 模塊化機器人SMORES-EP的并行自組裝,實現了最短的模塊運行距離
模塊化機器人SMORES-EP的并行自組裝,實現了最短的模塊運行距離
作者是賓夕法尼亞大學GRASP實驗室在讀博士生—劉超,主要從事模塊化機器人的研究,包括硬件設計、控制及運動規劃算法、決策等,在各大機器人會議和期刊發表論文多篇,包括ICRA,IROS,RSS以及RA-L,并獲得IROS最佳搜索救援機器人論文提名。
本文將分享他在ICRA 2020上的最新工作:模塊化機器人SMORES-EP的并行自組裝方法。該方法實現了最短的模塊運行距離并通過實驗驗證了方法和對接控制的可靠性。
一、引言
自重構模塊化機器人由一種或幾種形態的模塊構成,模塊之間可以通過相同的連接方式組合成不同的形態,并且可以通過連接裝置傳遞力、力矩以及交換信息。這種機器人可以像傳統的機器人一樣通過改變關節變量來調整姿態,做出不同的行為,例如抓取、操縱和移動,同時還可以對自己的形態做出很大程度上的改變,即通過改變模塊之間的連接方式實現了關節拓撲結構的改變,從而更好地適應不同的環境、行動或任務。自重構模塊化機器人一般分為三種類型:chain-type, lattice-type和mobile-type [1]。SMORES-EP(圖1)是一種混合類型機器人,可以實現上述三種類型的模塊化機器人的所有運動形式。
圖 1:一個SMORES-EP有四個自由度和四個連接器,兩個模塊之間一共有17種不同的連接方式。
每個SMORES-EP模塊有四個EP-Face連接器[2] 和四個自由度,獨特的運動學結構使得任意兩個模塊之間存在著17種連接方式,因此SMORES-EP模塊可以組成種類繁多的不同形態來適應不同的環境和任務。比如在圖2a中,7個SMORES-EP模塊組成了一個可以快速移動的小車的形態,從而能夠快速地在地面上移動完成探索、運輸等任務,但是當遇到崎嶇不平的洼地時,這種小車形態并不利于運動,因此這些模塊可以變形成蛇的形態(圖2b),從而可以通過這類地形[3]。
圖 2:(a)7個SMORES-EP模塊可以形成一個可以快速移動的小車, 從而能夠快速移動;(b)同時可以變形成一條蛇來通過崎嶇的地形。
每個SMORES-EP模塊的左輪和右輪兩個自由度賦予了其在地面上以差分驅動小車的形式自由運動的能力,這個特性使得每個模塊可以獨立于其他模塊單獨運動。配合SMORES-EP的自重構能力,多個模塊可以表現出一定的群體行為。類似于自然界中生物的群體智慧行為,比如一只小螞蟻的行為能力極其有限,但是一群螞蟻卻能夠表現出驚人的、極大超出每個個體能力極限的行為。
一個SMORES-EP模塊雖然有4個自由度,但是運動能力有限,能適應的環境和任務場景也因此收到了很大限制,例如一個模塊是無法通過一道較寬的溝壑的,但是三個模塊可以組成一個蛇形從而通過這道溝壑。多個分散的模塊協同工作、自主拼裝成一個復雜形態的能力可以極大地增強這類模塊化機器人的適應能力,使其完成任一單獨的模塊均無法完成的任務,這個運動規劃過程稱之為self-assembly planning。
二、模塊化機器人并行自組裝
1、機器人形態模型
