 得“域”者得天下 ——域控制器如何成未來汽車標配?
得“域”者得天下 ——域控制器如何成未來汽車標配?
在下一代的車型中
植入域控制器的概念在所難免
其將改變汽車的架構和設計方式
甚至將“軟件定義汽車”變為“用戶定義汽車”
那么,概念被消費完畢后,下一步呢?
決定未來互聯和智能汽車的是以人工智能為核心的軟件技術,而不再是汽車的馬力和機械性能。軟件系統將集成和管理汽車的電子控制單元(ECU),改變汽車的DNA,實現車輛的動態控制,這就是軟件定義汽車(Software Defined Vehicle,SDV)。
車輛動態控制的變化趨勢
隨著消費者對交互式用戶體驗日益增長的關注,汽車將成為一個微型數據中心,這對由不同廠商開發的各種ECU帶來了較大的軟件挑戰,而開發、集成和管理眾多日趨復雜的軟件系統也限制了整車廠的創新和盈利能力。整車廠正在尋找集成ECU的新方法,改變ECU以前主要用于控制汽車從照明和轉向到ADAS和胎壓監測等各項功能的模式。
2020年,這種新的模式終于初具雛形,越來越多的整車廠將采用基于域控制單元(DCU)的方法將ECU集成為幾個部件。這種集成將實現新的增值功能,如軟件無線更新和維修保養提醒等服務。
我認為,下一步汽車將從“軟件定義”走向“用戶定義”,也就是全新的面向服務的架構(Service-Oriented Architecture,SOA)。參與汽車開發的廠商可以構建一個面向車載的全棧軟件方案,用戶需要是就可以下載什么,自己說了算。如摩根士丹利估計的那樣,未來自動駕駛汽車將有60%的價值源自軟件,軟件差異化對汽車的重要性不言而喻。
集中式架構:
半導體行業的汽車機會
未來十年,汽車工業將發生百年不遇的變化。這場變革源于四個相互促進的趨勢:自動駕駛、聯網汽車、車輛電氣化和共享出行。所有這些趨勢都有一個共同的推動因素:汽車軟件和電氣/電子(E/E)組件的進步。
汽車零部件市場的變化將影響半導體廠商的業務,域控制器的引入將為半導體行業帶來巨大的機會。在傳統汽車產業,普通消費者或車輛運營商購買并擁有汽車,依據車檢制度和法規,由經銷商進行有償驗車和維護。對于汽車行業,車載半導體供應商將開發的半導體和子系統交付給為整車廠商供貨的Tier1,業務就暫告一段落了。在大多數情況下,軟件是由Tier1和整車廠開發的,半導體廠商提供的嵌入式軟件并不能稱為產品,大多只是半導體使用中的示例而已。
對于服務于汽車和鄰近行業的半導體廠商來說,DCU的廣泛使用將為半導體廠商帶來新的機遇。根據麥肯錫預計,到2030年,全球軟件和電氣/電子組件市場將以每年7%的速度增長,是整個汽車行業3%的兩倍多。
全球軟件和電氣/電子組件市場預測
麥肯錫認為,伴隨發展趨勢,汽車系統將發生重大變化,尤其是在控制單元結構方面。目前,車輛依靠一個分散架構,其中每個單獨功能(如停車輔助),都運行在一個單獨的ECU上。這些功能通常是ECU硬件中的“硬編碼”,包括其設計和配置中的嵌入式軟件。
未來幾代汽車將采用一種集中式架構,用幾個DCU控制多個功能。例如,一個DCU可以覆蓋高級駕駛輔助系統(ADAS)的所有功能,包括泊車輔助和盲點檢測。DCU的硬編碼比ECU少,所以軟件將占主導地位。如果整車廠想為DCU增加另一個功能,只添加軟件即可,而不是創建新的硬件。隨著這種轉變,將不再需要同時開發或采購硬件和軟件。
隨著集中式架構的發展,DCU在汽車控制器市場的份額將在2020至2030年間從約2%增加到40%左右。這并不是說不要ECU,特別是對較低級別的功能,如攝像頭傳感器數據的預處理,或延遲非常關鍵的功能。但隨著車輛向軟件定義功能的過渡,ECU將變得越來越標準化和商品化,傳感器、線束和其他硬件組件也是這樣。
未來,整車廠將不必遵循傳統的采購方法,即要么依賴Tier1,要么自己定義規格由供應商提供。取而代之的是,他們將更多地依靠本地技術(包括半導體廠商)獲得關于最佳技術和架構的見解。而半導體廠商則必須與整車廠討論其需求,而不是僅僅依靠Tier1的報告,否則將會失去市場機會。半導體廠商更應投資于快速商品化的技術和基于標準DCU的產品。
什么是域控制器?
