") MEMS運動傳感器原理
MEMS運動傳感器原理
人體運動分析是指通過一定的方法對人的運動進行捕捉和記錄,用于定量描述、分析和評價人的運動的一門學科。人體運動分析主要是使用運動捕捉系統(tǒng)實現(xiàn)運動跟蹤和行為識別兩大主要任務,其中慣性式運動捕捉系統(tǒng)主要采用MEMS傳感器。
MEMS傳感器作為一種采用微電子和微機械加工技術(shù)制造出來的新型傳感器,具有微型化、集成化、智能化、成本低、效能高、可大批量生產(chǎn)等特點,在慣性式運動捕捉技術(shù)中發(fā)揮了重要作用。
慣性式運動捕捉系統(tǒng)中測量人體運動的慣性傳感器,也稱之為運動傳感器,捕捉和識別身體不同部位的運動狀態(tài),可以布置在頭部、上肢、下肢、手部等多個部位。慣性傳感器主要包括加速度計、陀螺儀、磁力計,在實際應用中,采集的傳感數(shù)據(jù)需經(jīng)過校準、誤差檢測和補償、數(shù)據(jù)融合后,用于分析和跟蹤人體運動。
運動傳感器原理
1.MEMS加速度計原理
MEMS加速度計分為三種:壓電式、容感式、熱感式。壓電式MEMS加速度計運用的是壓電效應,在其內(nèi)部有一個剛體支撐的質(zhì)量塊,有運動的情況下質(zhì)量塊會產(chǎn)生壓力,剛體產(chǎn)生應變,把加速度轉(zhuǎn)變成電信號輸出。容感式MEMS加速度計內(nèi)部也存在一個質(zhì)量塊,從單個單元來看,它是標準的平板電容器。加速度的變化帶動活動質(zhì)量塊的移動從而改變平板電容兩極的間距和正對面積,通過測量電容變化量來計算加速度。熱感式MEMS加速度計內(nèi)部沒有任何質(zhì)量塊,它的中央有一個加熱體,周邊是溫度傳感器,里面是密閉的氣腔,工作時在加熱體的作用下,氣體在內(nèi)部形成一個熱氣團,熱氣團的比重和周圍的冷氣是有差異的,通過慣性熱氣團的移動形成的熱場變化讓感應器感應到加速度值。
由于壓電式MEMS加速度計內(nèi)部有剛體支撐的存在,通常情況下,壓電式MEMS加速度計只能感應到“動態(tài)”加速度,而不能感應到“靜態(tài)”加速度,也就是我們所說的重力加速度。而容感式和熱感式既能感應“動態(tài)”加速度,又能感應“靜態(tài)”加速度。
2.MEMS陀螺儀原理
MEMS陀螺儀利用科里奧利力——旋轉(zhuǎn)物體在有徑向運動時所受到的切向力。實際的
MEMS陀螺儀的設(shè)計如下圖。如果物體在圓盤上沒有徑向運動,科里奧利力就不會產(chǎn)生。因此,在MEMS陀螺儀的設(shè)計上,這個物體被驅(qū)動,不停地來回做徑向運動或者震蕩,與此對應的科里奧利力就是不停地在橫向來回變化,并有可能使物體在橫向作微小震蕩,相位正好與驅(qū)動力差90度。
MEMS陀螺儀通常有兩個方向的可移動電容板。徑向的電容板加震蕩電壓迫使物體作
徑向運動,橫向的電容板測量由于橫向科里奧利運動帶來的電容變化。因為科里奧利力正比于角速度,所以由電容的變化可以計算出角速度。
3.MEMS磁力計工作原理
MEMS磁力計就是通過測量磁場強度和方向來定位設(shè)備的方位的傳感器。磁傳感器就
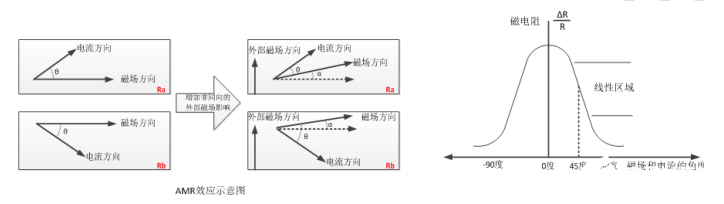
是感應環(huán)境磁場的變化,并把它轉(zhuǎn)換為電信號,從而測量出對應物理量的器件,主要應用在電子羅盤、磁場感應器、位置感應器等方案中。磁場的測量可以利用霍爾效應、磁阻效應、電磁感應效應等原理。根據(jù)不同的原理可以制成多種MEMS磁力計。磁傳感器廣泛采用AMR材料(AnisotropicMagneto-Resistance),如鐵、鈷、鎳及其合金等,指當外部磁場與磁體內(nèi)建磁場方向成零度角時,電阻是不會隨著外加磁場強度變化而發(fā)生改變的,但當外部磁場與磁體的內(nèi)建磁場有一定角度的時候,磁體內(nèi)部磁化矢量會偏移,從而磁場方向和電流方向也會隨之變化,導致電阻阻值也將發(fā)生變化。
