 一文解析深度學習的優算方法
一文解析深度學習的優算方法
神經網絡的學習的目的是找到使損失函數的值盡可能小的參數。這是尋找最優參數的問題,解決這個問題的過程稱為最優化(optimization)。遺憾的是,神經網絡的最優化問題非常難。這是因為參數空間非常復雜,無法輕易找到最優解(無法使用那種通過解數學式一下子就求得最小值的方法)。而且,在 深度神經網絡中,參數的數量非常龐大,導致最優化問題更加復雜。
為了找到最優參數,我們將參數的梯度(導數)作為了線索。 使用參數的梯度,沿梯度方向更新參數,并重復這個步驟多次,從而逐漸靠近最優參數,這個過程稱為隨機梯度下降法(stochastic gradient descent),簡稱SGD。SGD是一個簡單的方法,不過比起胡亂地搜索參數空間,也算是“聰明”的方法。
打個比方: 有一個性情古怪的探險家。他在廣袤的干旱地帶旅行,堅持尋找幽 深的山谷。他的目標是要到達最深的谷底(他稱之為“至深之地”)。這 也是他旅行的目的。并且,他給自己制定了兩個嚴格的“規定”:一個 是不看地圖;另一個是把眼睛蒙上。因此,他并不知道最深的谷底在這個廣袤的大地的何處,而且什么也看不見。在這么嚴苛的條件下,這位 探險家如何前往“至深之地”呢?他要如何邁步,才能迅速找到“至深 之地”呢?
尋找最優參數時,我們所處的狀況和這位探險家一樣,是一個漆黑的世界。我們必須在沒有地圖、不能睜眼的情況下,在廣袤、復雜的地形中尋找 “至深之地”。大家可以想象這是一個多么難的問題。
在這么困難的狀況下,地面的坡度顯得尤為重要。探險家雖然看不到周 圍的情況,但是能夠知道當前所在位置的坡度(通過腳底感受地面的傾斜狀況)。 于是,朝著當前所在位置的坡度最大的方向前進,就是SGD的策略。勇敢的探險家心里可能想著只要重復這一策略,總有一天可以到達“至深之地”。
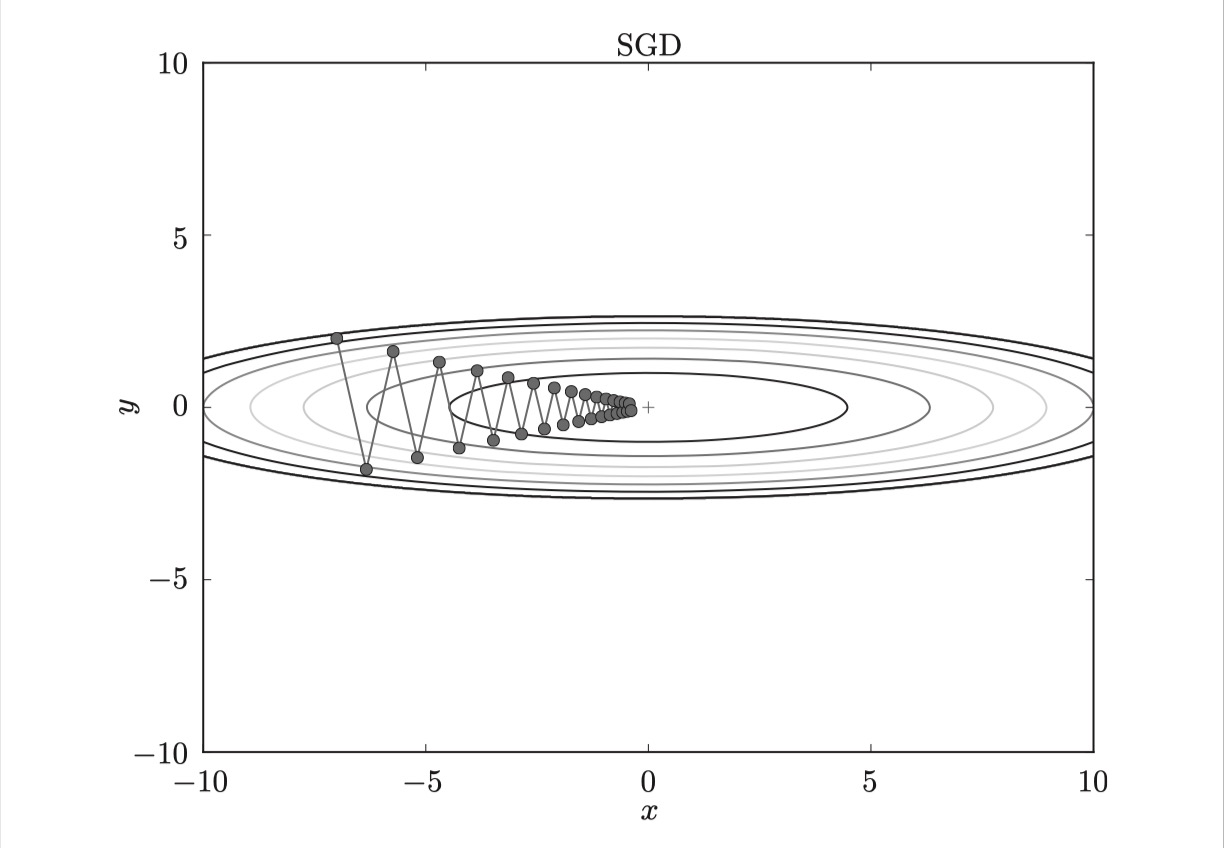
SGD
用數學式將SGD可以寫成如下形式:

為需要更新的權重參數,?L?W\frac{\partial L}{\partial W}?W?L為損失函數LLL關于WWW的梯度。η\etaη表示學習率,一般會取0.01或0.001這些事先決定好的值。式中的←\leftarrow←表示用右邊的值更新左邊的值。
缺點:
(1)SGD 因為更新比較頻繁,會造成 cost function 有嚴重的震蕩。
SGD呈 “之”字形移動。這是一個相當低效的路徑。也就是說, SGD的缺點是, 如果函數的形狀非均向(anisotropic),比如呈延伸狀,搜索的路徑就會非常低效。因此,我們需要比單純朝梯度方向前進的SGD更聰 明的方法。 SGD低效的根本原因是, 梯度的方向并沒有指向最小值的方向。
(2)容易收斂到局部最優,并且容易被困在鞍點。

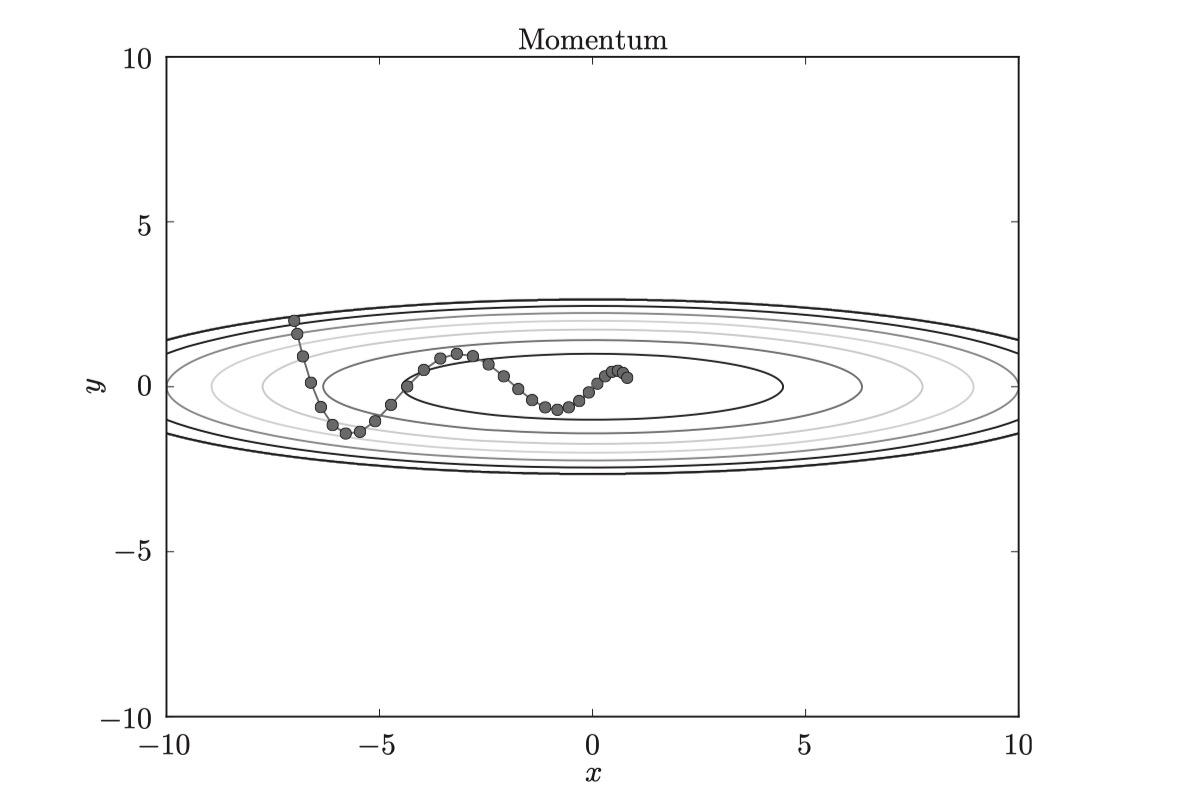
Momentum
Momentum算法借用了物理中的動量概念,它模擬的是物體運動時的慣性,即更新的時候在一定程度上保留之前更新的方向,同時利用當前batch的梯度微調最終的更新方向。這樣一來,可以在一定程度上增加穩定性,從而學習地更快,并且還有一定擺脫局部最優的能力:

和前面的SGD一樣, WWW表示要更新的權重參數, 表示損失函數關于WWW的梯度,ηηη表示學習率。 這里新出現了一個變量vvv,對應物理上的速度。 式(1)表示了物體在梯度方向上受力,在這個力的作用下,物體的速度增加這一物理法則。Momentum方法給人的感覺就像是小球在地面上滾動。

式(1)中有αvαvαv這一項。在物體不受任何力時,該項承擔使物體逐漸減速的任務(α設定為0.9之類的值),對應物理上的地面摩擦或空氣阻力。
和SGD相比, “之”字形的“程度”減輕了。這是因為雖然x軸方向上受到的力非常小,但是一直在同一方向上受力,所以朝同一個方向會有一定的加速。反過來,雖然y軸方向上受到的力很大,但是因為交互地受到正方向和反方向的力,它們會互相抵消,所以y軸方向上的速度不穩定。因此,和SGD時的情形相比, 可以更快地朝x軸方向靠近,減弱“之”字形的變動程度。
AdaGrad
在神經網絡的學習中,學習率(數學式中記為ηηη)的值很重要。學習率過小, 會導致學習花費過多時間;反過來,學習率過大,則會導致學習發散而不能 正確進行。
在關于學習率的有效技巧中,有一種被稱為學習率衰減(learning rate decay) 的方法,即隨著學習的進行,使學習率逐漸減小。實際上,一開始“多” 學,然后逐漸“少”學的方法,在神經網絡的學習中經常被使用。
逐漸減小學習率的想法,相當于將“全體”參數的學習率值一起降低。 而AdaGrad進一步發展了這個想法,針對“一個一個”的參數,賦予其“定 制”的值。
AdaGrad會為參數的每個元素適當地調整學習率, 與此同時進行學習 (AdaGrad的Ada來自英文單詞Adaptive,即“適當的”的意思)。下面,讓我們用數學式表示AdaGrad的更新方法。
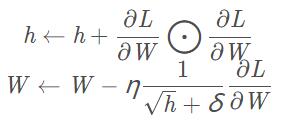