域控制器(DC)也叫域控制單元,還有直接跨域實現區域控制的多域控制器(Multi Domain Controller,MDC)。DCU概念是由博世和大陸等Tier1提出的,旨在解決信息安全和ECU開發瓶頸問題。
汽車DCU是一種高速計算設備,具有強大的硬件算力和各種軟件接口,可以使系統集成度更高,從而集成更多核心功能模塊,降低對功能感知和執行硬件的要求。它有助于汽車的機動化系統處理大量數據,包括自動駕駛。以類型來劃分,域控制器分為32位、64位和128位。通過集成多達上百個ECU,域控制器可減少電子架構的空間、功耗和復雜性,是車輛中每個新功能、特性和操作都要使用一個專用ECU的替代方案。
為了進行數字處理,域控制單元通常需要具有強大算力的內置核心處理器(CPU),以實現各個級別的智能駕駛艙和自動駕駛。處理器提供商包括英飛凌、NVIDIA、瑞薩、TI、NXP和Mobileye等。強大的多核CPU/GPU以集中方式控制每個域,以替代之前的分布式汽車電氣/電子架構(EEA)。
根據車型不同,域控制器分為乘用車和商用車,乘用車主導著域控制器市場,目的是解決ECU數量、電氣和電子結構復雜性不斷增加的難題;根據推進類型,域控制器分為電動汽車、混合動力汽車和內燃機(ICE)汽車,混合動力汽車是域控制器市場迅速擴張的部分。
任何事都有利有弊,由于與多個ECU相比,單個的“巨型”電子控制單元可能使汽車更容易受到網絡攻擊,加之目前的域控制器都是廠商各自為政,還沒有相關標準。
不過,作為下一代汽車電子結構的趨勢,域控制器可以用更少的器件完成更多的功能,同時價格更低,在加強汽車電子化功能的前提下,更方便管理各個子系統,已為整車廠和Tier1普遍接受。
經典五域漸成主流
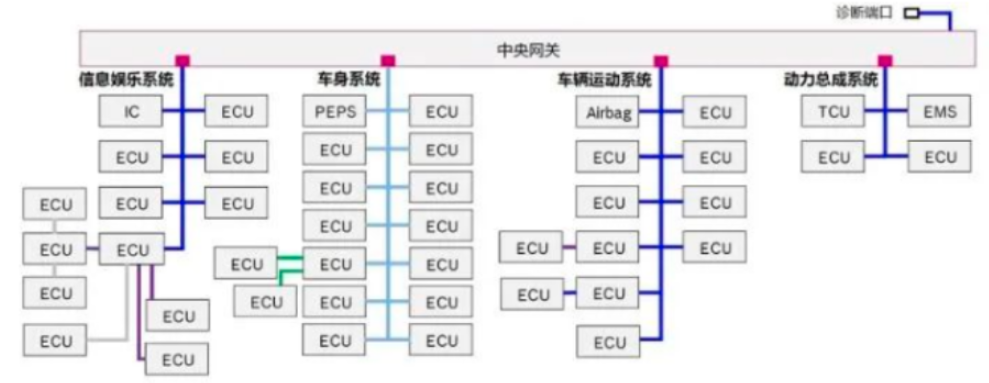
目前,從半導體廠商到Tier1和整車廠,都已認同汽車的五域劃分,如通過網關將連通性、(H)EV和動力總成、互聯信息娛樂、車身和舒適、ADAS到自動駕駛等5個域控制器連接起來,加速走向自動駕駛汽車。
恩智浦半導體汽車動力產品、汽車微控制器和處理器副總裁兼總經理Ray Cornyn表示:“汽車電子系統的主要增長動力包括降低復雜性和成本,實現安全、可升級性、個性化、易維護、高算力、更快進入市場、可定制,還有能源效率等。現在的低帶寬扁平網絡及每個應用配置一個MCU的方法不適合未來出行的要求,需要把平面變為分層,也就是域,利用高帶寬網絡和域間通信的網關密鑰實現互聯。”
經典五域引領汽車發展
近年來,里程焦慮已成為電動汽車發展的最大痛點,對于比BEV(電池動力汽車)和傳統ICE更復雜的xHEV(傳統ICE+eMotor)來說,需要進行能量優化,擴大續航里程。這就要使用HCU(混合動力控制單元)進行能量管理,選擇扭矩(ICE還是eMotor)、制動用法(再生還是摩擦),實現扭矩矢量控制及與其他模塊的通信等。但是,今天的MCU模型預測控制算法的算力明顯不足,只有采用25GFlops數學協處理器才能實現先進的預測性控制算法,將xEV里程擴展30%。
優化能量和扭矩來擴展行駛里程
Ray Cornyn指出,今天的HEV/EV控制系統是一種低集成度解決方案,耦合了許多歷史上獨立的模塊。而關鍵能量和扭矩管理功能(ETM)是一個虛擬任務,通常駐留在較大的控制模塊(INV、BMS、ICE)中。
