 如何開發功能齊全的QSPI驅動
如何開發功能齊全的QSPI驅動
1. 摘要
本篇筆記主要介紹,如何開發穩定可靠,功能齊全的QSPI驅動。
2. 準備工作
1, IAR 8.32.1
2, STM32Cube_FW_H7_V1.6.0
3. QSPI簡介
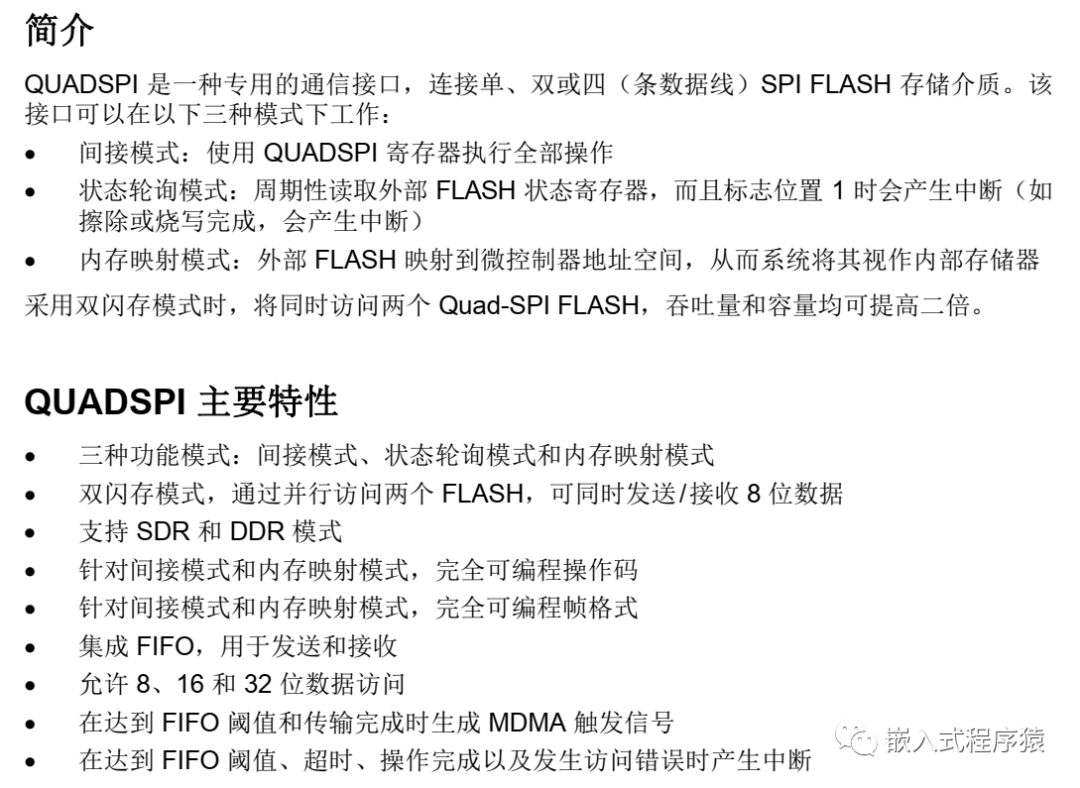
4. QSPI驅動
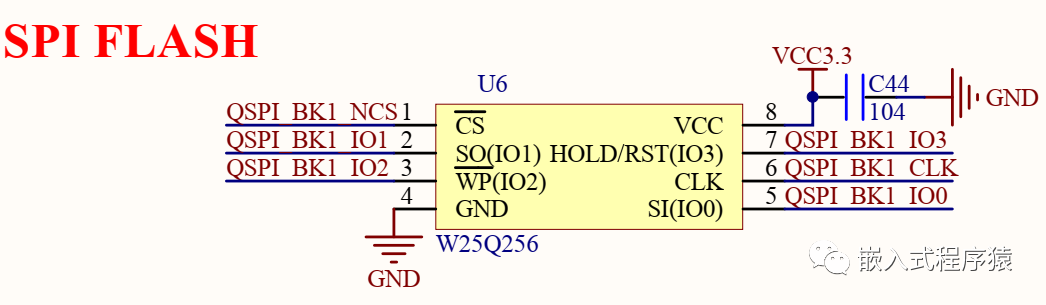
在項目的開發中,我們經常會使用外掛Flash在做一些應用,而STM32H743帶QSPI接口,可以用來外掛QSPI Flash,在之前的推送中我們以winbond華邦的W25Q256為例給大家說明了下QSPI的操作,借助ST的HAL庫例程可以快速驗證,不同型號的QSPI Flash會有一些參數和命令區別,大家應用時候要注意,例如美光和華邦的有的命令碼就不同。ST的驅動里STM32H743的評估板是以美光的MT25T_QLKT_L_01G為例。如果你使用不同的型號,請注意區分,既然是評估板,那么就只是給大家參考,在正式的項目中,還需要考慮一些其他的問題。
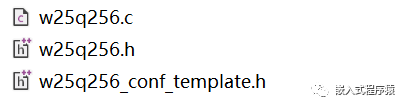
5. 驅動架構
驅動的架構可以參考STM32Cube_FW_H7中對QSPI Flash驅動架構,也可以自己做架構,盡量簡單明了,易用且穩定。對具體型號Flash的驅動可以放在一個文件下建立一個.c和.h. 如我們以華邦的W25Q系列為例,
還可以建立一個文本文檔,用來記錄驅動的一些變更,發布筆記等。
BSP層可以在BSP文件夾下建立QSPI的驅動,名字可以參考ST庫,也可以按照自己的命名規則來定,或者企業的軟件文件命名規則來定。

建立好這些文件后,接下來可以動手開發了。開發的時候可以先畫一些圖,除過正常的初始化,去初始化,外,考慮都包含那些功能,那些模式,那些命令,那些安全管理。那些中斷,是否可以用DMA操作等。還要考慮數據結構類型,配置信息,錯誤碼等。這些一定要結合數據手冊來考慮和分析。
5.1 初始化和去初始化
這部分相對比較簡單,可以參考例程,市面上的開發板,編碼風格和良莠不齊,大家盡量參考官方的資料和文檔,要考慮檢查返回值,初始化有沒有成功。跟硬件相關的管腳,時鐘等大家根據自己的應用去定,H743我一般跑400M. 官方的大部分例程也都是跑在400M.
