極限分辨率一起來考慮。
光學系統設計過程
所謂光學系統設計就是根據使用條件,來決定滿足使用要求的各種數據,即決定光學系統的性能參數、外形尺寸和各光組的結構等。因此我們可以把光學設計過程分為4 個階段:外形尺寸計算、初始結構計算、像差校正和平衡以及像質評價。
一、外形尺寸計算
在這個階段里要設計擬定出光學系統原理圖,確定基本光學特性,使滿足給定的技術要求,即確定放大倍率或焦距、線視場或角視視場、數值孔徑或相對孔徑、共軛距、后工作距離光闌位置和外形尺寸等。因此,常把這個階段稱為外形尺寸計算。一般都按理想光學系統的理論和計算公式進行外形尺寸計算。在計算時一定要考慮機械結構和電氣系統,以防止在機構結構上無法實現。每項性能的確定一定要合理,過高要求會使設計結果復雜造成浪費,過低要求會使設計不符合要求,因此這一步驟慎重行事。
二、初始結構的計算和選擇
初始結構的確定常用以下兩種方法:
1.根據初級像差理論求解初始結構這種求解初始結構的方法就是根據外形尺寸計算得到的基本特性,利用初級像差理論來求解滿足成像質量要求的初始結構。
2.從已有的資料中選擇初始結構
這是一種比較實用又容易獲得成功的方法。因此它被很多光學設計者廣泛采用。但其要求設計者對光學理論有深刻了解,并有豐富的設計經驗,只有這樣才能從類型繁多的結構中挑選出簡單而又合乎要求的初始結構。
初始結構的選擇是透鏡設計的基礎,選型是否合適關系到以后的設計是否成功。一個不好的初始結構,再好的自動設計程序和有經驗的設計者也無法使設計獲得成功。
三、像差校正和平衡
初始結構選好后,要在計算機上用光學計算程序進行光路計算,算出全部像差及各種像差曲線。從像差數據分析就可以找出主要是哪些像差影響光學系統的成像質量,從而找出改進的辦法,開始進行像差校正。像差分析及平衡是一個反復進行的過程,直到滿足成像質量要求為止。
四、像質評價
光學系統的成像質量與像差的大小有關,光學設計的目的就是要對光學系統的像差給予校正。但是任何光學系統都不可能也沒有必要把所有像差都校正到零,必然有剩余像差的存在,剩余像差大小不同,成像質量也就不同。因此光學設計者必須對各種光學系統的剩余像差的允許值和像差公差有所了解,以便根據剩余像差的大小判斷光學系統的成像質量。評價光學系統的成像質量的方法很多,下面簡單介紹一下像質評價的方法。
1.瑞利判斷
實際波面與理想波面之間的最大波像差不超過1/4 波長。其是一種較為嚴格的像質評價方法,適用于小像差系統如:望遠鏡、顯微物鏡等。
2.分辨率
分辨率是反映光學系統分辨物體細節的能力。當一個點的衍射圖中心與另一個點的衍射圖的第一暗環重合時,正好是這兩個點剛能分開的界限。
3.點列圖
由一點發出的許多光線經光學系統以后,由于像差,使其與像面的交點不現集中于同一點,而形成一個分布在一定范圍內的彌散圖形,稱之為點列圖。通常用集中30%以上的點或光線的圓形區域為其實際有效的彌散斑,它的直徑的倒數,為系統能分辨的條數。其一般用于評價大像差系統。
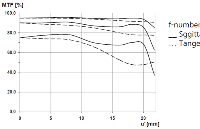
4.光學傳遞函數
此方法是基于把物體看作是由各種頻率的譜組成的,也就是將物的亮度分布函數展開為傅里葉級數或傅里葉積分。把光學系統看作是線性不變系統,這樣,物體經光學系統成像,可視為不同頻率的一系列正弦分布線性系統的傳遞。傳遞的特點是頻率不變,但對比度下有所下降,相位發生推移,并截止于某一頻率。對比度的降低和位相的推移隨頻率而異,它們之間的函數關系稱為光學傳遞函數。由于光學傳遞函數與像差有關,故可用來評價光學系統成像質量。它具有客觀、可靠的優點,并且便于計算和測量,它不僅能用于光學設計結果的評價,還能控制光學系統設計的過程、鏡頭檢驗、光學總體設計等各方面。
各類鏡頭的設計差別
一、照相鏡頭
照相鏡頭的光學特性可由三個參數來表示,即照相鏡頭的焦距f'、相對孔徑D/f'和視場角2ω'。其實就135 照相機而言,其標準畫幅已確定為24mm X 36mm,則其對角線長度為2D=43.266。從下表我們可以得出照相機鏡頭的焦距f'和視場角ω'之間存在著以下關系:tgω'=D/f'
式中:2D——畫幅的對角線長度;
f'——鏡頭的焦距。
