") 基于二維MEMS掃描振鏡的激光雷達(dá)設(shè)計(jì)了發(fā)射光學(xué)系統(tǒng)和接收光學(xué)系統(tǒng)
基于二維MEMS掃描振鏡的激光雷達(dá)設(shè)計(jì)了發(fā)射光學(xué)系統(tǒng)和接收光學(xué)系統(tǒng)
摘要:近年來人們對(duì)具有安全駕駛、智能控制功能的汽車需求增長(zhǎng),使智能駕駛汽車快速發(fā)展起來,激光雷達(dá)作為智能駕駛的核心傳感器之一得到廣泛的關(guān)注,其中MEMS激光雷達(dá)具有高幀率、高分辨率、體積小、成本低的優(yōu)點(diǎn),是國(guó)內(nèi)外車載激光雷達(dá)的主要發(fā)展趨勢(shì)之一。光學(xué)系統(tǒng)是MEMS激光雷達(dá)重要組成部分之一,分為發(fā)射光學(xué)系統(tǒng)和接收光學(xué)系統(tǒng),本文基于鏡面直徑5 mm的二維MEMS振鏡設(shè)計(jì)了發(fā)射光學(xué)系統(tǒng),將25 W的半導(dǎo)體激光器準(zhǔn)直為弧矢方向發(fā)散半角為1 mrad,子午方向發(fā)散半角為3 mrad的光束;設(shè)計(jì)了大相對(duì)孔徑為1:1、焦距為11.01 mm的鏡頭作為接收鏡頭,并提出采用放大倍率為2.2的纖維光錐與16線APD陣列探測(cè)器耦合,擴(kuò)大接收光學(xué)系統(tǒng)的視場(chǎng);APD陣列探測(cè)器采用選通模式,提高雷達(dá)系統(tǒng)的信噪比。基于此設(shè)計(jì)結(jié)果搭建激光雷達(dá)樣機(jī),實(shí)驗(yàn)驗(yàn)證系統(tǒng)探測(cè)距離可達(dá)45 m,全視場(chǎng)角40? × 10?。結(jié)果表明系統(tǒng)可一定程度上提高激光雷達(dá)探測(cè)距離和視場(chǎng)角。
0引言
激光雷達(dá)是一種通過使用激光束測(cè)量目標(biāo)距離的測(cè)量方法,在航空航天、軍事、氣象等國(guó)民經(jīng)濟(jì)生活中得以廣泛的應(yīng)用。尤其在智能駕駛領(lǐng)域,三維成像激光雷達(dá)是實(shí)現(xiàn)無人駕駛的關(guān)鍵技術(shù)之一。目前激光雷達(dá)主要的技術(shù)方案有固態(tài)激光雷達(dá)、混合固態(tài)激光雷達(dá)、機(jī)械式激光雷達(dá),其中混合固態(tài)激光雷達(dá)采用MEMS(Micro Electro Mechanical System)掃描振鏡作為掃描機(jī)構(gòu),主要系統(tǒng)包括發(fā)射系統(tǒng)、接收系統(tǒng)和信號(hào)處理系統(tǒng),可實(shí)現(xiàn)三維成像,具有遠(yuǎn)距離,高幀率,高分辨率的優(yōu)點(diǎn),并且有望實(shí)現(xiàn)激光雷達(dá)的小型化和低成本化,是國(guó)內(nèi)外車載激光雷達(dá)發(fā)展的主要趨勢(shì)之一。