5.2 驅動模式
從手冊可以知道分為間接模式,狀態輪詢模式,內存映射模式,那么我們的驅動就要能夠分別支持這三種模式。在stm32h743i_eval_qspi.h里面定義這些模式和其他數據類型。這些可以參考官方的定義
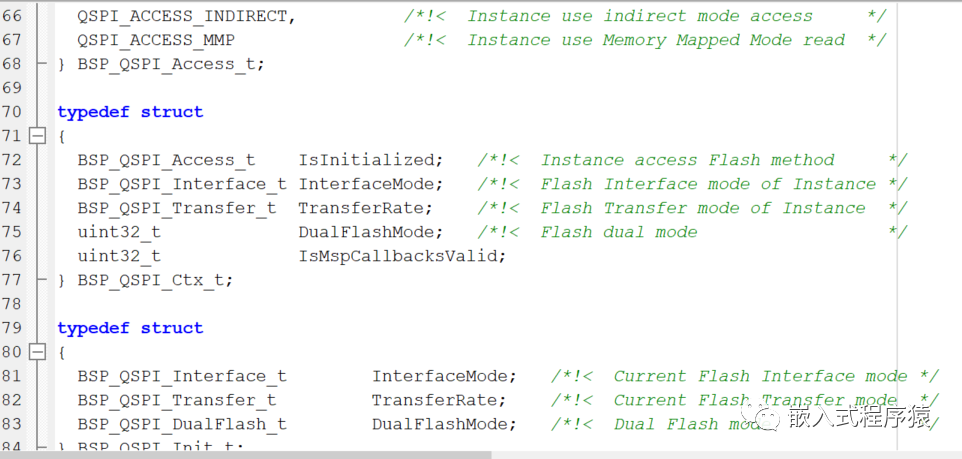
在w25q256.h中定義跟flash相關的數據類型,結構體,宏定義等。如QSPI的操作模式,這里要明白1-1-1,1-1-2,1-1-4,1-4-4等的含義,因為QSPI包含這四種,指令單線,地址單線/4線,數據單線/兩線/四線,這些在flash的數據手冊指令表里都會標出,支持那種操作,而我們在驅動中要綜合考慮這四種。

命令表的定義,這個要注意不同型號的FLASH,會稍有區別,即使同一家的不同型號的可能也有區別,如華邦256M和1G的指令就有一些個別的不同。恰好這兩款我都用過,在這里給大家提一下。由于指令比較多,這里就不一一列舉了,只截取其中一部分,具體指令表的定義可以參考flash手冊,
