") 關(guān)于機(jī)器視覺工業(yè)鏡頭的23個(gè)相關(guān)專業(yè)術(shù)語(yǔ)詳解
關(guān)于機(jī)器視覺工業(yè)鏡頭的23個(gè)相關(guān)專業(yè)術(shù)語(yǔ)詳解
機(jī)器視覺系統(tǒng)中,鏡頭相當(dāng)于人的眼睛,其主要作用是將目標(biāo)的光學(xué)圖像聚焦在圖像傳感器(相機(jī))的光敏面陣上。視覺系統(tǒng)處理的所有圖像信息均通過鏡頭得到,鏡頭的質(zhì)量直接影響到視覺系統(tǒng)的整體性能。下面對(duì)機(jī)器視覺工業(yè)鏡頭的相關(guān)專業(yè)術(shù)語(yǔ)做以詳解。
一、失真
可分為枕形失真和桶形失真,如下圖示:
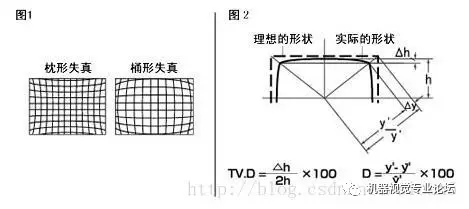
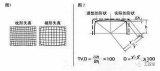
二、電視失真
實(shí)際邊長(zhǎng)的歪曲形狀與理想的形狀的百分比算出的值。
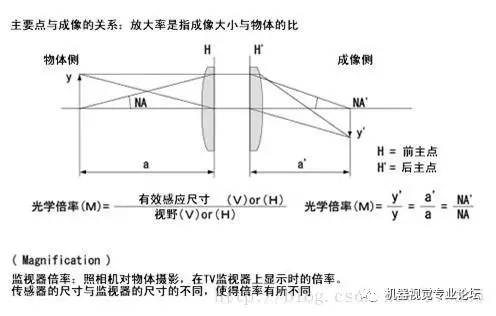
三、光學(xué)倍率
四、監(jiān)視放大
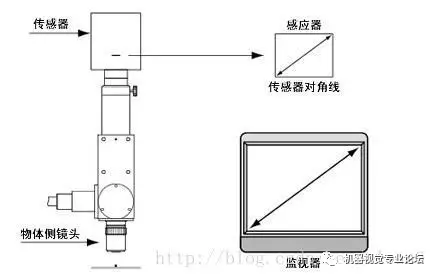

例:VS-MS1+10x鏡頭 1/2” CCD 照相機(jī), 14”監(jiān)視器上的成像

0.1mm的物體在監(jiān)視器得到的是44.45mm的成像
※有時(shí)根據(jù)TV監(jiān)視器的掃描狀態(tài),以上的簡(jiǎn)易計(jì)算將有一些變化。
五、解析度
表示了所能見到了2點(diǎn)的間隔0.61x 使用波長(zhǎng)(λ)/ NA=解析度(μ)
以上的計(jì)算方法理論上可以計(jì)算出解析度,但不包括失真。
※使用波長(zhǎng)為550nm
六、解像力
1mm中間可以看到黑白線的條數(shù)。單位(lp)/mm.
七、MTF(Modulation Transfer Function)
成像時(shí)再現(xiàn)物體表面的濃淡變化而使用的空間周波數(shù)和對(duì)比度。
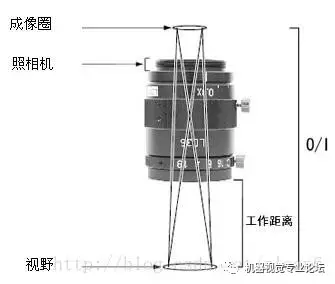
八、工作距離(Working Distance)
鏡頭的鏡筒到物體的距離
九、O/I(Object to Imager)
物像間距離即物體到像間的長(zhǎng)度。
十、成像圈
成像尺寸φ,要輸入相機(jī)感應(yīng)器尺寸。
十一、照相機(jī) Mount
C-mount: 1" diameter x 32 TPI: FB: 17.526mm
CS-mount: 1" diameter x 32 TPI: FB: 12.526mm
F-mount: FB:46.5mm
M72-Mount: FB 廠家各有不同
十二、視野 (FOV)
視野指使用照相機(jī)以后看到的物體側(cè)的范圍
照相機(jī)有效區(qū)域的縱向長(zhǎng)度(V)/光學(xué)倍率(M)=視野(V)
照相機(jī)有效區(qū)域的橫向長(zhǎng)度(H)/光學(xué)倍率(M)=視野(H)
*技術(shù)資料上的視野范圍是指由光源及有效區(qū)域的一般數(shù)值計(jì)算出來(lái)的值。
照相機(jī)有效區(qū)域的縱向長(zhǎng)度(V)or(H)=照相機(jī)一個(gè)畫素的尺寸×有効畫素?cái)?shù)(V)or(H)來(lái)計(jì)算。