光學(xué)系統(tǒng)作為MEMS激光雷達(dá)重要組成部分,分為發(fā)射光學(xué)系統(tǒng)和接收光學(xué)系統(tǒng),發(fā)射光學(xué)系統(tǒng)的主要任務(wù)是減小發(fā)射光束的發(fā)散角,使其光束質(zhì)量更好,主要設(shè)計(jì)難點(diǎn)是MEMS掃描振鏡的鏡面面積較小,限制光束的直徑,直接影響準(zhǔn)直光束的發(fā)散角。接收光學(xué)系統(tǒng)主要任務(wù)是在保證口徑的前提下接收更大視場(chǎng)范圍內(nèi)的回波光束,主要設(shè)計(jì)難點(diǎn)是光電探測(cè)器面積有限,會(huì)限制接收光學(xué)系統(tǒng)相對(duì)孔徑和視場(chǎng)。
目前國(guó)內(nèi)外研究者基于MEMS掃描振鏡提出了許多不同的光學(xué)方案,Ito等開發(fā)了配備單光子CMOS焦平面探測(cè)器的MEMS激光雷達(dá),可以測(cè)量距離高達(dá)25 m,全視場(chǎng)角為45? × 11?。Jae-Hyoung Park利用間接時(shí)間飛行法,搭建了基于直徑3 mm的二維MEMS掃描振鏡的激光雷達(dá)系統(tǒng),實(shí)現(xiàn)了2 m、4 m、6 m、8 m距離處多目標(biāo)物體的距離測(cè)量及三維成像。
邱琪等提出一種6個(gè)掃描子系統(tǒng)組成的全向激光探測(cè)雷達(dá)結(jié)構(gòu),其中發(fā)射光學(xué)天線將MEMS鏡±10 °的掃描角擴(kuò)展到±30°;接收天線物鏡F數(shù)為3,視場(chǎng)角為67 °,視場(chǎng)角范圍內(nèi)接收到的激光回波經(jīng)過接收天線在探測(cè)器上所成的半像高小于1 mm。易可佳等研制的一種小型化實(shí)時(shí)成像的MEMS激光雷達(dá)樣機(jī),其距離分辨率為1 cm,視場(chǎng)角為24°。
本文根據(jù)基于二維MEMS掃描振鏡的激光雷達(dá)系統(tǒng)的特性,設(shè)計(jì)了一套激光雷達(dá)的光學(xué)系統(tǒng),包括激光雷達(dá)發(fā)射光學(xué)系統(tǒng)和匹配激光雷達(dá)大口徑、大視場(chǎng)探測(cè)需求與探測(cè)器小接收面積的接收光學(xué)系統(tǒng),并搭建了激光雷達(dá)原理樣機(jī)。
1激光雷達(dá)結(jié)構(gòu)