照相機鏡頭的另一個最重要的光學特征指標是相對孔徑。它表示鏡頭通過光線的能力,用D/f'表示。它定義為鏡頭的光孔直徑(也稱入瞳直徑)D 與鏡頭焦距f'之比相對孔徑的倒數稱為鏡頭的光圈系數或光圈數,又稱F 數,即F=f'/D。當焦距f'固定時,F 數與入瞳直徑D 成反比。由于通光面積與D 的平方成正比,通光面積越大則鏡頭所能通過的光通量越大。因此當光圈數在最小數時,光孔最大,光通量也最大。隨著光圈數的加大,光孔變小,光通量也隨之減少。如果不考慮各種鏡頭透過率差異的影響,不管是多長焦距的鏡頭,也不管鏡頭的光孔直徑有多大,只要光圈數值相同,它們的光通量都是一樣的。對照相機鏡頭而言,F 數是個特別重要的參數,F 數越小,鏡頭的適用范圍越廣。與目視光學系統相比,照相物鏡同時具有大相對孔徑和大視場,因此,為了使整個像面都能看到清晰的并與物平面相似的像,差不多要校正所有七種像差。照相物鏡的分辨率是相對孔徑和像差殘余量的綜合反映。在相對孔徑確定后,制定一個既滿足使用要求,又易于實現的像差最佳校正方案。為方便起見,往往采用“彌散圓半徑”來衡量像差的大小,最終則以光學傳遞函數對成像質量作出評價。
近年來興起的數位相機鏡頭同上述的傳統相機鏡頭的特性和設計評價上大同不異,其主要差別有:
1.相對孔徑較傳統相機大。
2.較短的焦距,使得景深范圍增大。可根據視場角的大小算出相當傳統相機鏡頭的焦距值F’=43.266/(2*tgω)。
3.較高的分辨率,根據光電器件的PIXEL 的大小,一般數位鏡頭光學設計要達到1/(2*PIXEL)線對。
二、投影鏡頭
投影物鏡是將被照明的物成一明亮清晰的實像在屏幕上,一般講,像距比焦距大的多,所以物平面在投影物鏡物方焦平面外側附近。
投影物鏡的放大率是測量精度、孔徑大小、觀測范圍和結構尺寸的的重要參數。
放大率愈大,測量精度愈高,物鏡孔徑愈大。當工作距離一定時,放大率愈大,共軛距愈大,投影系統結構尺寸越大。由于其是起放大作用,自光學知識可知,像面中心照度與相對孔徑平方成正比,可用增大相對孔徑的方法來增加像面照度。
液晶式投影機上所用的投影鏡頭同傳統的投影物鏡的區別:
1.相對孔徑較大。
2.出瞳距長,即需要設計成近遠心光路。
3.工作距離長。
4.解像力高.
5.畸變要求高.
以上幾點,皆使得用于LCD 投影機上的投影物鏡較傳統的要復雜的多,一般要10 個鏡片左右,而傳統的一般只要3 個鏡片就能達到。
三、掃描鏡頭
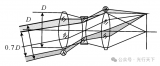
掃描物鏡可用三個光學特性來表示,即相對孔徑、放大率和共軛距。放大率是掃描物鏡的一個重要指標,由于一般物體大小是固定的,故放大率愈小,意味著鏡頭的像面愈小,焦距也就愈短,相對來講掃描系統結構可以做的更小,但同時要求鏡頭的解像力也愈高。共軛距是指物像之間的長度,對鏡頭來講,一般希望其愈長愈好,共軛距愈短,意味著鏡頭愈難設計(視場角增大)。其原理圖同照相物鏡一樣,是一個縮小的過程。
掃描物鏡的設計特點:
1.掃描物鏡屬于小孔徑小像差系統,要求的光學解像力較高。
2.由于光電器件的原因,不僅要校正白光(混合光)的像差,同時需要考慮R、G、B 三種獨立波長的像差。
3.嚴格校正畸變像差。
-
成像
+關注
關注
2文章
240瀏覽量
30483 -
光學儀器
+關注
關注
0文章
103瀏覽量
11565 -
光學系統
+關注
關注
4文章
243瀏覽量
18311
原文標題:光學系統設計的要求
文章出處:【微信號:cas-ciomp,微信公眾號:中科院長春光機所】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
高倍金相自動測量顯微鏡無限遠光學系統

高質量激光光束光學系統中的空間濾波
YXC可編程差分振蕩器,頻點50MHz,7050封裝,LVDS輸出,應用于激光測距儀
光學系統的像方基本參數結構示意圖
工業鏡頭光學系統的成像質量客觀評價
光學系統大口徑攝影鏡頭設計原理
超平面光學元件在寬帶熱成像中的應用
如何檢測光學系統的縱向色差

光學設計中的雜散光
光學系統無熱化技術的三個大類

基于超導單光子探測器的紅外光學系統噪聲分析和優化






 工商網監
工商網監
評論