十三、景深
景深是指成像后物體的距離。同樣,照相機(jī)側(cè)的范圍稱為焦點(diǎn)深度。具體的景深的值多少略有不同。
十四、焦距 (f)
f(Focal Length)光學(xué)系的后主點(diǎn)(H2)到焦點(diǎn)面的距離。
十五、FNO
鏡頭從無(wú)限遠(yuǎn)時(shí),亮度表示的數(shù)值,值越小越亮。FNO=焦距/入射孔徑或有効口徑=f/D
十六、實(shí)效F
有限距離時(shí)鏡頭的明亮度。
實(shí)效F = (1 +光學(xué)倍率) x F#
實(shí)效F = 光學(xué)倍率 / 2NA
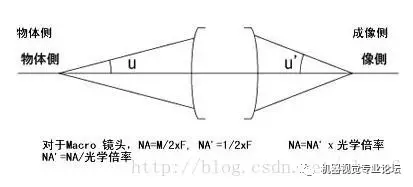
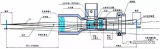
十七、NA(Numerical Aperture)
物體側(cè)的 NA = sin u x n
成像側(cè)的NA' = sin u'x n'
如下圖所示 入社角度 u, 物體側(cè)折射率n, 成像側(cè)的折射率' n'
NA = NA' x 放大率
十八、邊緣亮度
相對(duì)照度是指中央的照度與周邊的照度的百分比。
十九、遠(yuǎn)心鏡頭
主光線與鏡頭光源平行的鏡頭。有物體側(cè)的遠(yuǎn)心,成像側(cè)的遠(yuǎn)心,兩側(cè)的遠(yuǎn)心行頭等方式。
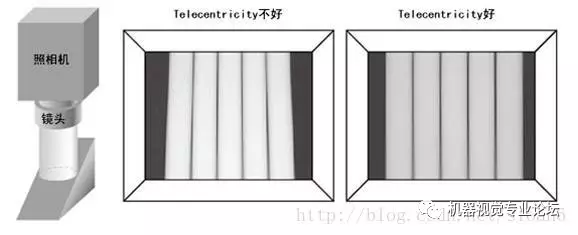
二十、遠(yuǎn)心
Telecentricity是指物體的倍率誤差。倍率誤差越小,Telecentricity越高。
Telecentricity有各種不同的用途,在鏡頭使用前,把握Telecentricity很重要。遠(yuǎn)心鏡頭的主光線與鏡頭的光軸平行,
Telecentricity不好,遠(yuǎn)心鏡頭的使用效果就不好;Telecentricity可以用下圖進(jìn)行簡(jiǎn)單的確認(rèn)。
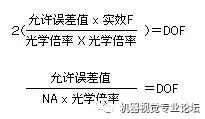
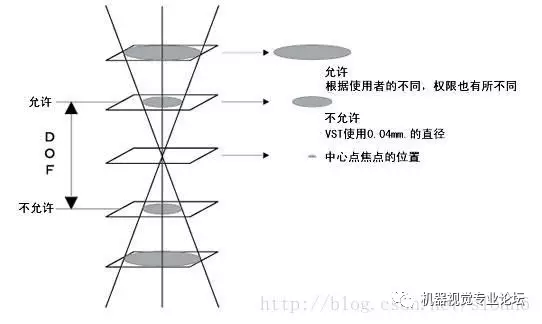
二十一、景深 (DOF)
景深(Depth of Field)可以用以下的計(jì)算式計(jì)算出來(lái):
景深 = 2 x Permissible COC x 實(shí)效F / 光學(xué)倍率2 = 允許誤差值 / (NA x 光學(xué)倍率)
(使用的是0.04mm的Permissible COC)
二十二、通風(fēng)盤及解析度
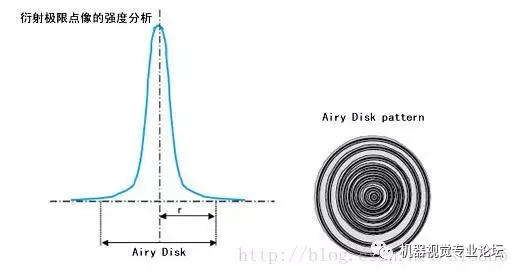
Airy Disk是指通過沒有失真的鏡頭在將光集中一點(diǎn)時(shí),實(shí)際上形成的是一個(gè)同心圓。這個(gè)同心圓就叫做Airy Disk。Airy Disk的半徑r可以通過以下的計(jì)算公式計(jì)算出來(lái)。這個(gè)值稱為解析度。r= 0.61λ/NA Airy Disk的半徑隨波長(zhǎng)改變而改變,波長(zhǎng)越長(zhǎng),光越難集中于一點(diǎn)。例:NA0.07的鏡頭 波長(zhǎng)550nm r=0.61*0.55/0.07=4.8μ
二十三、 MTF 及解析度
