 采用OpenWrt的基于H橋控制的移動機器人設計方案
采用OpenWrt的基于H橋控制的移動機器人設計方案
引言
近年來隨著人工智能技術、計算機技術等相關技術的發展,對移動機器人的研究越來越廣泛。本設計是采用OpenWrt操作系統的移動機器人,它可實現多種不同功能,如探測險情、巡視、圖像采集、定位、無線通信等。它還可以作為各種智能控制方法(包括動態避障、路徑規劃、群體協作策略)的良好載體,開展研究。
1 系統方案
采用2層架構。上層以ARM處理器S3C2440為核心,選用MINI2440開發板作為上層的主板,負責圖像采集,并將圖像通過Wi?Fi方式發送給遠端的PC機。Wi?Fi無線通信是利用PC機與無線路由器搭建環境平臺共同實現的。
下層是以51單片機為核心的單片機控制板,由51單片機及外圍電路組成。下層主要負責機器人移動控制,傳感器數據處理。51單片機通過I/O口輸出PWM信號控制直流電機的轉速和轉向,實現機器人的前進、停止、左轉和右轉。單片機接口電路上掛接了1個超聲波測距模塊、1個人體紅外感應模塊、1個步進電機模塊。超聲波測距模塊用來實現機器人避障。在嵌入式智能的前端安裝了一個步進電機,而超聲波測距模塊安置在步進電機的轉軸上,步進電機不停地來回轉動,超聲波測距模塊也隨之轉動。這樣用1個超聲波測距模塊就可實現多方位測距,從而減少了超聲波測距模塊的數量。
機器人主要由硬件系統和軟件系統構成。硬件系統主要包括:ARM處理器、單片機、外圍接口電路、機器人底盤以及電源等。其中ARM處理器是上層的核心,51單片機是下層的核心。軟件包括:嵌入式Linux操作系統、外設驅動程序、Linux應用程序以及單片機應用程序等。系統沒有選用通常的嵌入式Linux版本,而是另辟蹊徑,選用一種獨特的嵌入式Linux發行版之一OpenWrt作為操作系統。OpenWrt提供了一個完全可寫的文件系統及軟件包管理,它通過簡單易用的方式,降低了嵌入式Linux開發的門檻,提高了系統軟件開發的效率。
嵌入式智能移動機器人的工作流程為:傳感器模塊實時采集周圍環境信息,將此數據信息傳輸到機器人控制系統中,單片機通過數據分析獲取有效數據,從而獲知機器人與障礙物的相對位置,然后根據此位置信息產生控制信號;單片機產生PWM信號控制直流電機來控制機器人轉向,從而達到機器人自主“行走”的目的。下層的單片機與上層的ARM處理器通過串口來通信,ARM主板可將下層單片機控制板的工作數據通過無線Wi?Fi的方式傳輸到遠端的PC機。ARM主板可以不間斷地將USB攝像頭采集的清晰現場圖片發給遠端的PC控制終端。
2 系統硬件設計
硬件系統主要包括:ARM處理器、單片機、外圍接口電路、機器人底盤以及電源等,其中ARM處理器是上層的核心,51單片機是下層的核心。硬件結構框圖如圖1所示。
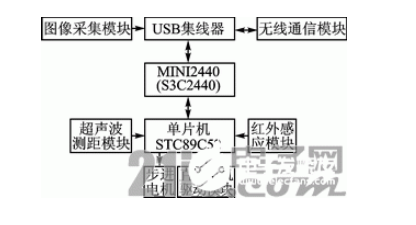
圖1 硬件結構框圖
由圖1可以看出,系統主要由以下模塊構成:圖像采集模塊、無線通信模塊、超聲波測距模塊、紅外感應模塊、MINI2440、單片機STC89C52以及直流電機驅動模塊等。下面重點介紹直流電機驅動模塊。
直流電機驅動模塊以L298N芯片為核心,該芯片具有帶載能力強的特點。直流電機驅動電路如圖2所示。驅動電路芯片的外圍電路主要是由二極管構成的電橋電路與2組電機并聯連接,以達到控制電機按照設定運轉的目的。
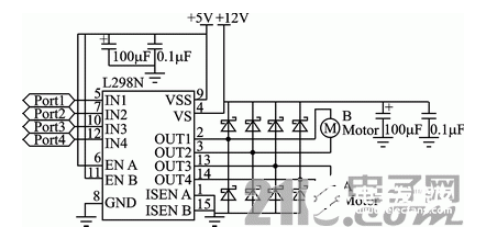
圖2 直流電機驅動電路
責編AJX
-
處理器
+關注
關注
68文章
19404瀏覽量
230959 -
機器人
+關注
關注
211文章
28632瀏覽量
208175 -
操作系統
+關注
關注
37文章
6889瀏覽量
123653
發布評論請先 登錄
相關推薦
移動機器人核心科技解碼:導航、感知與掌控力的深度剖析
自主移動機器人設計指南

思嵐科技榮獲雙年度移動機器人優質供應鏈獎
移動機器人的技術突破和未來展望

智能移動機器人系統方案指南

新松移動機器人批量進軍歐洲新能源市場

如何借助恩智浦MCX系列MCU糾錯功能,打造可靠安全的移動機器人?

智能移動機器人系統的用途和市場趨勢
移動機器人四大賦能技術及NXP解決方案,本文總結全了!
海康機器人第100000臺移動機器人下線
恩智浦MCX微控制器增強移動機器人電機控制能力
機械臂和移動機器人兩種控制系統方案對比

自主移動機器人(AMR)功能和特點

2023年國外移動機器人行業融資收購情況






 工商網監
工商網監
評論