基于二維MEMS掃描振鏡的激光雷達(dá)系統(tǒng)采用飛行時(shí)間法測(cè)距,整體光路采用收發(fā)并行光路系統(tǒng),光源為半導(dǎo)體脈沖激光器,探測(cè)器為高靈敏度的APD陣列探測(cè)器,如圖1。激光雷達(dá)工作時(shí),控制系統(tǒng)使激光器發(fā)出高頻率脈沖激光,經(jīng)由準(zhǔn)直系統(tǒng)準(zhǔn)直為發(fā)散角較小的光束,再控制二維MEMS掃描振鏡的偏轉(zhuǎn)角,改變出射光束方向,逐點(diǎn)掃描目標(biāo);目標(biāo)反射的回波光束經(jīng)過接收光學(xué)系統(tǒng)會(huì)聚到APD陣列探測(cè)器表面,APD陣列探測(cè)器上對(duì)應(yīng)的單元被選通以接收光信號(hào)。控制系統(tǒng)基于時(shí)間飛行法(ToF)準(zhǔn)確計(jì)算激光飛行往返路徑的時(shí)間來實(shí)現(xiàn)距離測(cè)量。
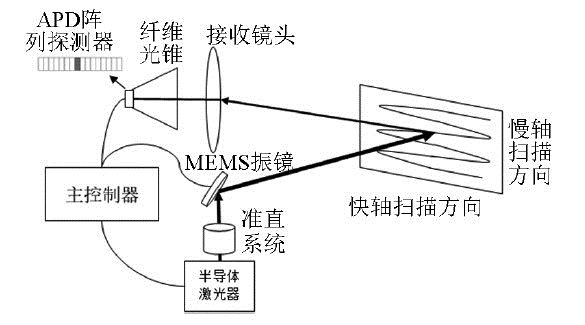
圖1 基于二維MEMS掃描振鏡的激光雷達(dá)系統(tǒng)示意圖
激光和微波同屬電磁波,根據(jù)微波雷達(dá)的作用距離方程可得激光雷達(dá)方程為:

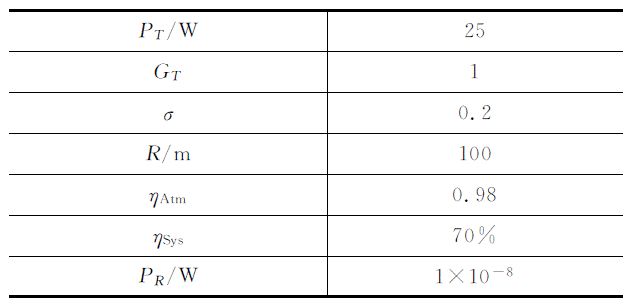
式中,PR是接收激光功率;PT是發(fā)射激光功率;GT是發(fā)射天線增益;σ是目標(biāo)散射系數(shù);D是接收孔徑;R是激光雷達(dá)到目標(biāo)的距離;ηAtm是單程大氣傳輸系數(shù);ηSys是激光雷達(dá)的光學(xué)系統(tǒng)的傳輸系數(shù)。根據(jù)激光雷達(dá)距離公式可知,為激光雷達(dá)設(shè)計(jì)合適的光學(xué)系統(tǒng)是實(shí)現(xiàn)激光雷達(dá)遠(yuǎn)距離、大視場(chǎng)的必要條件。其中發(fā)射光學(xué)系統(tǒng)應(yīng)盡量選用大功率激光器,且發(fā)射光束需發(fā)散角較小,遠(yuǎn)場(chǎng)能量集中;若要求激光雷達(dá)探測(cè)距離大于100 m,假設(shè)激光雷達(dá)作用距離公式中各個(gè)參量的值如表1所示,則接收光學(xué)系統(tǒng)的入瞳直徑需大于10 mm。考慮大陣列的APD探測(cè)器成本較高,為降低激光雷達(dá)成本,采用Hamamatsu公司S13645-01CR型1 × 16線陣APD探測(cè)器,單個(gè)APD面積1 mm × 0.4 mm,總的面積為1 mm × 8 mm。當(dāng)接收光學(xué)系統(tǒng)的入瞳直徑2d為10 mm,視場(chǎng)角θ為40° × 10°,根據(jù)f =d/tanθ,則接收光學(xué)系統(tǒng)的焦距為2.84 mm,即要求接收光學(xué)系統(tǒng)的相對(duì)孔徑(2d/f)為10:2.84,光學(xué)鏡頭難以滿足要求。因此,本文提出在光電探測(cè)器和接收光學(xué)系統(tǒng)間加入纖維光錐平衡接收光學(xué)系統(tǒng)在光電探測(cè)器面積一定的情況下對(duì)大口徑和大視場(chǎng)的需求,并且APD陣列探測(cè)器采用選通模式,降低大相對(duì)孔徑的接收鏡頭接收到的背景光的干擾,提高系統(tǒng)的信噪比。