從下圖中可知,當電流方向和磁體內(nèi)磁化方向成45度角度時,外部磁場給磁阻所引起
的電阻變化呈現(xiàn)出的是線性關(guān)系,所以磁傳感器在沒有外部磁力影響時候的初始角度設(shè)定為45度,利用這個線性關(guān)系再通過惠斯通電橋即可得到外界磁場值。
人體運動系統(tǒng)分類應用
人體運動系統(tǒng)的應用范圍較廣,根據(jù)其研究分析的主體,主要劃分為全身運動分析系統(tǒng)
和專用運動分析系統(tǒng)。
全身運動分析系統(tǒng)是指在人體全身各主要部位的關(guān)鍵點布置運動傳感器,捕捉分析人體
各部位姿態(tài)和位置信息。常見的全身運動分析系統(tǒng)有荷蘭XSens科技公司的XSensMVN系統(tǒng),英國Animazoo捕捉系統(tǒng)、北京孚心科技的FOHEART Leo動作捕捉套裝。
1)XSensMVN:
XSensMVN套裝是XSens的一個重要產(chǎn)品,MVN慣性動作捕捉系統(tǒng),如下圖所示,以獨特的微型慣性運動傳輸傳感器(MTx)和無線Xbus 系統(tǒng)為基礎(chǔ),結(jié)合了符合生物力學設(shè)計的高效傳感器等Xsens最新科技,能夠?qū)崟r捕捉人體6自由度的慣性運動,同時將數(shù)據(jù)通過無線網(wǎng)絡傳輸?shù)接嬎銠C或筆記本電腦中,實時記錄和查看動態(tài)捕捉效果。另外,該系統(tǒng)最獨特之處在于無需外部照相機和發(fā)射器等裝置,避免了多余的數(shù)據(jù)傳輸線或電源線對使用者的行動限制。MVN套裝,己經(jīng)進入了電影制作和電子游戲產(chǎn)業(yè),可以不受環(huán)境光線與空間距離的限制,純凈的動作捕捉數(shù)據(jù)不需要進行后處理即可錄制完成,非常適用于各種實時的表演應用。XSens 的產(chǎn)品主要針對多個應用領(lǐng)域,如,動畫、醫(yī)學、體育科學等。
2)Animazoo:
Animazoo是一個面向開發(fā)人員的、動畫驅(qū)動的動作捕捉的軟硬件系統(tǒng)。它針對不同的應用領(lǐng)域提供定制的運動捕捉解決方案,價格和性能也因應用領(lǐng)域和方式而各不相同。AnimazooIGS-190-M物理慣性動作捕捉系統(tǒng)安裝簡單,小巧易存,且適合于戶外應用環(huán)境。除了這些與其它慣性系統(tǒng)類似的特點外,AnimazooIGS-190-M與
其它物理慣性動作捕捉系統(tǒng)的最大區(qū)別在于其能夠與硬件同步,可以對模特髖部進行跟蹤并提供整體定位數(shù)據(jù)(6自由度),這些功能都是普通慣性系統(tǒng)所缺少的。Animazoo公司開發(fā)的超聲波跟蹤系統(tǒng)為聲納三角測量裝置,與“AnimazooIGS-190-M物理慣性動作捕捉”連接后,可將AnimazooIGS-190-M升級為“IGS-190-H物理慣性動作捕捉”。聲納裝置發(fā)射的定位數(shù)據(jù)在電視直播、多演員表演中,尤其是可作為指南,對后期制作的光學性能數(shù)據(jù)進行清潔,消除模糊不清有著重要作用。
3)FOHEARTLeo動作捕捉套裝:
FOHEARTLeo是北京孚心科技的一款產(chǎn)品,包含33個節(jié)點覆蓋全身,其中手部和手臂可以連接hub單獨進行使用,用于捕捉手臂及手指的動作數(shù)據(jù),如下圖所示。其中,手部節(jié)點尺寸約12mm,10個節(jié)點可全方位覆蓋手部的活動節(jié)點,捕捉較為精準。
專用運動分析系統(tǒng)通常只包含幾個運動傳感器,安裝在人體特定的某些身體部位,如頭
部、手臂、下肢等,監(jiān)測相應的運動特征和狀態(tài),可以將其主要劃分為上半身和下半身的運動分析。
1)上半身運動分析:
上半身運動分析主要是針對使用者的頭部,雙臂,手部等部位進行運動捕捉和監(jiān)測。通過運動傳感器追蹤頭部運動,獲取虛擬現(xiàn)實(AR/VR)和遠程操作那個中所需的頭部信息;將多個慣性傳感器安置在雙臂,捕捉雙臂運動姿態(tài),可用于運動訓練中的矯正和監(jiān)測;數(shù)據(jù)手套可用于檢測手指彎曲,利用磁定位傳感器來精確地定位出手在三維空間中的位置,可進行虛擬場景中物體的抓取、移動、旋轉(zhuǎn)等動作,為虛擬現(xiàn)實系統(tǒng)提供了一種全新的交互手段;腰部的運動傳感器可以實現(xiàn)對人的重心的監(jiān)測,可應用于跌倒檢測。
2)下半身運動分析:
下半身運動分析主要是針對使用者的骨盆、大腿、小腿和腳部等部位進行運動捕捉和分析。將運動傳感器綁在小腿上,利用運動算法可以估算行走速度;足部的運動傳感器可以實現(xiàn)對行走過程中的步態(tài)參數(shù)進行監(jiān)測。除了單一種類傳感器的運用,慣性傳感器可結(jié)合壓力傳感器、超聲波傳感器、反饋裝置等,測量步長、抬腳高度、步寬、足部軌跡等,并獲取相應的反饋,用于步態(tài)分析。
運動傳感器數(shù)據(jù)處理和融合
對慣性傳感器的應用包括初始校準、數(shù)據(jù)處理和融合等。MEMS加速度計可以測量載
體在三軸方向上的加速度,并可計算相應的速度,其在靜態(tài)時測量精度較高,在動態(tài)運動中存在線性加速度的干擾。MEMS陀螺儀可測量高速轉(zhuǎn)動下的轉(zhuǎn)動角速度,進一步運算可得角度信息,其擁有良好的動態(tài)響應性,但是隨著時間的累積,會產(chǎn)生累積誤差,發(fā)生漂移。三軸磁力計通過感應當?shù)氐拇艌鐾坑嬎爿d體方位姿態(tài),所在地球磁場恒定不變時,磁力計在靜態(tài)下有良好的測量特性,不易隨時間發(fā)生漂移,但是室內(nèi)環(huán)境中磁力計容易受到鐵磁擾動。因此,為獲得人體位姿估計的結(jié)果,須解決兩個關(guān)鍵問題:1)對傳感器的誤差進行補償和校正;2)采用合適的算法融合各傳感器數(shù)據(jù)。
1.傳感器誤差
從加速度計、陀螺儀、磁力計的角度出發(fā),傳感器誤差的來源主要是隨機漂移、線性加
速度干擾和磁力計擾動。
(1)隨機漂移
隨機漂移主要來源于加速度計和陀螺儀,可以將隨機漂移進行相應的建模,使用卡爾曼
濾波器等進行在線估計,從而實時補償該隨機漂移。
(2)線性加速度
在跟蹤人體運動時,加速度計通常處于動態(tài)環(huán)境中,當人體運動的加速度相對于重力加
速度無法忽略時,此時根據(jù)加速度計測量值計算出的俯仰角和橫滾角會與真實值存在較大的誤差,如果不對線性加速度計加以補償,就會引起動態(tài)精度的下降。為解決該類問題,可以將線性加速度擴張成系統(tǒng)的狀態(tài)變量,通過各種濾波方法進行估計,一方面可以對線性加速度分量和重力加速度分量進行處理,另一方面根據(jù)線性加速度的大小自適應調(diào)整加速度計量測噪聲方差的大小。
(3)磁力計擾動
當周圍存在磁場干擾時,特別是在室內(nèi)環(huán)境中磁力計的測量精度會受到很大的影響。磁
場干擾可分為硬鐵干擾和軟鐵干擾。硬鐵干擾產(chǎn)生于永久磁鐵,這些干擾源的大小及與磁力計的相對位置固定,一般假設(shè)不變,可做零偏處理。軟鐵干擾來自于磁力計附近的其余磁性材料的影響,軟鐵干擾一般是時變的擾動。針對時變擾動,可以采用基于閾值的方法或者基于模型的方法。
2.數(shù)據(jù)融合
人體運動跟蹤通過對信息的采集、坐標系的變換,得到人體位姿估計的結(jié)果。然而,單
個傳感器由于受到噪聲干擾等影響,往往導致姿態(tài)跟蹤精度較低。因此,多傳感器信息融合成為提高姿態(tài)跟蹤精度的良好途徑。人體運動跟蹤中最常采用的數(shù)據(jù)融合方法是互補濾波器和卡爾曼濾波器。隨著微型芯片計算能力的提高,粒子濾波等數(shù)據(jù)融合方法也逐漸被用于在線估計人體的姿態(tài)。