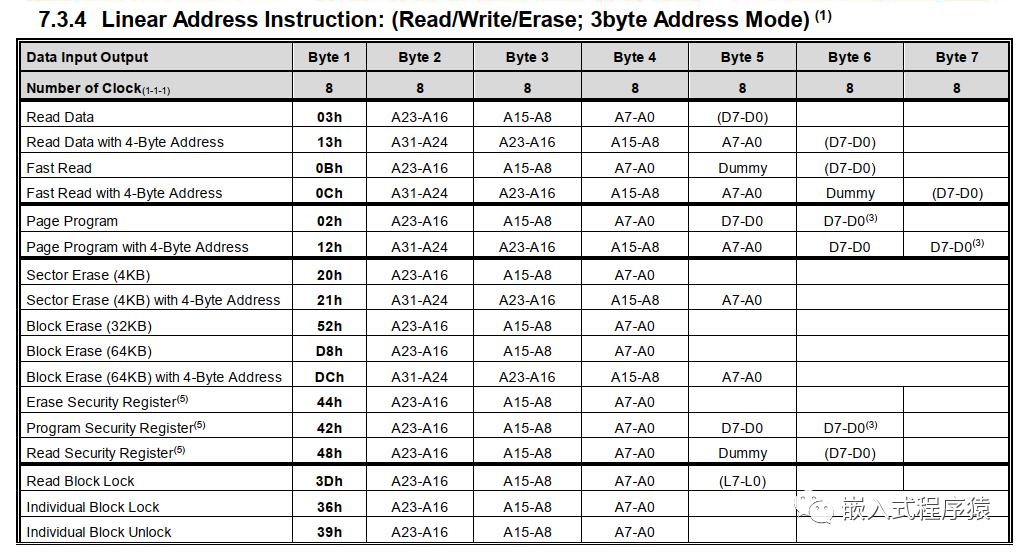
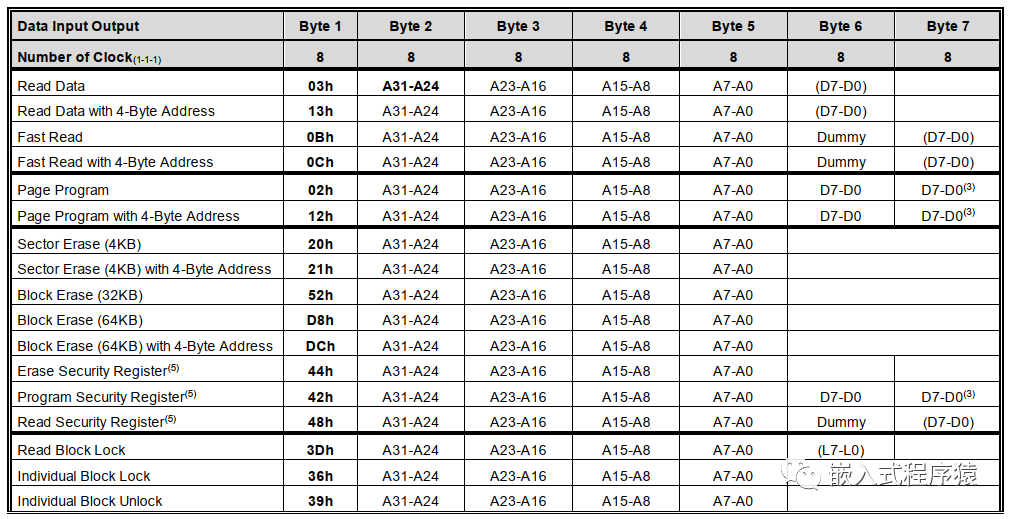
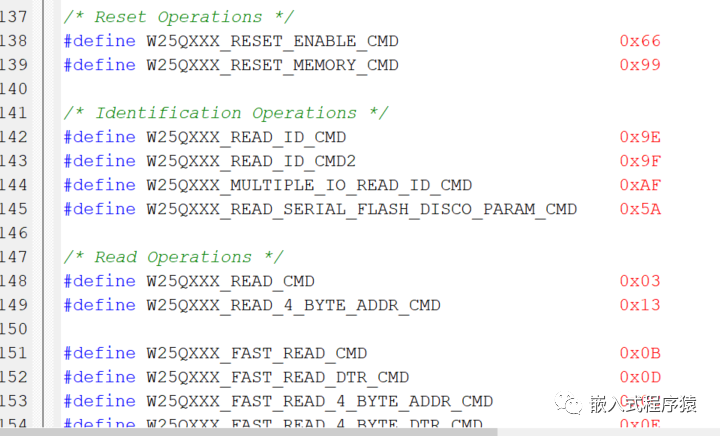
但是建議大家在做驅動的時候對所有指令做支持,這樣在用的時候就很方便,而不是用的時候發現少,在去填補。可以分別做成子函數,例如讀取ID,可以做一些校驗
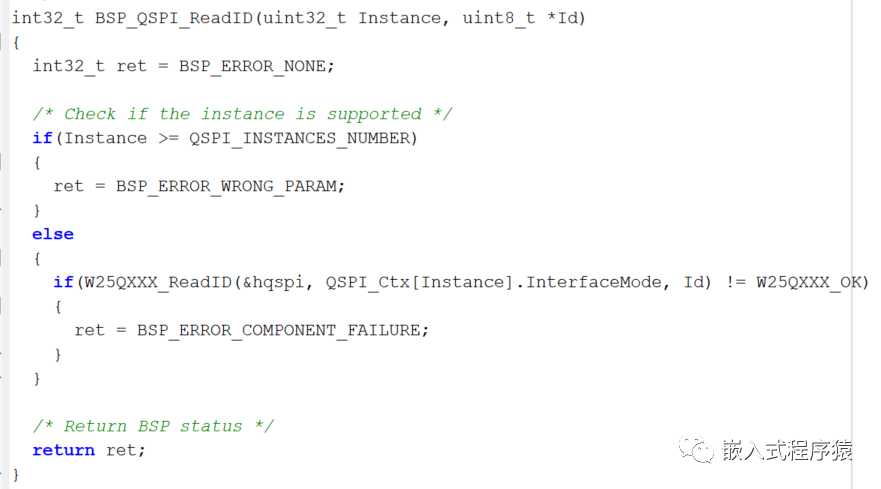
很多指令的內容官網的驅動里都沒有,需要我們自己去做。
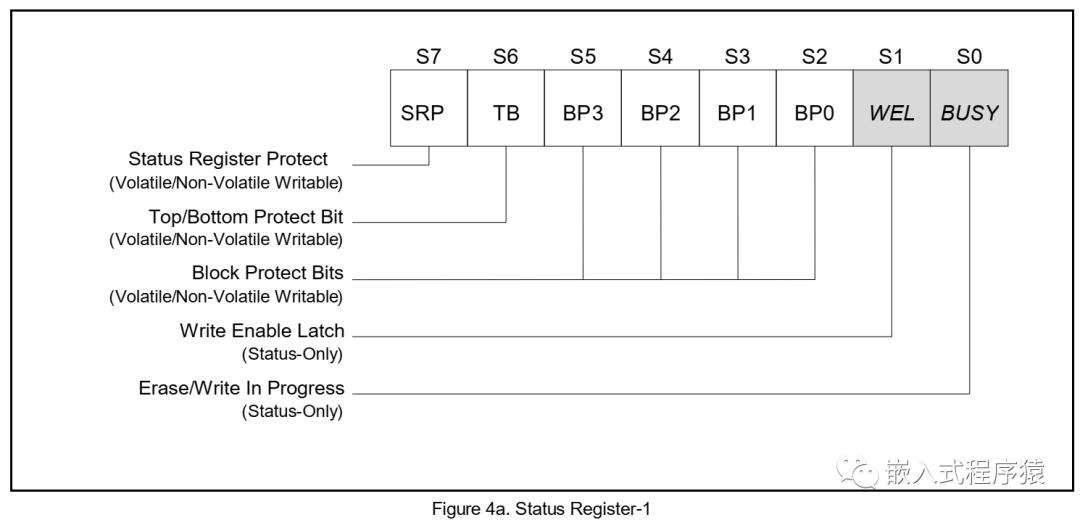
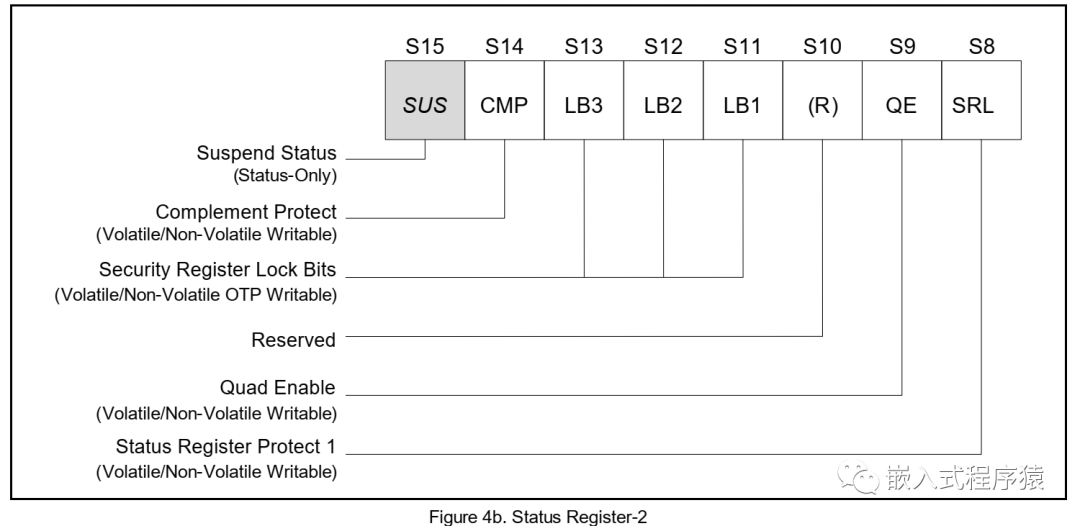
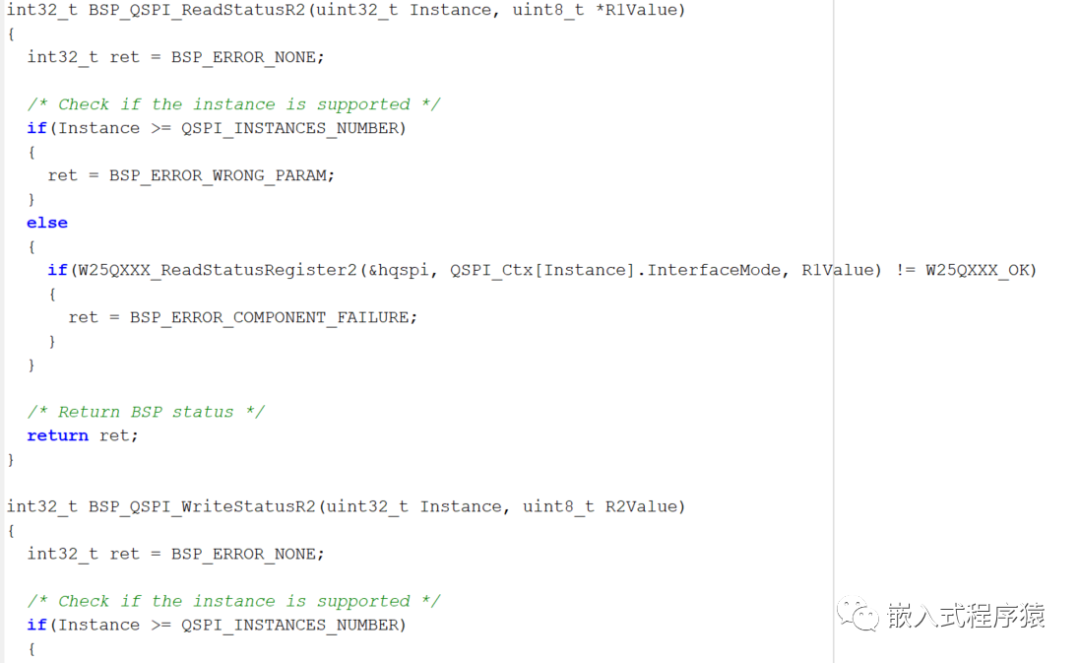
5.3 狀態寄存器讀寫