表1 距離公式變量值
1.1發(fā)射光學(xué)系統(tǒng)設(shè)計(jì)
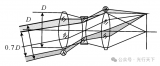
激光雷達(dá)光源為波長(zhǎng)905 nm的脈沖半導(dǎo)體激光器,該激光器輸出功率為25 W,弧矢方向光斑尺寸為15 μm,發(fā)散角為25°(FWHM),子午方向光斑尺寸為74μm,發(fā)散角為10°(FWHM)。半導(dǎo)體激光器的弧矢(平行于結(jié)平面方向)、子午(垂直于結(jié)平面方向)方向發(fā)散角不同,故采用兩個(gè)母線相互垂直的柱面鏡對(duì)弧矢、子午兩個(gè)方向分別準(zhǔn)直。根據(jù)高斯光束遠(yuǎn)場(chǎng)發(fā)散角定義θ=λ/πω0,準(zhǔn)直后束腰半徑越大,MEMS振鏡的鏡面尺寸需越大,而MEMS振鏡的掃描頻率則會(huì)隨之減小,綜合考慮激光雷達(dá)對(duì)準(zhǔn)直后光束小發(fā)散角和MEMS振鏡高掃描頻率的要求,采用直徑5 mm的MEMS振鏡,其快軸掃描頻率為1.2KHz,慢軸掃描頻率在10 Hz左右。
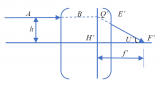
利用光學(xué)仿真軟件,建立柱面鏡準(zhǔn)直的仿真模型,如圖2所示。在距離光源45 mm的地方放置了一塊30°傾斜、直徑5 mm的反射鏡,其等效于零掃描角時(shí)的MEMS振鏡。
根據(jù)半導(dǎo)體激光器的發(fā)光特性,設(shè)計(jì)使用焦距為4.62 mm的非球面柱面鏡進(jìn)行子午方向的準(zhǔn)直;設(shè)計(jì)使用焦距為13.91 mm的球面柱面鏡進(jìn)行弧矢方向的準(zhǔn)直。
仿真得到準(zhǔn)直后距離反射鏡不同距離的光斑,取峰值功率1/e2處光斑半徑,將散點(diǎn)擬合為直線,該直線近似為雙曲線的漸近線,直線方程為
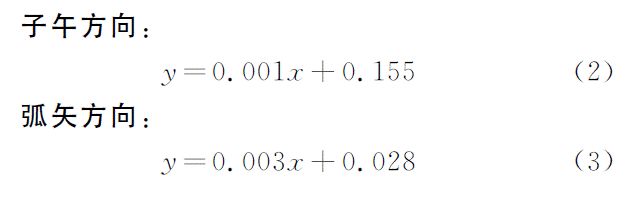
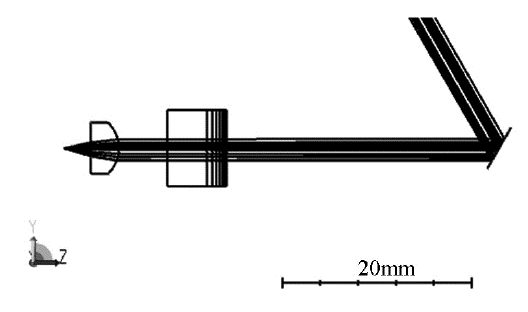
圖2 光學(xué)仿真模型
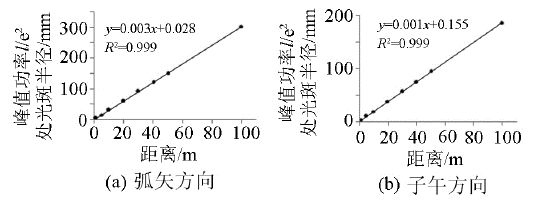
圖3 光斑半徑隨光傳播距離的曲線
直線斜率為準(zhǔn)直后光束發(fā)散角的正切值,則
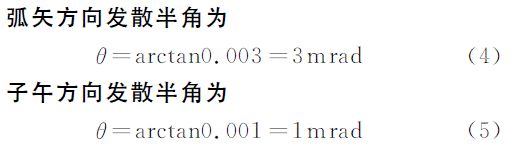

圖4 距離MEMS振鏡100 m時(shí)激光光斑截面圖
得到準(zhǔn)直后子午方向發(fā)散半角為1 mrad,弧矢方向發(fā)散半角為3 mrad,如圖3所示。圖4給出了仿真模型中距離MEMS振鏡100 m的探測(cè)器接收到的激光光斑,該光斑總能量為24.01 W,即有96%以上的激光能量經(jīng)由MEMS振鏡反射,僅有包含約4%的激光能量的光束未入射到MEMS振鏡上,沿原方向出射。