(1)互補濾波
加速度計和磁力計容易受到高頻噪聲的干擾,陀螺儀容易受到隨機漂移等低頻噪聲的干
擾,互補濾波器就是將加速度計和磁力計測量的靜態(tài)姿態(tài)通過低通濾波器去除高頻分量,將陀螺儀測量的動態(tài)姿態(tài)通過高通濾波器去除低頻分量,從而實現(xiàn)姿態(tài)信息的融合估計。
(2)卡爾曼濾波
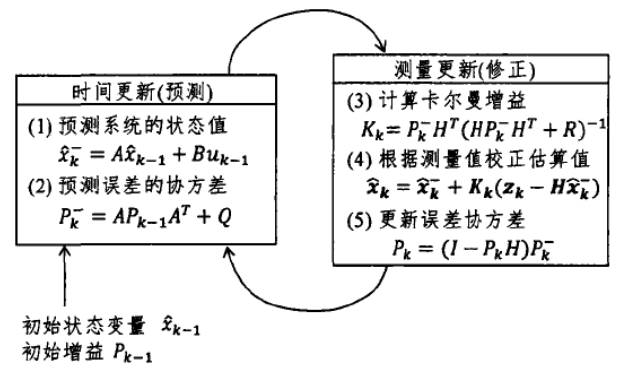
卡爾曼濾波包括線性卡爾曼濾波、擴展卡爾曼濾波、無跡卡爾曼濾波等。下圖所示為卡
爾曼濾波過程解析圖。卡爾曼濾波的核心過程可以劃分為兩個部分:時間更新,即對下一步的狀態(tài)變量進行預測;測量更新,即根據(jù)測量值對預測值進行一定的修正,得到估算值。通過設(shè)計不同的狀態(tài)變量和觀測量,可以衍生出各種具有不同特點的姿態(tài)算法。
(3)粒子濾波
粒子濾波算法的核心思想是利用一系列隨機樣本的加權(quán)和近似后驗概率密度函數(shù),通過
求和來近似積分操作。該算法源于蒙特卡洛思想,即以某事件出現(xiàn)的頻率來表示該事件的概率。因此在濾波過程中,需要用到概率的地方,對變量采樣,以大量采樣及其相應的權(quán)值來近似表示概率密度函數(shù)。
基于慣性傳感器的人體運動分析技術(shù),借助穿戴在身體各部位的MEMS傳感器,通過數(shù)據(jù)處理、融合和姿態(tài)解算方法可實時跟蹤分析人體運動姿態(tài),其在康復治療、影視制作、體育訓練等領(lǐng)域得到了廣泛應用,未來在開展基于慣性傳感器的人體運動分析時,傳感器和算法依舊是研究的重點。
參考資料:
1.基于慣性傳感器的運動感知機制研究
2.面向人體運動跟蹤的IMU_TOA融合定位模型與性能優(yōu)化研究
3.人體運動姿態(tài)傳感器抗磁場和大加速度干擾的方法及其步態(tài)分析應用研究
4.Effective Adaptive Kalman Filter for MEMS-IMU/Magnetometers Integrated Attitude and Heading Reference Systems
5.A Review of Accelerometer Sensor and Gyroscope Sensor in IMU Sensors on Motion Capture
作者:凌霄
浙江大學機械電子專業(yè)博士,從事智能傳感與人機交互,智能機器人控制等領(lǐng)域的研究
-
傳感器
+關(guān)注
關(guān)注
2551文章
51105瀏覽量
753615 -
電容
+關(guān)注
關(guān)注
100文章
6045瀏覽量
150344 -
mems
+關(guān)注
關(guān)注
129文章
3931瀏覽量
190635
發(fā)布評論請先 登錄
相關(guān)推薦
為什么講MEMS替代傳統(tǒng)傳感器是大勢所趨?
盤點5種應用最廣MEMS傳感器
MEMS和傳統(tǒng)傳感器的區(qū)別
如何選擇合適的MEMS傳感器
MEMS傳感器應用領(lǐng)域 MEMS技術(shù)在智能手機中的應用
AI崛起背景下,MEMS傳感器的出路在哪里
mems傳感器在消費電子中的應用有哪些
mems傳感器在汽車電子上的應用有哪些
mems傳感器是什么意思_mems傳感器原理是什么
MEMS流量傳感器的發(fā)展歷史與原理
60+圖片,10大MEMS傳感器原理全解析!網(wǎng)上很難找到!
強推!MEMS傳感器芯片是怎樣被制造出來的?(25+高清大圖)

MEMS氣體傳感器應用和發(fā)展
如何防止數(shù)字 MEMS 傳感器出現(xiàn)混疊現(xiàn)象






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論