W25Q系列一般有三個狀態寄存器,用來表示一些狀態,如狀態寄存器1就可以通過讀取來判斷flash的狀態,有沒有忙,寫使能有沒有打開,以及保護位保護了那些地址,這些都要自己去實現,市面上包括官方的例程驅動里都沒有,假如你不判斷的話,如果要寫的地址被保護,是寫不進去的,還有可能出現異常,這些都可以通過讀取狀態寄存器1和2來判斷和處理。以及結合WP腳。
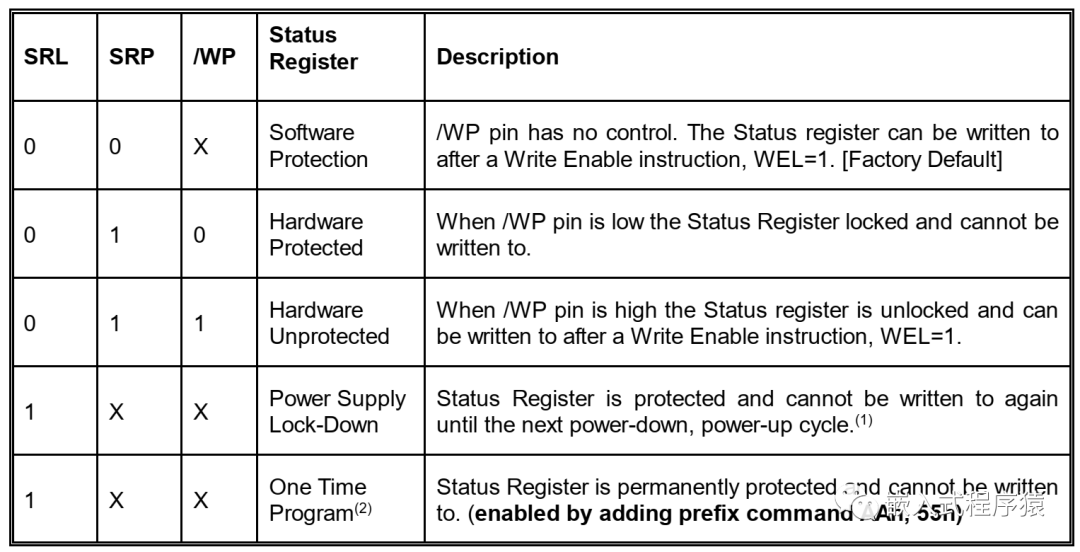
這些功能在正式的產品中我們一定要考慮,否則你的驅動就不穩定,不安全,因為工業現場各種干擾,以及其他異常情況。可能你在實驗室跑的好好的代碼,到現場就不行了
5.4 讀寫擦驅動
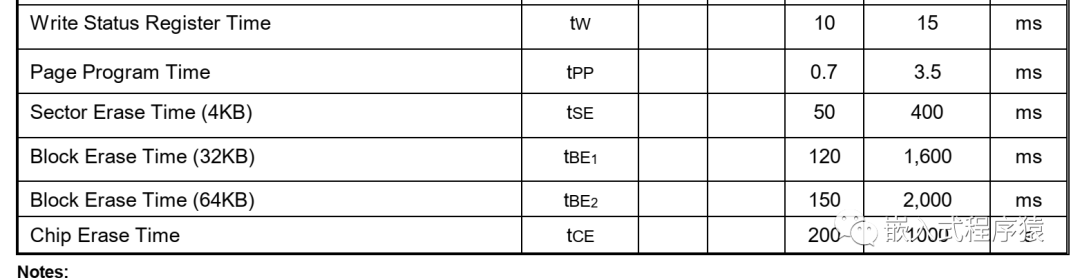
擦除操作比較耗時,所以如果你是用查詢模式的話,要不斷去查詢狀態,而不能死等,從手冊可以看除時間量級,擦除正片最大需要1000s,還是比較耗時,即使最小的擦除單元4k擦除,最壞情況也需要400ms。用中斷或者DMA方式操作的話不涉及,但DMA的話中斷需要好幾個,有命令,完成,狀態匹配,收發完成等。要熟悉這些大概時間量級。方便參考。基于不同模式的驅動我們在公眾號里都給大家介紹過。