一個模塊化機器人形態(拓撲結構)可以用一個無向圖G =(V,E)來表示,其中V是G的頂點的集合,代表著所有的模塊,E是G的所有邊的集合,每條邊包含著表示模塊間的連接方式的必要信息,這些信息取決于模塊化機器人的設計[4]。任意兩個頂點間存在唯一一條路徑的無向圖是樹,一個樹G=(V,E)可以相對于某個頂點轉換成有根樹,我們選取圖的中心[5]為根節點模塊。我們在[4]中提出了一個線性時間復雜度的算法來找到一個樹狀拓撲結構的模塊化機器人的中心。例如,圖3a是一個由三個 SMORES-EP組成的簡單形態,對應的圖G=(V,E)表示在圖3b 中,其中根模塊是2號模塊。
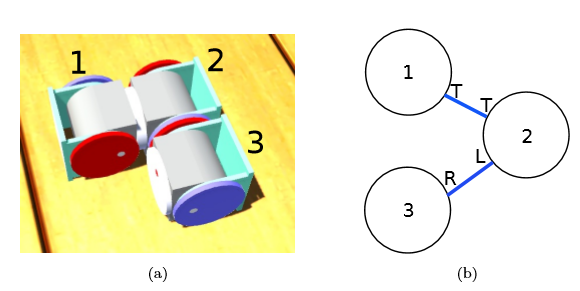
圖 3:(a)三個SMORES-EP組成的一個形態和(b)對應的圖G=(V,E)。
2、并行自組裝
我們這里提出一種可以并行的自組裝方法。已知的條件是每個模塊當前的位置(圖4a)以及期望的最終形態(圖4b)。首先要解決的是最優地找到每個模塊對應到最終形態中的角色。所有SMORES-EP模塊都是一模一樣的,因此并沒有固定的角色分配方案,但是好的分配方案可以使組裝的過程更快、更容易。我們這里期望所有模塊需要運行的距離能夠最短。為了達到這個目的,首先將目標形態展開到地面上、計算根模塊,基于根模塊,可以快速計算出其余每個模塊的2D位姿。基于現實中每個模塊當前的位置,我們可以通過解決一個任務分配(task assignment)的問題來找到最優的分配方案。
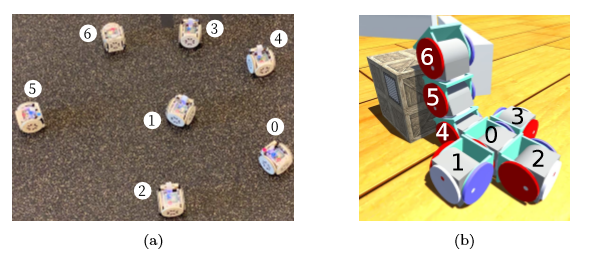
圖 4:(a)七個模塊的初始狀態;(b)期望變成的形態。
當每個模塊都被最優地分配了相應的角色之后,自組裝便可以開始。從根模塊開始,處于同一深度的模塊可以同時開始組裝的過程,直到所有處于葉子節點的模塊完成最終的組裝動作。一個組裝動作可以簡單表示成一個元祖(mi, ci,mj,cj),代表著將模塊mi的連接器ci與模塊mj的連接器cj相連接。對于模塊化機器人,這個對接的過程往往費時費力,因此我們提出一種可靠的方法來保證對接的成功。就像把大象放進冰箱一樣,我們把對接的過程分成三步:第一步是導航,即控制SMORES-EP 模塊快速穩定地到達一個接近目的地的地方(圖5a),在這個過程中需要對多個模塊進行路徑規劃; 第二步是調整姿態準備對接(圖5b); 第三步是靠近對應模塊完成對接(圖5c)。詳細的控制器設計及其表現可以查看我們的論文。
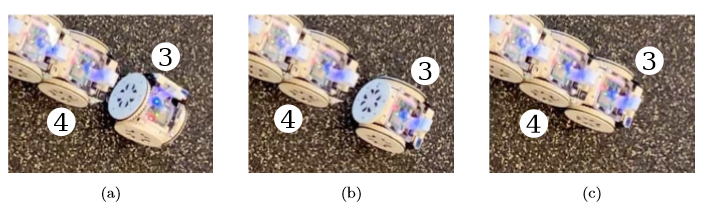
圖 5:執行組裝動作(3,T,4,B)。(a)控制 3 號模塊導航至一個接近目標的 位置,(b)調整姿態準備對接,(c)靠近 4 號模塊完成對接。
三、 實驗及結論
在論文和視頻中我們演示了三個實驗:
1. 7個分散的模塊自組裝成一個帶有機械臂的小車從而可以接觸高臺(圖4b);
2. 9個分散的模塊自組裝成一個可以任意方向移動的小車(圖6a);
3. 7個分散的模塊自組裝成一個差分驅動四輪車從而可以推動重物(圖6b);
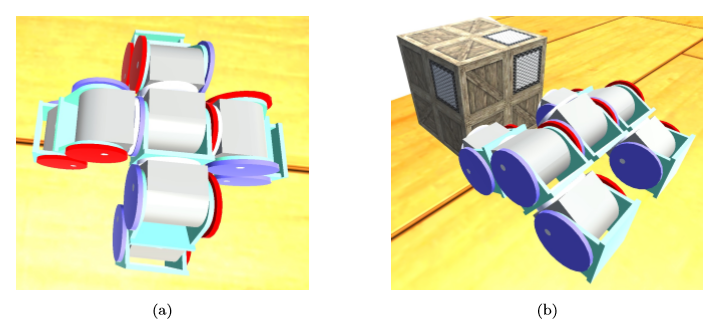
圖 6:(a)9 個分散的模塊自組裝成一個可以任意方向移動的小車;(b)7 個分散的模塊自組裝成一個差分驅動四輪車從而可以推動重物。
在這三個實驗中我們展示了并行自組裝的全過程,驗證了我們的方法和對接控制的可靠性。在第三個實驗中,特殊的地方是需要helping module的幫助來完成一些組裝的動作。單個模塊依賴左右輪進行運動,因此在對接的時候無法直接控制這兩個連接器的角度,需要一個helping module輔助抬起模塊以完成連接器角度的調整。關于這個工作更多的內容可以在ModLab網站的post查看,也可以在SMORES-EP項目主頁上查看更多關于SMORES-EP的研究工作。
