") 讓我們從ADAS開始來了解自動駕駛
讓我們從ADAS開始來了解自動駕駛
隨著新基建戰(zhàn)略的持續(xù)落地,人工智能和汽車行業(yè)的飛速發(fā)展,無人駕駛技術已步入快車道。然而在實現真正自動駕駛之前,將經歷一個高級輔助駕駛(ADAS)時代,接下來讓我們從ADAS開始來了解自動駕駛。1、什么是ADAS?
根據維基百科,ADAS(Advanced Driver Assistance Systems)是高級輔助駕駛系統(tǒng)的縮寫。所謂高級輔助駕駛系統(tǒng),就是幫助人們更好地操控車輛的輔助裝置,一般提供更安全的駕駛條件或更舒適的用戶體驗。
ADAS涉及到12門技術,主要基于三種傳感器——攝像頭,雷達,激光雷達。在這12門技術中,組合出了感知,控制,決策這自動駕駛三大模塊。ADAS的歷史最早可以追溯到1948年,機械工程師Ralph Teetor發(fā)明了第一款“定速巡航”系統(tǒng)。
目前較為常用的ADAS可以按照功能分類,具體如下:
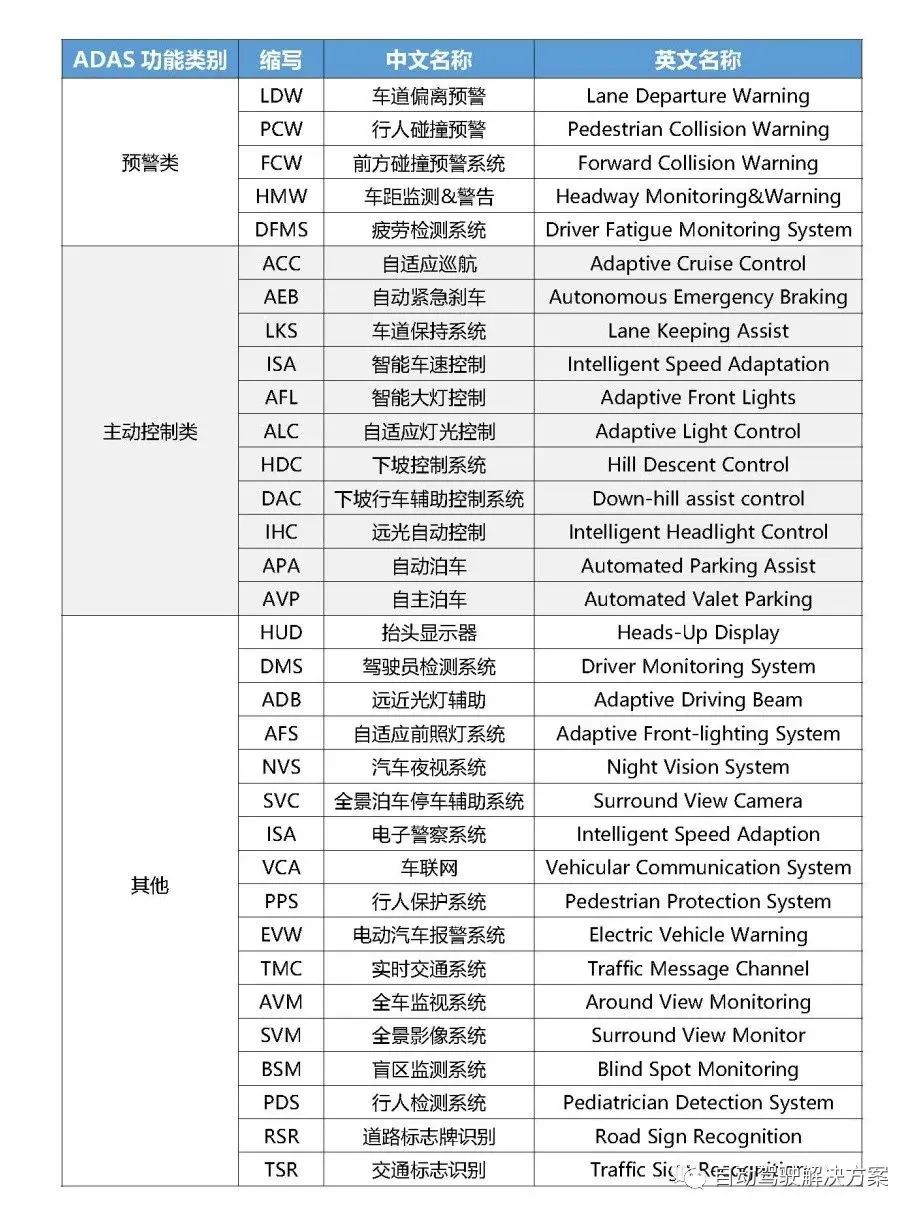