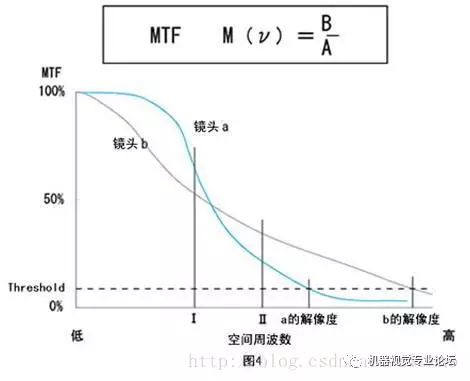
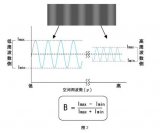
MTF(Modulation Transfer Function) 是指物體表面的濃淡變化,成像側(cè)也被再現(xiàn)出來(lái)。表示鏡頭的成像性能,成像再現(xiàn)物體的對(duì)比度的程度。測(cè)試對(duì)比性能,用的是具有特定空間周波數(shù)的黑白間隔測(cè)試。空間周波數(shù)是指1mm的距離濃淡變化的程度。
圖1所示,黑白矩陣波,黑白的對(duì)比度為100%.這個(gè)對(duì)象被鏡頭攝影后,成像的對(duì)比度的變化被定量化。基本上,不管什么鏡頭,都會(huì)出現(xiàn)對(duì)比度降低的情況。最終對(duì)比度降低至0%。,不能進(jìn)行顏色的區(qū)別。
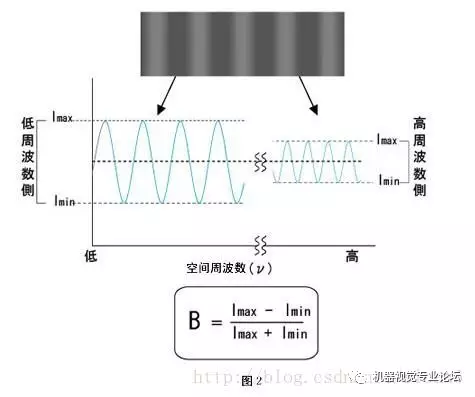
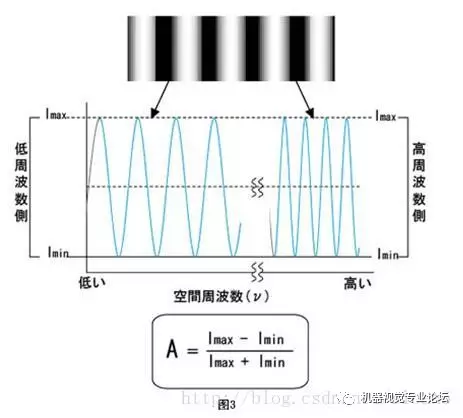
圖2、3顯示了物體側(cè)與成像側(cè)的空間周波數(shù)的變化。橫軸表示空間周波數(shù),縱軸表示亮度。物體側(cè)與成像側(cè)的對(duì)比度由A、B計(jì)算出來(lái)。MTF由A,B的比率計(jì)算出來(lái)。
解析度與MTF的關(guān)系:解析度是指2點(diǎn)之間怎樣被分離認(rèn)識(shí)的間隔。一般從解析度的值可以判斷出鏡頭的好壞,但是實(shí)際是MTF與解析度有很大的關(guān)系。圖4顯示了兩個(gè)不同鏡頭的MTF曲線。鏡頭a 解析度低但是具有高對(duì)比度。鏡頭b對(duì)比度低但是解析度高。
-
工程師
+關(guān)注
關(guān)注
59文章
1570瀏覽量
68520 -
圖像傳感器
+關(guān)注
關(guān)注
68文章
1902瀏覽量
129554 -
機(jī)器視覺
+關(guān)注
關(guān)注
162文章
4372瀏覽量
120325 -
工業(yè)鏡頭
+關(guān)注
關(guān)注
0文章
89瀏覽量
4002
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
LCD的專業(yè)術(shù)語(yǔ)
機(jī)器視覺工業(yè)鏡頭二十三名詞詳解
機(jī)器視覺工業(yè)鏡頭的二十三個(gè)相關(guān)專業(yè)術(shù)語(yǔ)詳解
傳感器技術(shù)參數(shù)的19個(gè)專業(yè)術(shù)語(yǔ)詳解
解析機(jī)器視覺工業(yè)鏡頭的相關(guān)專業(yè)術(shù)語(yǔ)
機(jī)器視覺工程師應(yīng)該了解的十六個(gè)工業(yè)鏡頭專業(yè)術(shù)語(yǔ)
物聯(lián)網(wǎng)常用專業(yè)術(shù)語(yǔ)
機(jī)器視覺工業(yè)鏡頭專業(yè)術(shù)語(yǔ)的詳解
物聯(lián)網(wǎng)相關(guān)專業(yè)術(shù)語(yǔ)解讀
計(jì)算機(jī)視覺中的專業(yè)術(shù)語(yǔ)你知道哪些?
機(jī)器視覺工業(yè)鏡頭的相關(guān)專業(yè)術(shù)語(yǔ)介紹





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論