參考文獻
[1] M. Yim, W. Shen, B. Salemi, D. Rus, M. Moll, H. Lipson, E. Klavins, and G.S.Chirikjian,“Modular self-reconfigurable robot systems[grand challenges of robotics],” IEEE Robotics Automation Magazine, vol. 14, no. 1, pp. 43–52, 2007.
[2] T. Tosun, J. Davey, C. Liu, and M. Yim, “Design and characterization of the ep-face connector,” in 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016, pp. 45–51.
[3] C. Liu, M. Whitzer, and M. Yim, “A distributed reconfiguration planning algorithm for modular robots,” IEEE Robotics and Automation Letters, vol. 4, no. 4, pp. 4231–4238, 2019.
[4] C. Liu and M. Yim, “Configuration recognition with distributed information for modular robots,” in IFRR International Symposium on Robotics Research, Puerto Varas, Chile, 2017.
[5] G.L.McColm,“On the structure of random unlabelled acyclic graphs,” Discrete Math., vol. 277, no. 1, pp. 147–170, 2004.
責任編輯:xj
-
機器人
+關注
關注
211文章
28576瀏覽量
207766 -
模塊化機器人
+關注
關注
0文章
5瀏覽量
6481
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
《具身智能機器人系統》第10-13章閱讀心得之具身智能機器人計算挑戰
開源項目!能夠精確地行走、跳舞和執行復雜動作的機器人—Tillu
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
模塊化示波器的技術原理和應用
模塊化設計,舵機激發無限可能!
模塊化儀器的技術原理和應用場景
“0元購”智元靈犀X1機器人,軟硬件全套圖紙和代碼全公開!資料免費下載!
模塊化插座接線方法有哪些
開源項目!用ESP32做一個可愛的無用機器人
開源項目!用ESP32做一個可愛的無用機器人
ABB擴大模塊化工業機器人產品線,打造高靈活定制化生產

機房升級必備神器:模塊化精密空調的五大超能力!





 工商網監
工商網監
評論