作為一個關鍵業務戰略,領先的整車廠和Tier1正在向上集成到更強大和集中的架構中。整車廠將其視為簡化和集中化軟件的一種方式,并支持對里程和效率至關重要的未來高級能源管理計算任務;Tier1則將其視為一個可以支持所有硬件,同時為整車廠提供簡化的軟件集成和采購機會的關鍵。他說,所謂EV/HEV集成,就是將應用軟件遷移到推進域控制器中,用它來管理原來與推進有關的各個獨立模塊。
#FormatImgID_4#HEV/EV未來的域管理架構
為了向上集成軟件達到允許此級別功能的水平,未來HEV的管理需要關鍵的新架構功能。現代實時CPU架構可提供當今高端MCU 5-10倍的性能,而系統級封裝(SiP)MCU是一種新型汽車SiP MCU,包含適合標準汽車外形尺寸的多個片芯,可以在不包含組件的情況下將最佳技術用于每個功能;新的接口技術有助于高效的汽車SiP器件互聯。
基于域的新架構有助于降低成本
現在,車輛先進的安全性、舒適性和便利性帶來了巨大的好處,但100多個控制器、2億行代碼、1000多個依賴于多個ECU的功能,帶來了相當大的復雜性。整車廠經常抱怨“復雜性讓我們難以應對”。因為要使用ECU來實現更多功能,汽車系統架構和空間都會遇到極大的限制。為此,可以用駕駛艙域控制器把儀表板和主機集成在一起,將來再與空調控制、HUD、后視鏡、手勢識別、DMS甚至T-BOX和OBU融合在一起。
安波福(Aptiv)是用一種叫做智能車輛架構(Smart Vehicle Architecture?,SVA?)的多域控制器方案來幫助整車廠制造下一代車輛。安波福高級副總裁、首席技術官Glen De Vos說,這是為當今功能豐富和未來高度自動化車輛從頭開始設計的新架構。而且,SVA?有助于降低車輛生命周期,包括開發、制造和后期生產的所有階段的成本。
他表示,SVA?可以讓開發人員完全獨立于底層硬件來創建軟件,從而降低了復雜性。開發人員可以并行開發硬件和軟件,加快產品上市時間,降低集成和測試成本,還可以使用更豐富的功能,讓產品更快地進入市場。即使是在產品發布之后,也很容易通過動態上傳增加和更新軟件功能。總的看,這些技術可以將系統集成和測試成本降低75%,保修費用降低75%。
另外,SVA?還可以在兩個重要方面降低制造階段的成本。一是向上集成,將分布在車輛上多個ECU的功能集成到一組更小的域控制器集合中,使用PowerData中心(區域控制器)分解物理復雜性,實現通用子組件標準化。這樣,車輛能夠去掉多個微控制器、電源、外殼和銅線,實現集成和制造自動化。另一個降低成本的方法是減少勞動力。由于SVA?的區域控制器簡化了物理復雜性并直接連接到傳感器,所以線束可以控制在2.5米以下,只需要一兩個人安裝。而當今最復雜的架構安裝需要10人以上,使整車廠節省50%的勞動力成本。
此外,SVA?還可以減輕重量、包裝和線束重量,縮減電氣安裝的工廠占地面積,減少庫存保有單位(SKU),節省安裝配電勞動力。
通過從硬件中抽象出軟件,整車廠可以建立一個認證軟件庫(應用程序商店)。這些應用程序可以包括整車廠、Aptiv甚至第三方開發的軟件。整車廠和軟件開發人員可以使用OTA更新,在車輛的整個生命周期內升級軟件。車主無需到經銷商處解決問題,從而降低保修成本,提高品牌忠誠度和客戶滿意度。
據介紹,SVA?智能汽車架構靈活且容易擴展,組裝過程十分簡單,可以提升智能網聯汽車和自動駕駛汽車的安全性,可在后期為汽車架構更新支持軟件。SVA?汽車架構可以很好解決車內控制器過于繁瑣的問題,它能將車輛所有的計算集成到域控制器中;同時留出足夠的接口,以便后期使用中對汽車進行軟件更新,添加新功能。