讀寫驅動,可以參考官網的例程,但是要加一些改動,如考慮讀寫失敗怎么辦,超時退出,如果連續兩次還是失敗,怎么考慮,我們一般會考慮嘗試三次,如果第一次失敗就嘗試第二次讀取,第二次失敗,嘗試第三次,這樣可以大大加強安全性,可能99.99%的情況下一次就成功,但不排除失敗的可能性。此外還要考慮參數的保護。
5.4.1 擦除
可以按照擦除單位來綜合寫一個函數
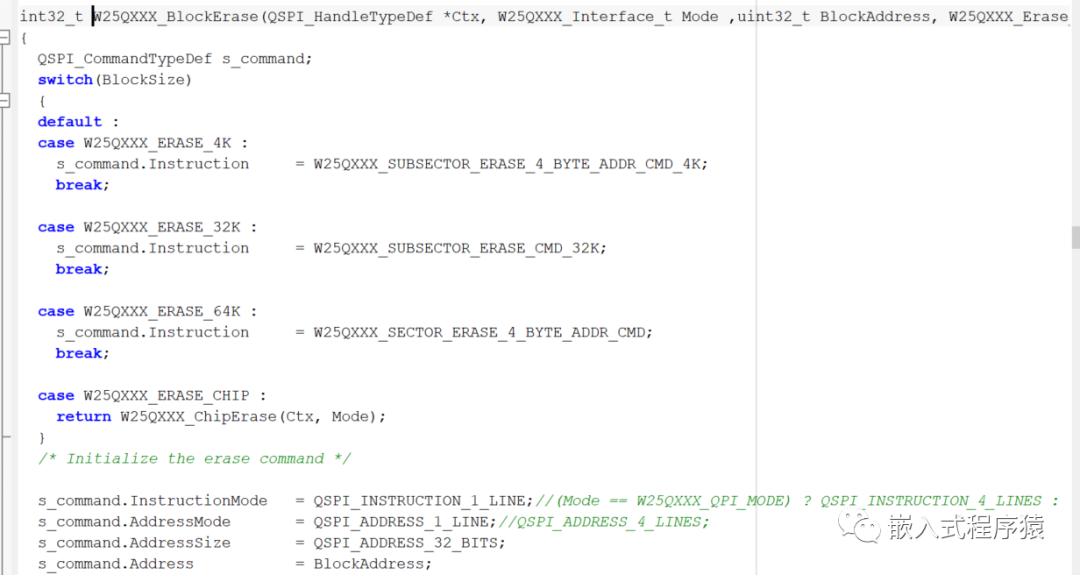
這里要注意就是W25Q256 和W25Q01J 的一些區別。如有的指令前者支持指令地址四線,而后者不支持。
5.4.2 讀操作
讀操作要考慮是single還是dual模式,分別出兩個子函數,讀的指令不同,時序也不同
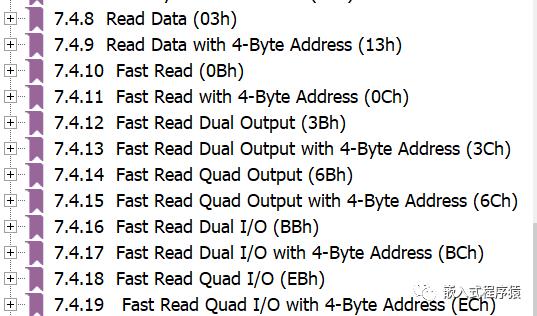
建議大家一個指令做一個子函數。如0x6C和0xEC的時序和操作模式就不同,如0X6c
