 閉環步進模式與伺服模式的區別分析
閉環步進模式與伺服模式的區別分析
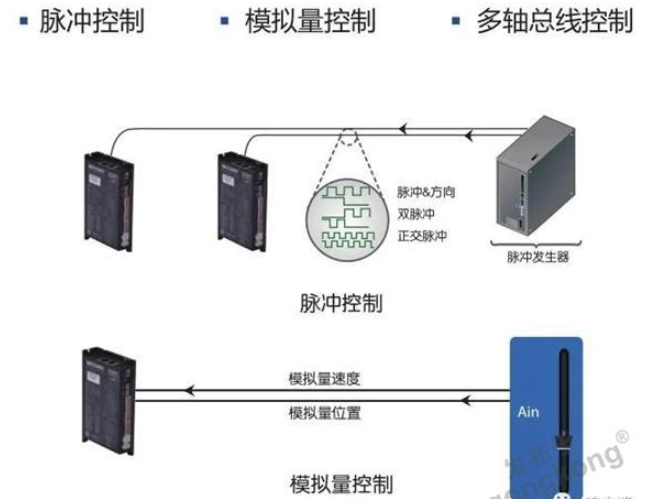
SSDC 系列是一款高性能、智能型總線步進伺服驅動系統。將伺服控制技術融入步進系統中實現閉環控制,創造出開環步進系統難以實現的優異性能。支持多種控制模式,既支持傳統的脈沖控制, 也可以通過 SCL 指令,Modbus,CANopen,eSCL指令,EtherNet/IP 或 EtherCAT 協議對驅動器和電機進行實時控制,還可以預先將運動控制程序存儲到驅動器里(Q 程序),再通過各種總線通訊指令靈活調用。
關于閉環步進模式與伺服模式的區別是什么呢?
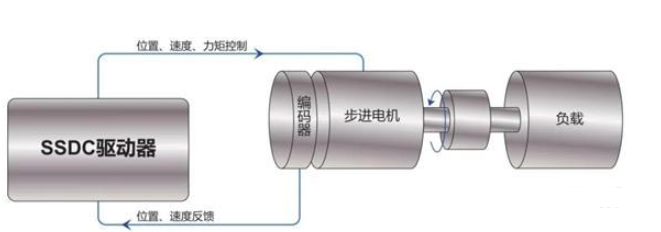
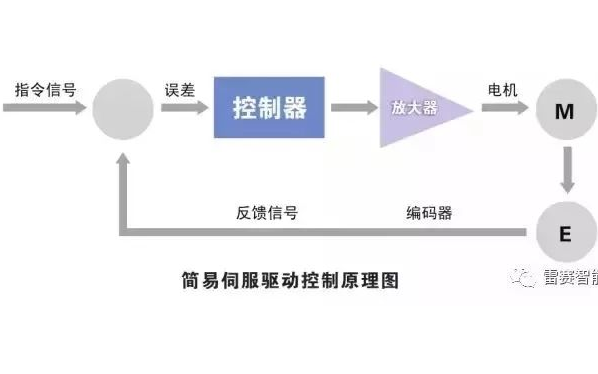
閉環伺服模式
位置、速度和電流閉環控制。精確的位置及速度控制以滿足苛刻的應用要求;根據實際負載情況實時調整電流大小;高魯棒性的伺服控制可適應寬范圍的慣性負載和摩擦負載變化。
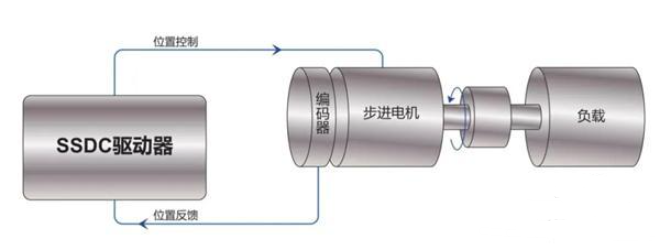
閉環步進模式
位置閉環控制。極強的易用性,無需參數整定,靜止無抖振,防堵轉。
閉環步進模式適用于一些對于抖動要求特別高的特殊應用,如:視覺系統,納米科技、半導體制造、噴墨打印機等。
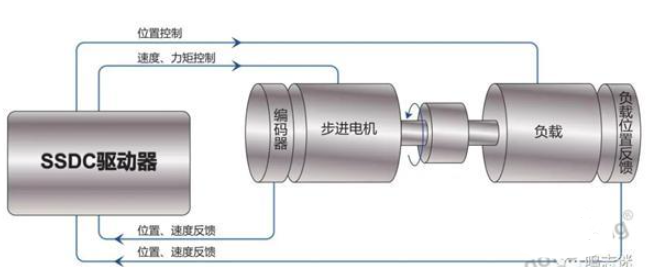
全閉環模式 —— 兩路位置反饋
支持兩路位置反饋,一路接電機內部編碼器反饋,另一路可接負載端外部位置反饋,可避免傳動機構機械誤差帶來的位置誤差,實現更精確地位置控制。負載外部位置反饋類型:光柵尺
總結:
在閉環伺服模式下運行,電機的力矩可以被100%充分利用,系統設計時無需考慮力矩冗余。
1、在大多數應用場合,電機可以最大瞬時輸出125%-150%的額定力矩,大力矩輸出在某些情況下可以簡化減速機構的復雜度。
2、25%-50%過載能力在短距離,高加減速的應用場合將系統優化得更加高效。
編輯:hfy
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
驅動器
+關注
關注
53文章
8263瀏覽量
146683 -
伺服驅動器