車輛傳感器和其他硬件都能接入這一域控制器,域控制器也有足夠的冗余,可以充分提高車輛安全性。使用“Dock&Lock連接系統”連接各個區域的控制器,這樣就能夠使車輛組裝更加簡單。據稱,使用這種類型的車輛組件可以使車輛中的獨立零部件減少25%。
從ADAS說起
我們看到,自動駕駛汽車的出現、每輛車增加的電子元件,以及管理和監督機構對車輛舒適性、安全性要求的加強,正在推動汽車DCU市場的發展。汽車行業DCU市場的啟動源于高端豪華車的用戶偏好,而ADAS和安全功能是汽車DCU市場的重頭戲,此外還有發動機和動力傳動系統、底盤和車身控制系統、駕駛艙等。
在業內,人們更習慣看哪家頭部企業使用了什么產品,特斯拉無疑首當其沖。專家介紹,有以太網總線的才稱得上真正的域控制器,其核心是輸入系統和以太交換機。目前這個意義上的域控制器的應該只有特斯拉的AP3.0(FSD版)和奧迪A8的zFAS,其余很多域控制器只是虛擬機而已。
特斯拉域控制器的MCU用的是英飛凌AURIX? 家族的TriCore? TC297TA,目前業內大多使用這個器件。TC297TA是符合ASIL-D功能安全標準的多核高算力Infineon AURIX? 平臺的器件之一,具有領先的車載控制器運算能力,芯片內集成了很多底層可編程模塊,提供充分的應用層軟件運行資源,可滿足未來高級自動駕駛功能不斷優化升級的需求。
英飛凌現場應用工程師Florian Hailer介紹說:“AURIX? 是之前收購的Cypress與英飛凌的完美匹配,可以提供業界最全面的產品組合,將真實世界與數字世界聯系起來,包括一系列無與倫比的硬件、軟件和安全解決方案,適用于互聯時代。”
AURIX? TriCore? 將RISC處理器核心、微控制器和DSP元件組合在一個MCU中。基于TriCore?的產品瞄準的是各種汽車應用,包括內燃機、電動和混合動力汽車、變速器控制單元、底盤域、制動系統、電動助力轉向系統、安全氣囊、連通性和高級駕駛輔助系統的控制,迎合自動、清潔和聯網汽車趨勢。AURIX?家族還提供了優化電機控制應用和信號處理方面的出色表現。
針對自動駕駛域控制器應用,高性能AURIX? MCU可以滿足最高的安全標準,為安全關鍵型自動駕駛應用提供強大的性能。其功能包括實現多個環境傳感器(如雷達、攝像頭、超聲波和激光雷達)的傳感器數據融合、增強型ADAS功能(如十字路口交通輔助和自主避障)。由于系統可以做出關鍵的自主決策,可以保障汽車和數據安全,AURIX?與TLF35584安全電源和專用處理器結合,可支持全新和增強的ADAS功能。
再看ADCU
域控制具有實現模塊化集成的優勢,將功能劃分為單獨的域優勢明顯,不僅有助于加強各個子系統的功能和網絡安全性,還可以簡化自動駕駛算法的開發和部署,方便在各個子系統中擴展功能。因此,在自動駕駛背景下,國內外越來越多的Tier1及供應商都開始涉足這一領域。近年來,在半導體廠商的支持下,域控制器尤其是自動駕駛控制單元(ADCU)出現了精彩紛呈的景象。
首先是半導體廠商對ADAS和自動駕駛系統開發的支持,賽靈思推出的汽車級Zynq UltraScale+ MPSoC系列面向L2+到L4的ADAS應用和自動駕駛應用提供高速數據匯總、預處理和分配(DAPD)功能以及計算加速功能。這也意味著賽靈思汽車級產品線從邊緣傳感器拓展至復雜的域控制器。