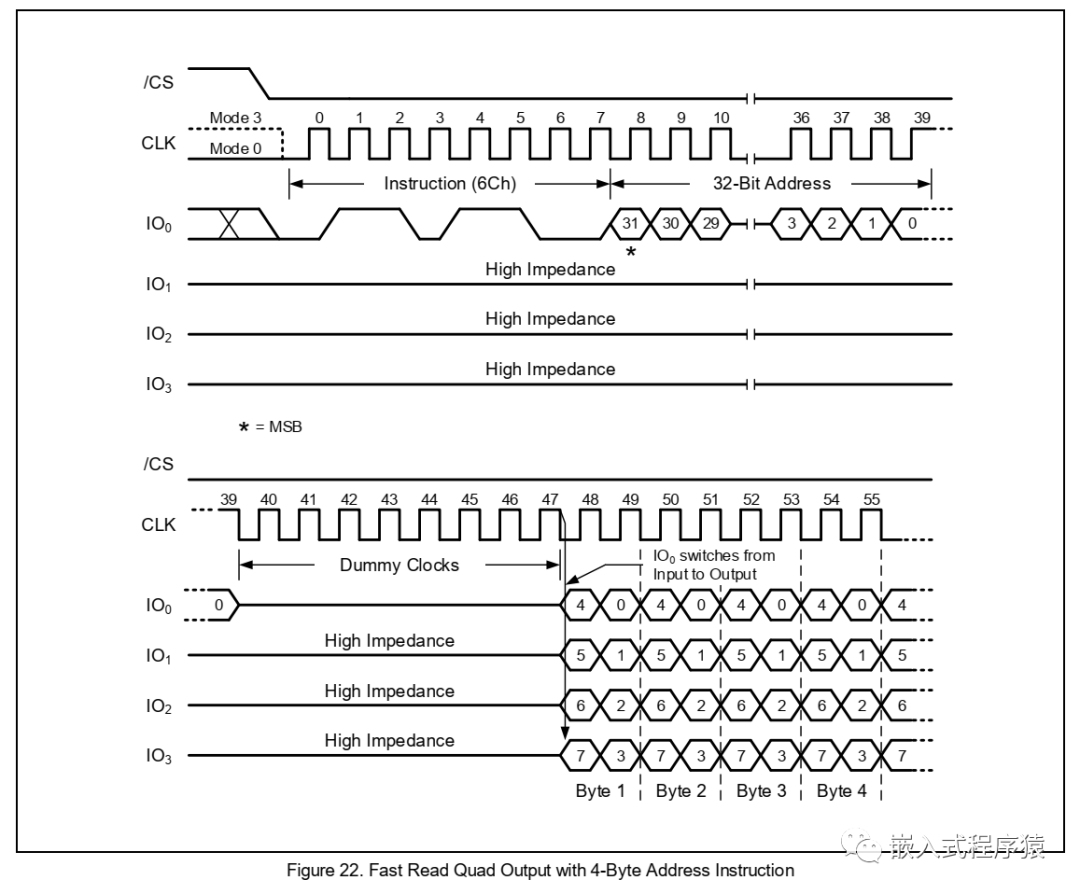
代碼實現
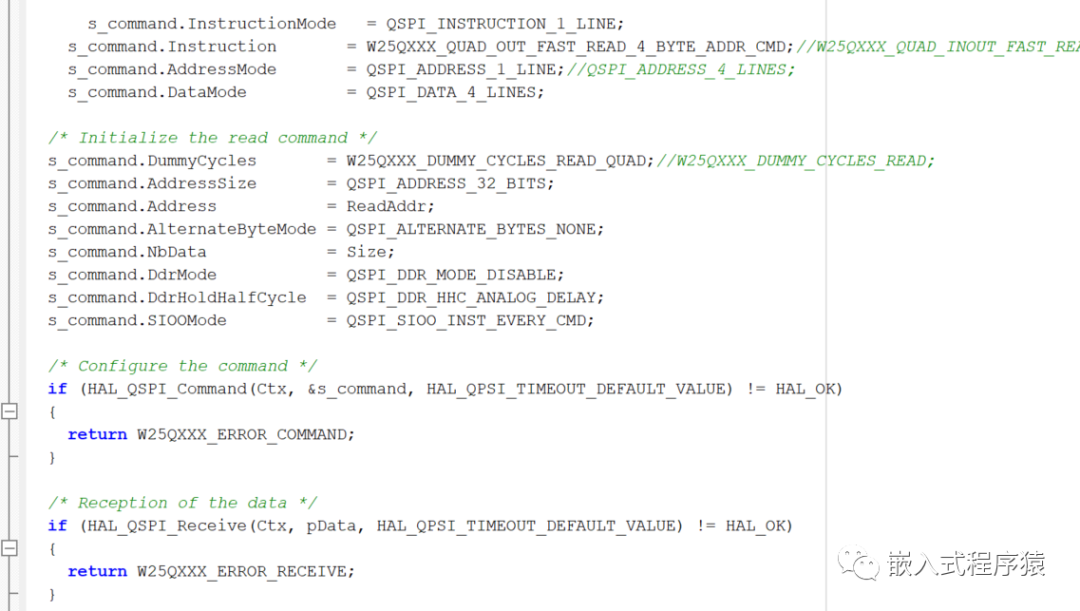
從時序圖可以看到指令單線,地址單線,數據4線即 1-1-4模式。0xEC留給大家去聯系實現。
5.4.3 寫操作
寫操縱也有幾條不同的命令

不同的時序和方式,可以寫成不同的子函數,我們以34h為例子
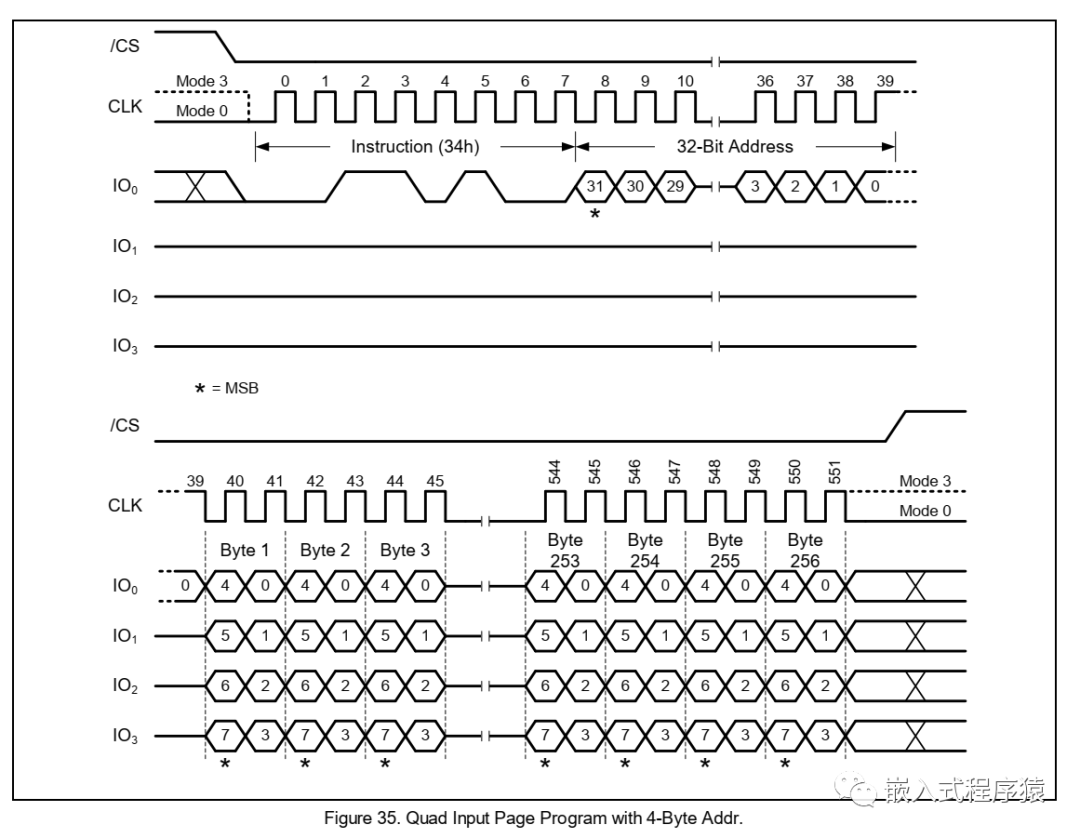
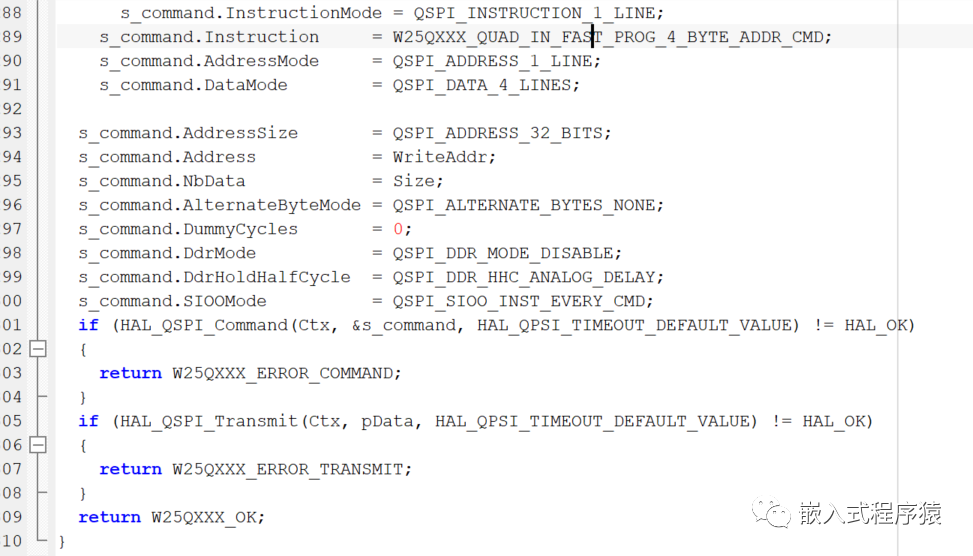
通過時序圖可以看到是指令單線,地址單線,數據四線,這樣就可以實現寫操作了。
5.5 異常
通常我們還需要去管理和處理一些異常情況,例如下面的定義,你也可以按照自己的方式,總之要對異常和錯誤做一些管理。
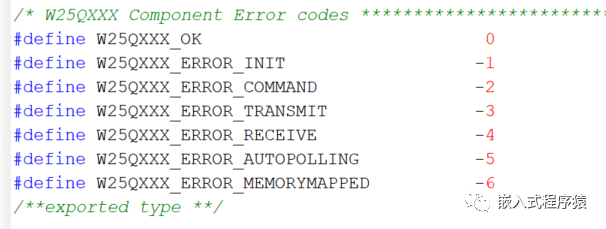
官方的例子基本上每個都有返回值,大家可以去參考,這樣使你的驅動更安全可靠。
5.6 其他