+關注
關注
22文章
488瀏覽量
31689 -
SSDCL
+關注
關注
0文章
2瀏覽量
6649
發布評論請先 登錄
相關推薦
以開環或閉環電流控制模式控制單極和雙極步進電機
DM330022,dsPICDEM MCSM開發板旨在以開環或閉環(電流控制)模式控制單極和雙極步進電機。硬件的設計使得無論是雙極還是單極配置的8,6或4線步進電機都不需要進行硬件更改
發表于 07-01 12:35
閉環步進電機與伺服電機對比分析
市場上常見3D打印機電機選用的是開環步進電機,出于成本、體積、控制算法實現難以程度,開環步進電機可以達到acceptable的控制效果。伺服電機是被現在的工程師們所推崇和津津樂道的,提到運動控制不談
發表于 06-27 06:38
閉環步進電機和伺服電機的區別是什么
引用論壇上的,還有一些自己的看法。下面的藍色文字引用來源于:http://www.cmiw.cn/thread-480971-1-1.html區別及優劣伺服電機是被現在的工程師們所推崇和津津樂道
發表于 06-27 06:26
閉環步進電機與伺服電機對比分析
市場上常見3D打印機電機選用的是開環步進電機,出于成本、體積、控制算法實現難以程度,開環步進電機可以達到acceptable的控制效果。伺服電機是被現在的工程師們所推崇和津津樂道的,提到運動控制不談
發表于 06-28 07:50
步進電機和伺服電機有什么區別
步進電機和伺服電機的區別辦法如下:力矩計劃:步進電機系一同般為中小力矩(通常在40Nm以下)計劃;伺服電機體系可完畢全計劃。
伺服控制器速度開環和速度閉環區別
隨著公司低壓直流伺服電機控制器的銷量增加,客戶反饋伺服控制器速度開環和速度閉環區別不是很明白,現對客戶反饋的速度閉環問題匯總整理及解決方案如下。
發表于 09-08 09:16
?2723次閱讀

伺服電機位置模式和速度模式的區別
伺服電機作為現代工業自動化領域中的核心動力裝置,其控制模式的選擇對于整個系統的性能有著至關重要的影響。在伺服電機的控制模式中,位置模式和速度
伺服系統與步進系統的區別
在工業自動化和精密控制領域,伺服系統和步進系統都是常見的控制系統,它們各自具有獨特的工作原理和應用場景。本文旨在深入探討伺服系統與步進系統之間的區別





 工商網監
工商網監
評論