1.2接收光學(xué)系統(tǒng)設(shè)計(jì)
如前文所述,為滿足激光雷達(dá)遠(yuǎn)距離光信號(hào)的探測(cè)對(duì)大口徑、大視場(chǎng)的要求,在接收鏡頭和APD陣列探測(cè)器間加入放大倍率為2.2的成像纖維光錐作為中繼元件。該纖維光錐由數(shù)千上萬根錐形光纖規(guī)則排列組合而成,每根錐形光纖芯徑小于6 μm,纖維光錐入射端面接收到的圖像被分解為與錐形光纖排列相對(duì)應(yīng)的像元;規(guī)則排列的錐形光纖將所攜帶的像元信息一一對(duì)應(yīng)地傳遞到纖維光錐的另一端;像元在傳遞過程中隨錐形光纖直徑的變化被放大或縮小,在出射端面按原排列方式組合成像。本文中纖維光錐口徑小的一端直徑10 mm,緊貼APD探測(cè)器,口徑大的一端直徑22 mm,位于接收光學(xué)鏡頭的像方焦平面位置。
綜合考慮接收光學(xué)系統(tǒng)的口徑和視場(chǎng),接收光學(xué)的設(shè)計(jì)指標(biāo)如表2。
表2 接收鏡頭設(shè)計(jì)指標(biāo)
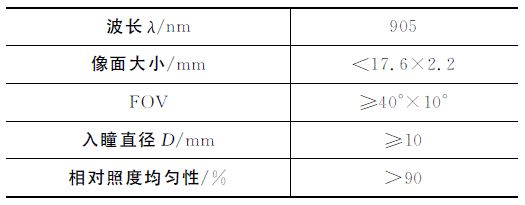
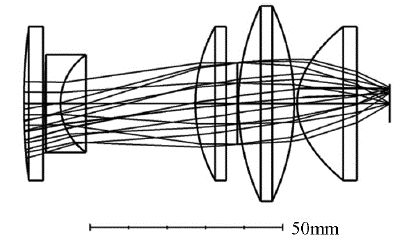
圖5 接收鏡頭仿真模型
在光學(xué)仿真軟件中選擇反遠(yuǎn)距型鏡頭為初始結(jié)構(gòu),設(shè)置評(píng)價(jià)函數(shù),選用市場(chǎng)上現(xiàn)有透鏡,優(yōu)化系統(tǒng),最終得到接收鏡頭的結(jié)構(gòu)如圖5所示,共有5片鏡片組成,其中最后一個(gè)透鏡為非球面透鏡。
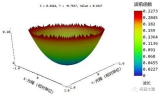
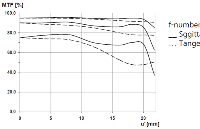
接收鏡頭焦距為11.01 mm,視場(chǎng)角為40 ° × 10 °,相對(duì)孔徑1:1,系統(tǒng)總長(zhǎng)95.08 mm。圖6為接收鏡頭像平面的光跡圖,像面大小為5 mm × 2.2 mm,x方向從左至右依次為視場(chǎng)(0 °,0 °)、(0 °,3.5 °)、(0 °,5 °)的光線在像平面所成光斑,y方向從下至上依次為(0 °,0 °)、(14 °,0 °)、(20 °,0 °)的光線在像平面所成光斑,x方向像高1.10 mm,y方向像高為4.17mm。圖7為像平面的相對(duì)照度均勻性,20 °視場(chǎng)角范圍內(nèi)像平面的相對(duì)照度均勻性在90%以上。

圖6 像平面光跡圖
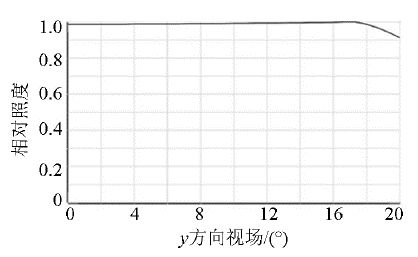
圖7 像平面相對(duì)照度均勻性
2實(shí)驗(yàn)結(jié)果