恩智浦的BlueBox是一個開發平臺,能夠為開發自動駕駛汽車的工程師提供必要的性能、功能安全和可靠性。該器件集成了S32V234汽車視覺和傳感器融合處理器、嵌入式計算處理器S2084A和雷達微控制器S32R27。它具有高性能算力,具有ASIL-B計算、ASIL-D子系統及汽車I/O、8倍攝像頭等。
瑞薩的Autonomy平臺也是一個域控制器,是服務于ADAS和自動駕駛的開放、創新和可靠的平臺,由瑞薩的可持續、可擴展SoC和微控制器產品線組成。所采用的R-Car V3M高性能圖像識別SoC可大大優化智能攝像頭、全景環視系統、激光雷達等應用。它符合ISO26262功能安全標準,為視覺處理提供了低功耗硬件加速功能,還配有內置圖像信號處理器,可釋放主板空間并降低系統制造商的開發成本。R-Car芯片主要用作傳感器的采集分析和融合判斷。
高通發布的專門針對智能汽車的驍龍820A處理器采用14nm FinFET工藝的64位Kryo四核CPU和Adreno 530 GPU,支持600Mbps高速LTE移動上網速率,可以接入更多數據,對攝像頭和傳感器數據提供隨時響應,如3D導航、人臉識別、語音識別、娛樂系統、ADAS、環視泊車輔助等功能。軟件是Qualcomm與松下合作開發的基于驍龍820A的車載信息娛樂系統,運行最新的Android for Car。
Tier1的跟進腳步也很快,幾年前基于德爾福域控制器設計的產品zFAS已搭載于上汽奧迪A8,這款產品集成了英偉達Tegra K1處理器、Mobileye的EyeQ3芯片及Altera的Cyclone 5 FPGA芯片,可以個別控制不同模塊。
麥格納的MAX4自動駕駛平臺由攝像頭、激光雷達、超聲波傳感器和多域控制器組成,具有高度的靈活性,可以升級配置,即使是在電力不足的情況下也能完全發揮功效。該平臺搭載在一輛jeep大切諾基試驗車上,具有定制化和高擴展性的特點,可實現L4級別的自動駕駛,同時適用于城市道路和高速公路路況。
為了讓自動化駕駛有備無患,大陸集團用安全域控制器(SDCU)實現了自動化駕駛的降速。如果駕駛者對接管車輛指示視若無睹,汽車會進行操作,把風險降到最小。如果沒有應急停車帶或車道堵塞,則車輛會臨時停車并打開危險指示燈,或者一邊繼續向前行駛,一邊緩慢降速,直至找到可以安全停車的合適位置。
中國企業異軍突起
在DCU行業,近兩年來中國企業已經異軍突起,一些初創公司也紛紛布局,如德賽西威、百度、東軟睿馳、海高汽車、布谷鳥科技、環宇智行、知行科技等,這些企業目前都以新興和非一線傳統整車廠為主要客戶。
東軟睿馳面向L3、L4級別自動駕駛推出的中央域控制器基于NXP最新自動駕駛芯片S32V,可以滿足當前自動駕駛需求。在硬件方面,該控制器支持同時接入多路高清攝像頭、多路激光雷達、毫米波雷達、超聲波雷達,支持前方160米車輛檢測,100米行人、摩托車、自行車檢測及車道線檢測和移動障礙物檢測,能夠識別美國、歐洲、日本、中國等多個國家和地區的限速標識。在軟件方面,該控制器定制性強,便于后期整車廠個性化定制。
武漢環宇智行的第四代自動駕駛控制器TITAN4基于兩顆英偉達Xavier核心計算單元,支持激光雷達、毫米波雷達、慣導等多種傳感器的接入。TITAN4可搭載環宇智行研發的軟件系統ATHENA,支持高精地圖、路徑動態規劃等功能,可以進行多傳感器融合,實現車道線識別及車輛、行人識別和避障、一鍵招車、自主泊車以及編隊行駛等功能。除了高性能計算單元外,TITAN4也搭載了ASIL-D級MCU,整體設計符合功能安全。