別被上面這些嚇到,ADAS的功能還遠不止這些,還有許多功能在開發(fā)中。比如法雷奧公司目前正在研發(fā)的AP&C(Automated Parking&Charging)等。 然而目前的ADAS不等于自動駕駛。ADAS僅僅是輔助駕駛,需要人類主導;而自動駕駛是人工智能主導,簡單來說就是不需要人操控方向盤。按照SAE(SAE International,Society of Automotive Engineers國際自動機工程師學會)的分級,自動駕駛技術分為L0-L5共六個等級:
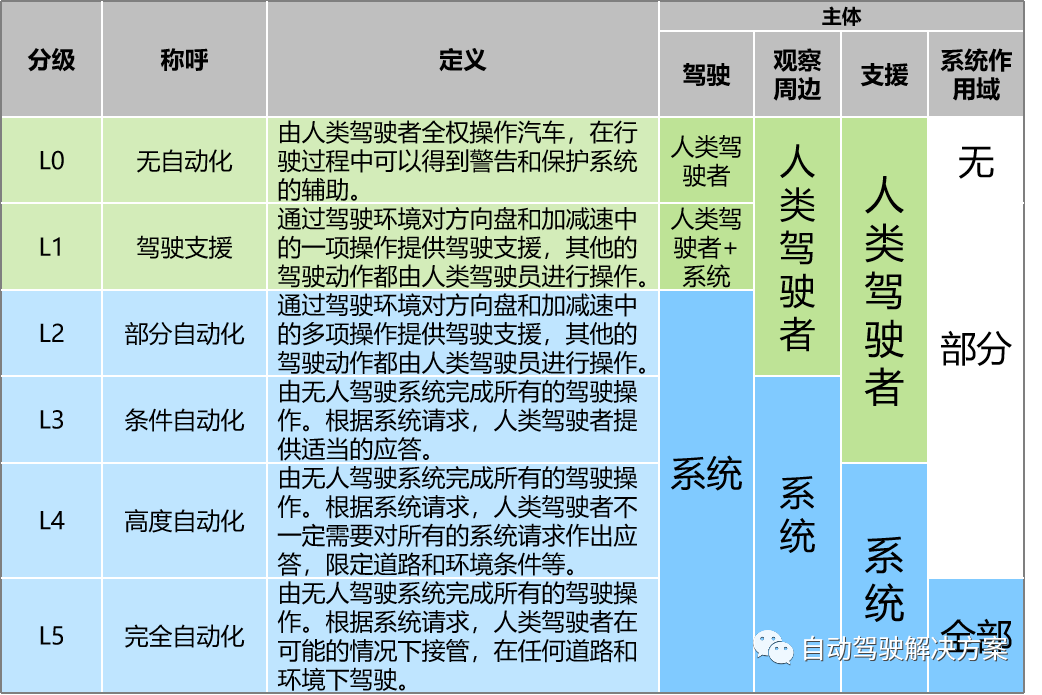
目前的ADAS處于L2到L3之間的自動駕駛水平。不過,僅僅是L2到L3級別的自動駕駛,我們也能夠感受到這些功能為我們出行帶來的便捷。那么 ADAS目前的市場如何?2、ADAS國內市場
據高工智能汽車研究報告顯示,今年上半年,純電動汽車ADAS搭載率陡增,從2019年的13.57%增長至39.41%。ADAS在純電動汽車的滲透率首次超過燃油車并超出平均水平。