根據(jù)以上仿真設(shè)計(jì)結(jié)果,結(jié)合機(jī)械設(shè)計(jì),搭建了激光雷達(dá)的樣機(jī),如圖8所示。其中,纖維光錐直接緊貼在拆除封裝窗口的APD陣列探測(cè)器表面,中間的空隙以松柏油填充,如圖9,可在纖維光錐的大端面看到APD陣列探測(cè)器表面的放大像,耦合效率約為74.14%。
圖8 激光雷達(dá)樣機(jī)
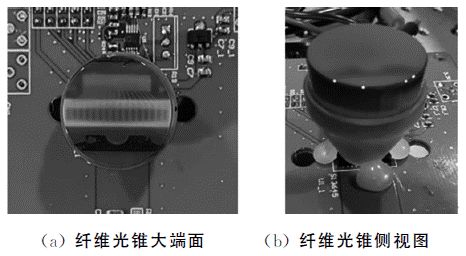
圖9 APD陣列探測(cè)器與纖維光錐耦合模塊
圖10 實(shí)驗(yàn)拍攝光斑圖
在距離發(fā)射光學(xué)系統(tǒng)6.67 m距離的光屏上拍攝了激光光斑圖,如圖10,該光斑的光斑半徑為12.81 mm × 26.78 mm,根據(jù)tanθ=r/d,激光的發(fā)散角為0.11° × 0.23 °。
在距離激光雷達(dá)垂直距離1.5 m的前方有一面白墻,接收光學(xué)系統(tǒng)的光軸與墻面垂直,當(dāng)發(fā)射光學(xué)系統(tǒng)的掃描角為(0 °,0 °)、(5 °,0 °)、(0 °,5 °)、(0 °,10 °)、(0 °,15 °)、(0 °,20 °)時(shí),對(duì)應(yīng)選通APD探測(cè)器從左至右第8個(gè)、第8個(gè)、第7個(gè)、第5個(gè)、第3個(gè)、第1個(gè)單元,APD探測(cè)器接收到的回波信號(hào)幅值及其修正后電壓幅值如表3所示,相應(yīng)的計(jì)算了修正后電壓幅值與其平均值的差值占其平均值的百分比均小于10%。結(jié)果表明該激光雷達(dá)的樣機(jī)視場(chǎng)角為40 ° × 10 °,接收系統(tǒng)像平面的照度均勻性大于90%。
表3 激光雷達(dá)不同視場(chǎng)回波信號(hào)測(cè)試結(jié)果

將激光雷達(dá)放置在一地下車庫(kù)測(cè)試,APD探測(cè)器選通第8個(gè)單元,發(fā)射光學(xué)系統(tǒng)掃描角為0 °,發(fā)射系統(tǒng)發(fā)出的激光脈沖照射在距離樣機(jī)45 m的一面白墻上時(shí),將接收系統(tǒng)可以接收到的回波信號(hào)連接在示波器上顯示如圖11所示,峰值電壓為4.45 V。
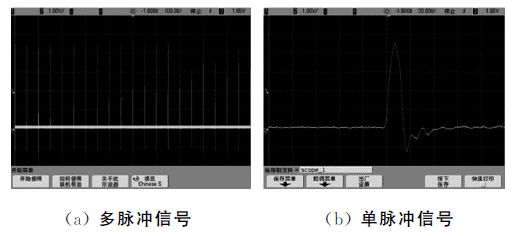
圖11 激光雷達(dá)回波信號(hào)
3結(jié)論
本文為基于二維MEMS掃描振鏡的激光雷達(dá)設(shè)計(jì)了發(fā)射光學(xué)系統(tǒng)和接收光學(xué)系統(tǒng)。系統(tǒng)選用直徑5 mm的MEMS掃描振鏡,利用柱面鏡將25W的半導(dǎo)體激光器,準(zhǔn)直為發(fā)散角為1 mrad(子午方向)和3 mrad(弧矢方向)的光束;以放大倍率2.2的纖維光錐作為接收鏡頭和APD陣列探測(cè)器的中繼元件,設(shè)計(jì)了焦距為11.01 mm、視場(chǎng)角40 ° × 10°的反遠(yuǎn)距鏡頭作為接收鏡頭,其相對(duì)孔徑1:1。