其中,hhh為梯度累積變量,它保存了以前的所有梯度值的平方和,hhh的初始值為0。?\bigodot?表示對應矩陣元素的乘法,η\etaη表示學習率,δ\deltaδ為很小的一個數值,是為了防止分母為0。然后,在更新參數時,通過乘以 1h√\frac{1}{\sqrt h}h1,就可以調整學習的尺度。這意味著, 參數的元素中變動較大(被大幅更新)的元素的學習率將變小。也就是說, 可以按參數的元素進行學習率衰減,使變動大的參數的學習率逐漸減小。
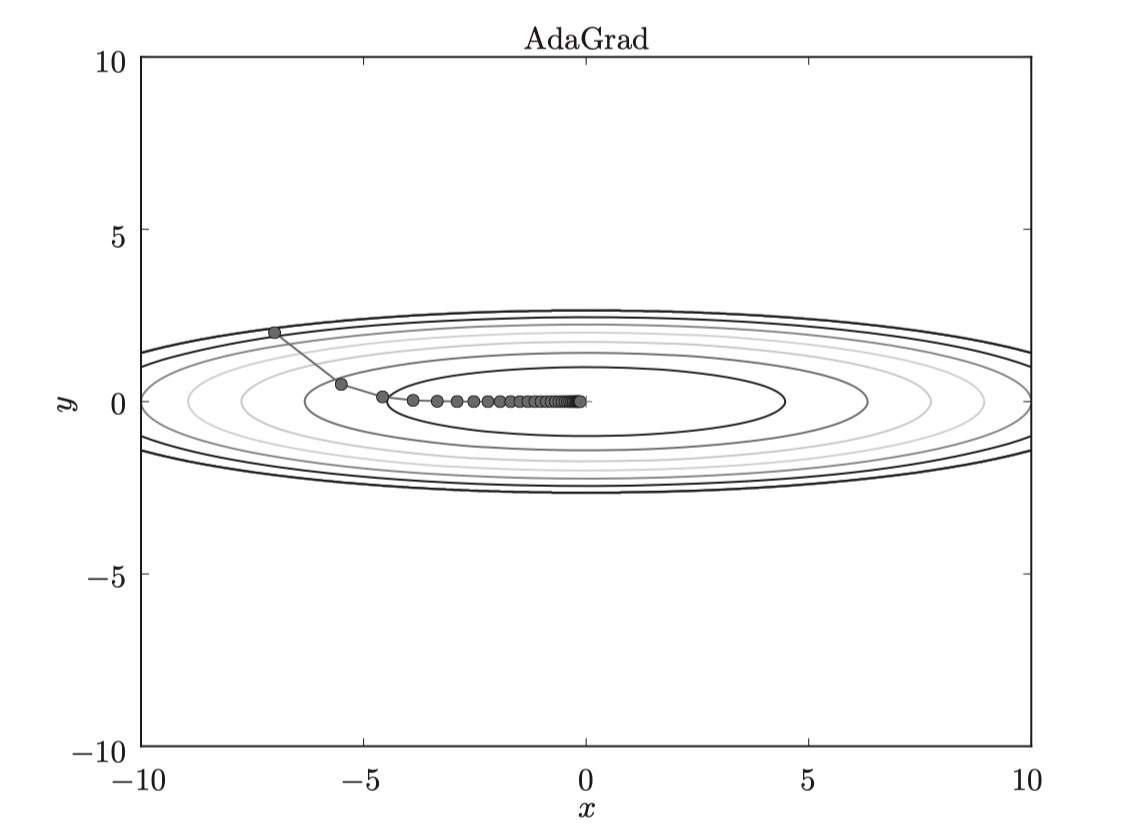
由圖可知,函數的取值高效地向著最小值移動。由于y軸方 向上的梯度較大,因此剛開始變動較大,但是后面會根據這個較大的變動按 比例進行調整,減小更新的步伐。因此,y軸方向上的更新程度被減弱,“之” 字形的變動程度有所衰減。
RMSProp
AdaGrad會記錄過去所有梯度的平方和。因此,學習越深入,更新 的幅度就越小。實際上,如果無止境地學習,更新量就會變為 0, 完全不再更新。為了改善這個問題,可以使用 RMSProp 方法。RMSProp方法并不是將過去所有的梯度一視同仁地相加,而是逐漸 地遺忘過去的梯度,在做加法運算時將新梯度的信息更多地反映出來。 這種操作從專業上講,稱為“指數移動平均”,呈指數函數式地減小過去的梯度的尺度。
其中ppp一般可取0.9,其它參數和AdaGrad一致。
Adam
Momentum參照小球在碗中滾動的物理規則進行移動,AdaGrad為參數的每個元素適當地調整更新步伐。如果將這兩個方法融合在一起會怎么樣呢?這就是Adam方法的基本思路。直觀地講,Adam就是融合了Momentum和AdaGrad的方法。通過組合前面兩個方法的優點,有望實現參數空間的高效搜索。此外,進行超參數的“偏置校正”也是Adam的特征。Adam結合了Adagrad善于處理稀疏梯度和RMSprop善于處理非平穩目標的優點。