ADAS功能中,AEB(自動緊急剎車)的搭載率增量最大,從2019年的15.12%增加到30.20%;熱門的ACC(自適應巡航)搭載率下滑,全速ACC開始上升,從2019年的2.8%增加到12.41%。APA(自動泊車)、AVM(全車監(jiān)視系統(tǒng))的搭載率增速最小。3、從熱門ADAS應用看ADAS產業(yè)鏈
AEB,ACC,APA,AVM等是目前最熱門的ADAS應用。下面將對他們進行詳細介紹。
(1)AEB:自動緊急制動
Autonomous EmergencyBrakingAEB 是一種汽車主動安全技術,主要由3大模塊構成:測距模塊,決策模塊,控制模塊。其中測距模塊的核心包括微波雷達、激光雷達和視頻系統(tǒng)等,它可以提供前方道路安全、準確、實時的圖像和路況信息。AEB系統(tǒng)采用雷達測出與前車或者障礙物的距離,然后利用數據分析模塊將測出的距離與警報距離、安全距離進行比較,小于警報距離時就進行警報提示,而小于安全距離時即使在駕駛員沒有來得及踩制動踏板的情況下,AEB系統(tǒng)也會啟動,使汽車自動制動,從而為安全出行保駕護航。
(2)ACC:自適應巡航控制系統(tǒng)
Adaptive Cruise Control
自適應巡航控制系統(tǒng)是一種智能化的自動控制系統(tǒng),它是在早已存在的巡航控制技術的基礎上發(fā)展而來的。在車輛行駛過程中,安裝在車輛前部的車距傳感器(雷達)持續(xù)掃描車輛前方道路,同時輪速傳感器采集車速信號。當與前車之間的距離過小時,ACC控制單元可以通過與制動防抱死系統(tǒng)、發(fā)動機控制系統(tǒng)協(xié)調動作,使車輪適當制動,并使發(fā)動機輸出功率下降,讓車輛與前方車輛始終保持安全距離。 自適應巡航系統(tǒng)可根據駕駛員設定的目標速度及與前車的相對距離,自動調整車速。這是通過安裝在車輛前部的車距傳感器,持續(xù)掃描車輛前方道路來得知前車的車速與相對距離,行駛中會自動偵測車速,當與前車的距離越來越小時,會對應調整自身車速,與前方車輛保持安全距離,減少碰撞意外的發(fā)生,也就是所謂的高級版自動巡航系統(tǒng),目前許多車款上都已可看見此系統(tǒng)的蹤影。(3)APA 自動泊車輔助
Automated Parking Assistance泊車輔助系統(tǒng)通過安裝在車身上的攝像頭,超聲波傳感器,以及紅外傳感器,探測停車位置,繪制停車地圖,并實時動態(tài)規(guī)劃泊車路徑,將汽車指引或者直接操控方向盤駛入停車位置。停車輔助系統(tǒng)又分為 2種,分別是主動式與被動式,前者系統(tǒng)自動控制方向盤以幫助駕駛完成停車,當然油門、剎車與檔位切換還是要車主自行操控。后者則是以影像(攝影機)與影音(超音波)為感測單元所組成的,提供更多車身周圍信息給車主掌握,減少碰撞機會。(4)AVM 全車監(jiān)視系統(tǒng)
Around View Monitor通過多個超大廣角魚眼鏡頭拍攝圖像,然后經過數據處理對拍攝圖像進行畸變矯正以及拼接,形成周圍影象。多用于汽車系統(tǒng)中,為駕駛員提供車身四周的俯視圖像,消除駕駛員的視野盲區(qū),泊車時可提供有效的視覺輔助功能。 從上面介紹的4個ADAS應用,我們可以將感知類ADAS應用歸納為“感知—判斷—執(zhí)行”這3個過程。根據這3個過程,就可以對自動駕駛產業(yè)鏈有個初步的認知。 在感知過程中:由于汽車是許多零件拼湊而成的機械件,那么汽車想要感知外界環(huán)境,就需要依靠各類的傳感器了。傳感器搭載的數量越多,汽車就能夠收獲到更多的信息。 傳感器主要應用的是攝像頭+雷達的組合,該組合能夠實現測距和識別兩種功能,且易互補。判斷主要依靠軟件平臺搭載的不同算法。執(zhí)行則主要依靠車載電子控制平臺,智能架構等電子硬件設備。 最后可以通過下圖來了解ADAS產業(yè)鏈。
-
adas
+關注
關注
309文章
2189瀏覽量
208750 -
激光雷達
+關注
關注
968文章
4003瀏覽量
190133 -
自動駕駛
+關注
關注
784文章
13899瀏覽量
166703
原文標題:了解自動駕駛,從ADAS開始
文章出處:【微信號:Imgtec,微信公眾號:Imagination Tech】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
光庭信息自動駕駛系統(tǒng)亮相CES 2025


自動駕駛汽車安全嗎?


自動駕駛HiL測試方案案例分析--ADS HiL測試系統(tǒng)#ADAS #自動駕駛 #VTHiL





康謀分享 | 直面AD/ADAS快速開發(fā)挑戰(zhàn):IVEX自動駕駛場景管理及分析平臺!






 工商網監(jiān)
工商網監(jiān)
評論