APD陣列探測(cè)器采用選通模式避免大相對(duì)孔徑的接收光學(xué)系統(tǒng)接收到的干擾光降低雷達(dá)系統(tǒng)信噪比。基于仿真結(jié)果,搭建了激光雷達(dá)原理樣機(jī),實(shí)現(xiàn)45 m遠(yuǎn)目標(biāo)的探測(cè),系統(tǒng)全視場(chǎng)角40 ° × 10 °。該激光雷達(dá)系統(tǒng)一定程度上解決了大視場(chǎng)探測(cè)需求與探測(cè)器小接收面積的矛盾問題,若完善該雷達(dá)樣機(jī)的MEMS掃描振鏡驅(qū)動(dòng)系統(tǒng)、APD陣列探測(cè)器選通系統(tǒng)及數(shù)據(jù)處理系統(tǒng),有望實(shí)現(xiàn)三維成像激光雷達(dá)系統(tǒng)的搭建。
-
mems
+關(guān)注
關(guān)注
129文章
3931瀏覽量
190628 -
光學(xué)系統(tǒng)
+關(guān)注
關(guān)注
4文章
243瀏覽量
18312 -
激光雷達(dá)
+關(guān)注
關(guān)注
968文章
3972瀏覽量
189925
原文標(biāo)題:基于二維MEMS振鏡的激光雷達(dá)系統(tǒng)的光學(xué)設(shè)計(jì)
文章出處:【微信號(hào):MEMSensor,微信公眾號(hào):MEMS】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
高倍金相自動(dòng)測(cè)量顯微鏡無限遠(yuǎn)光學(xué)系統(tǒng)

共聚焦激光顯微鏡的光學(xué)系統(tǒng)解析
光學(xué)雷達(dá)和激光雷達(dá)的區(qū)別是什么
高質(zhì)量激光光束光學(xué)系統(tǒng)中的空間濾波
光學(xué)系統(tǒng)的像方基本參數(shù)結(jié)構(gòu)示意圖
工業(yè)鏡頭光學(xué)系統(tǒng)的成像質(zhì)量客觀評(píng)價(jià)
光學(xué)系統(tǒng)大口徑攝影鏡頭設(shè)計(jì)原理
如何檢測(cè)光學(xué)系統(tǒng)的縱向色差

光學(xué)設(shè)計(jì)中的雜散光
光學(xué)系統(tǒng)無熱化技術(shù)的三個(gè)大類
光學(xué)系統(tǒng)設(shè)計(jì)過程
光學(xué)系統(tǒng)的 MTF 與分辨率之間有什么關(guān)系?
大功率紅外光學(xué)系統(tǒng)中的雜散光及其數(shù)學(xué)模型與計(jì)算方法研究

基于超導(dǎo)單光子探測(cè)器的紅外光學(xué)系統(tǒng)噪聲分析和優(yōu)化

激光雷達(dá)上游壁壘高,國(guó)內(nèi)廠商優(yōu)先打開中游突破口 ?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論