可以看出,直接對梯度的矩估計對內存沒有額外的要求,而且可以根據梯度進行動態調整,而?m?tn?t√+δ-\frac{\hat m_t}{\sqrt {\hat n_t} + \delta }?n^t+δm^t對學習率η\etaη形成了一個動態約束,而且有明確的范圍。
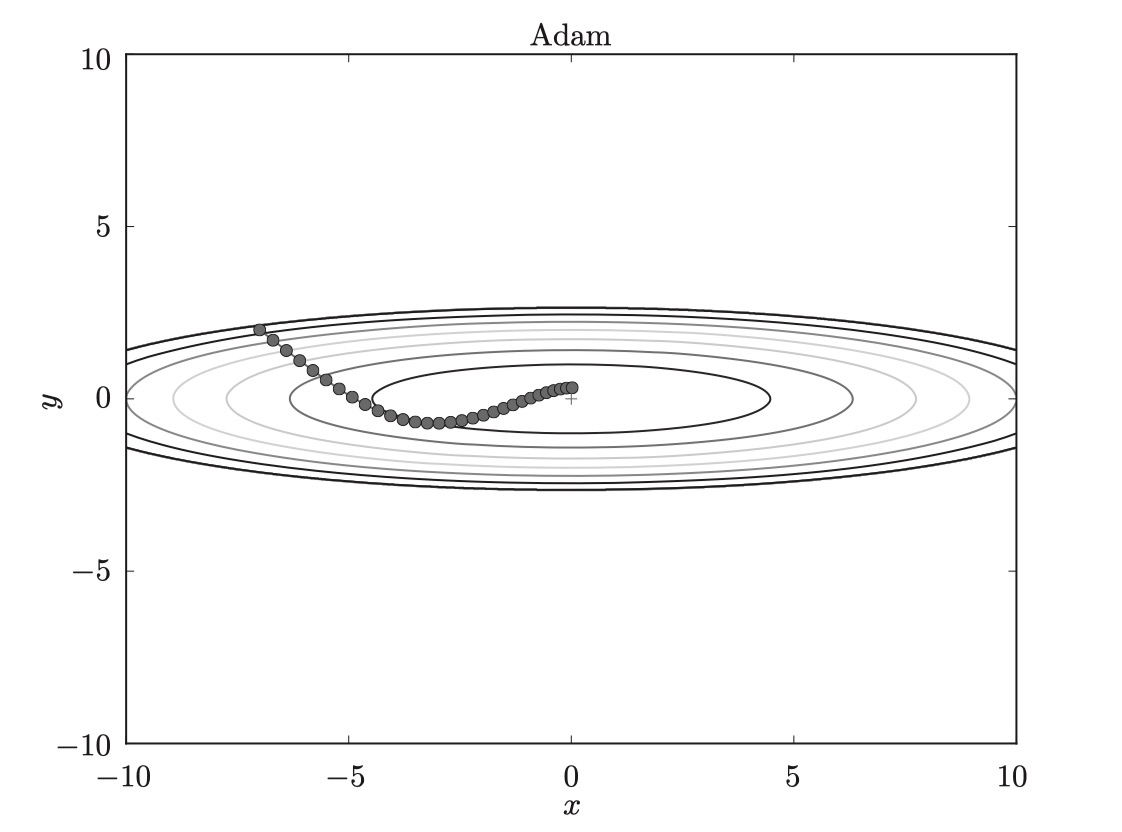
如圖,基于 Adam 的更新過程就像小球在碗中滾動一樣。雖然 Momentun 也有類似的移動,但是相比之下, Adam的小球左右搖晃的程度有所減輕。這得益于學習的更新程度被適當地調整了。
-
深度學習
+關注
關注
73文章
5511瀏覽量
121360
原文標題:【知識點】長文超詳講解深度學習中你總是掌握不牢的若干知識點
文章出處:【微信號:zenRRan,微信公眾號:深度學習自然語言處理】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

基于深度學習的異常檢測的研究方法
深度學習技術的開發與應用

一文解讀深度學習的發展
為什么學習深度學習需要使用PyTorch和TensorFlow框架

一文讀懂何為深度學習1






 工商網監
工商網監
評論