其他一些應考慮的問題,大家可以根據自己的需求和應用在添加,這里就不在贅述。
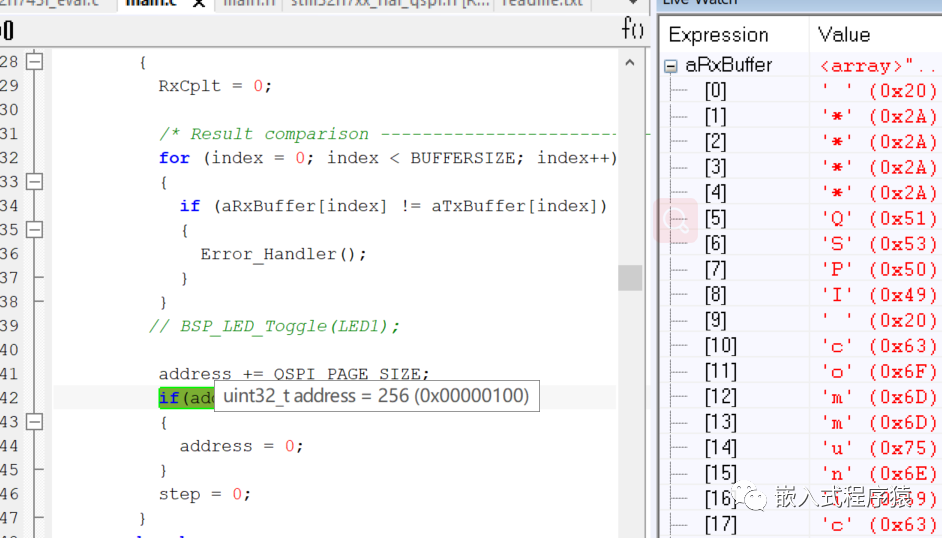
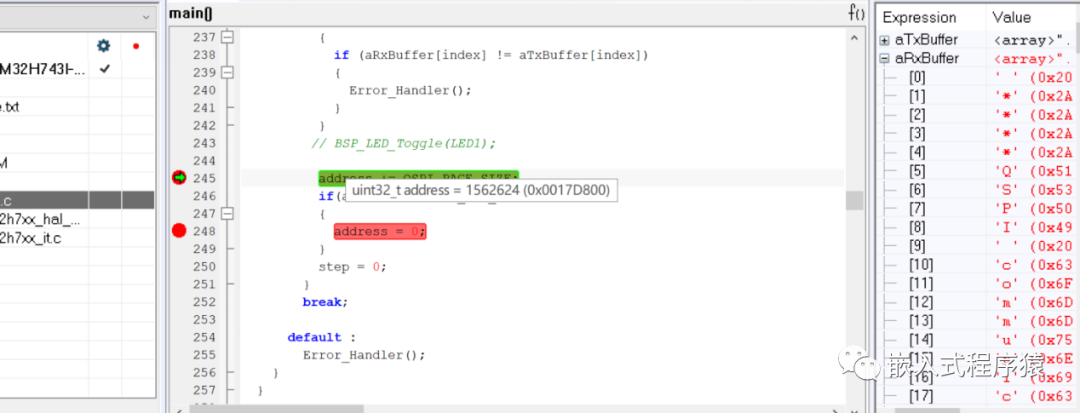
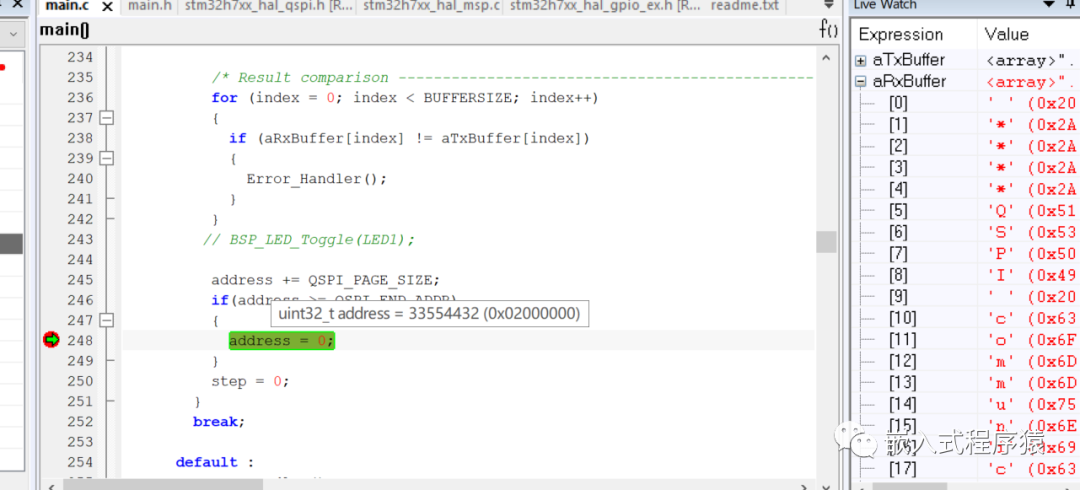
6. 測試驗證
開發完后,就可以寫一個簡答的測試程序,對自己的驅動進行測試,因為我是在freeRTOS系統下用的,所以建立一個QSPI的測試任務,去實現擦,寫,讀,比較的功能和驗證。截取幾張測試圖
7. 參考文檔
| 序號 | 文獻 |
| 1 | STM32H743RM |
| 2 | STM32Cube_FW_H7_V1.6.0 |
原文標題:如何寫好QSPI驅動
文章出處:【微信公眾號:嵌入式程序猿】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
-
驅動
+關注
關注
12文章
1840瀏覽量
85291 -
QSPI
+關注
關注
0文章
41瀏覽量
12205
原文標題:如何寫好QSPI驅動
文章出處:【微信號:InterruptISR,微信公眾號:嵌入式程序員】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
在rtt studio使用qspi dma就是進不了中斷,為什么?
STM32H743配置了QSPI驅動W25Q256JV,初始化成功,但后續都失敗了,為什么?
在mmWave SDK增加QSPI Flash驅動的示例

請問ESP32-S3如何驅動QSPI接口的LCD?
stm32l476 QSPI如何退出 Memory_Mapped MODE?
STM32 QSPI怎么退出映射模式?
無法使用STWB5MMG的QSPI IO2怎么解決?
STM32H7B0通過QSPI地址映射外部flash開始使用正常,出現QSPI功能異常是什么原因導致的?
《RT-Thread設備驅動開發指南》基礎篇--以先楫bsp的hwtimer設備為例






 工商網監
工商網監
評論