環宇智行第四代自動駕駛控制器
蘇州知行汽車科技切入自動駕駛的方式是自己開發前裝智能前視攝像頭、自動駕駛域控制器及L2、L3級自動駕駛系統算法。其自動駕駛中央域控制器iMo DCU3-P專為L3級自動駕駛系統設計,使用車規級芯片設計,采用AUTOSAR軟件架構,具有ISO26262 ASIL-D功能安全,可支持多達6路攝像頭輸入和6路毫米波雷達輸入,支持激光雷達輸入和多傳感器數據融合,并可集成駕駛員監測功能,可以按照客戶需求定制。
德賽西威的智能駕駛域控制器IPU03是小鵬P7配套的自動駕駛方案的一部分。作為一款可量產車規級DCU,它滿足ISO26262功能安全ASIL-D等級,主要應用于L3級別自動駕駛方案。IPU 03的算力達到了30TOPS,可實時處理來自車輛雷達、攝像頭、激光雷達和超聲波系統的自動駕駛數據,運行感知、定位、規劃和控制等算法。
海高汽車的自動駕駛車輛域控制運算單元WiseADCU S1基于英偉達Jeston TX2+ARM A57 256CUDA,滿足功能安全ASIL-D標準。據說它與特斯拉AutoPilot 2.0自動駕駛系統算力相當,可幫助中國品牌自動駕駛車輛實現接近特斯拉的自動駕駛體驗。海高與國外自動駕駛公司的最大區別終于,可以根據不同車型需求,為整車廠針對性優化接口的類型和數量,在保證性能的同時盡可能降低國產車的自動駕駛制造成本。
目前,國內的一些廠商也在用TC297T開發ADCU,如北京經緯恒潤科技研發的集成式高性能計算單元,主要針對L2、L3級別自動駕駛需求。在ADCU硬件平臺基礎上,HiRain提供了自主研發的自動駕駛功能或對第三方研發功能的集成服務。
寫在最后:
下一代車型必有“域”
趨勢表明,在下一代的車型中,或多或少都會加入一部分域控制器的概念。未來,作為“區域決策中心”的“域”將改變汽車的架構和設計方式,甚至像上面說的,將“軟件定義汽車”變為“用戶定義汽車”!
還會發生什么呢?有業內專家認為,也許今天正在開發的域架構會走向兩個方向,一個是分區架構,而另一個將是中央計算的星形架構,我們將拭目以待。
域架構將走向何方?
責任編輯:haq
-
電動汽車
+關注
關注
156文章
12087瀏覽量
231275 -
半導體
+關注
關注
334文章
27367瀏覽量
218778 -
控制器
+關注
關注
112文章
16365瀏覽量
178075 -
智能汽車
+關注
關注
30文章
2852瀏覽量
107280
發布評論請先 登錄
相關推薦
經緯恒潤全棧底盤域控制器成功量產,開啟智能出行新篇章

Arm Cortex-R82AE賦能高性能區域控制器設計
求一種汽車域控制器DCU電源浪涌過壓保護方案
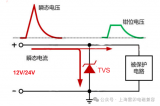

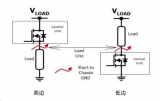
汽車區域控制器架構趨勢下,這三類的典型電路設計正在改變

微軟Windows Server更新導致域控制器崩潰與循環重啟
汽車區域控制器架構趨勢下的SmartFET應用
聯合電子推出面向跨域融合的新一代整車運動域控制器VCU8.6平臺

經緯恒潤全棧自研底盤域控制器量產
淺析ADAS域控制器技術
關于域控制器的基礎知識分享
上汽飛凡R7智聯域控制器模塊TBOX的拆解分析






 工商網監
工商網監
評論