") KUKA的碰撞識別(KSS版)
KUKA的碰撞識別(KSS版)
碰撞識別:
如果一個機器人與一個物件發(fā)生碰撞,則機器人控制系統(tǒng)將提高軸扭矩,以便克服阻力。這時可能會損壞機器人、工具或其它零部件。
碰撞識別將減小此類損壞的風(fēng)險。碰撞識別系統(tǒng)監(jiān)控軸轉(zhuǎn)矩。如果該轉(zhuǎn)矩與特定的公差范圍有偏差,將出現(xiàn)以下反應(yīng):
? 機器人以 STOP 2 停止。
? 信息 確認軸 {軸編號} 的碰撞識別
? 信號 $COLL_ALARM 變?yōu)?TRUE。 SIGNAL $COLL_ALARM FALSE
? 機器人控制系統(tǒng)調(diào)用程序 CollDetect_UserAction。
程序位于文件夾 R1Program 中。默認情況下,它不含指令。在需要時,用戶可以在 CollDetect_UserAction 中編程其所需的反應(yīng)。對此的前提條件是專家或更高級別的用戶組。
程序 CollDetect_UserAction 由機器人控制系統(tǒng)通過 $STOPMESS 中斷調(diào)用。因此,在編程時必須注意適用于相關(guān)中斷程序的限制。
SIGNAL $STOPMESS $OUT[4048] ;STOP-MELDUNG
碰撞識別的基本前提是:
? $IMPROVED_COLLMON == TRUE (這是默認設(shè)置。)
? $ADAP_ACC ≠ #NONE (這是默認設(shè)置。)$ADAP_ACC=#STEP2
? 負載數(shù)據(jù)正確。
在早期 KSS 版本中的程序中可能仍使用通過行指令 TORQMON SetLimits 編程的力矩監(jiān)控。該監(jiān)控基本上仍功能正常并且顯示出其早期特性。
但是,前提條件是:$IMPROVED_COLLMON == FALSE。因此,當(dāng)前版本的碰撞識別不可用。
基本上只能使用舊的力矩監(jiān)控 (TORQMON) 或者當(dāng)前的碰撞識別。不能一起使用這兩個功能。
即使在 $IMPROVED_COLLMON == FALSE 時,也不(!)可再編程之前的行指令 TORQMON。
在碰撞之后繼續(xù)運行
如果有信息 確認軸 {軸編號} 的碰撞識別,則在可以重新運行機器人之前,必須對其進行確認。如果不再有 $STOPMESS,信號 $COLL_ALARM 重新變?yōu)镕ALSE。
程序運行下的繼續(xù)運行:
如果在識別到的碰撞之后繼續(xù)程序運行(通過啟動或啟動反向),則該識別立即重新激活。
手動運行下的繼續(xù)運行:
如果要在識別到的碰撞之后手動運行,則自動中斷識別 60 ms。
在碰撞之后,作用力和力矩對機器人軸的作用很強,使識別功能可以持續(xù)地防止繼續(xù)運行。用戶必須手動退回機器人,即從碰撞位置移出。
有以下方法退回機器人:
? 通過運行鍵(手動移動選項,選項 軌跡)反向運行
自動取消碰撞識別 1 秒。機器人延之前運行的軌跡返回。
? 手動移動選項,選項跨接碰撞識別
用戶可以通過復(fù)選框跨接即停用碰撞識別。在通過復(fù)選框重新激活之前保持不激活狀態(tài)。
優(yōu)先使用選項軌跡進行回退。
在無法使用軌跡時才使用跨接碰撞識別,例如在碰撞后卡住了機器人時。
接通通用碰撞識別
通用碰撞識別的優(yōu)點是只需接通一次,而非為每個運動語句進行接通。但是,如果要確保即使在語句選擇之后碰撞識別也始終與確定的設(shè)置一起生效,必須為每個運動語句接通碰撞識別。
? 用戶權(quán)限:功能組一般 KRL 程序更改
? 已選擇或打開程序。
? 運行模式 T1
? 如果要使用 SetDefault 行指令:
在 KRC:STEUMada$custom.dat 中保存了值。
? 如果要使用 UseDataSet 行指令:
至少一個數(shù)據(jù)組已填充了值。
1. 選擇指令 > 移動參數(shù) > 碰撞識別。
2. 根據(jù)要從何處獲取碰撞識別的值,在行指令中選擇下面的條目:
? SetDefault 將 $custom.dat 中的默認值用于碰撞識別。

? SetLimits
為每個軸指定所需的碰撞識別靈敏度。默認:50%

? UseDataSet
選擇要為碰撞識別使用其值的數(shù)據(jù)組。

3. 按 指令 OK 鍵確認。
1.選擇指令 > 移動參數(shù) > 碰撞識別。在行指令中選擇 Off。
2.按 指令 OK 鍵確認
接通運動的碰撞識別
為了接通運動的碰撞識別功能,用戶可在運動行指令中選擇一個數(shù)據(jù)組。
同時接通了通用和運動上的碰撞識別:
可能同時接通了通用碰撞識別和運動碰撞識別。運動上的設(shè)置將覆蓋通用設(shè)置。
樣條段:
在樣條組內(nèi),默認情況下樣條段繼承該樣條組的設(shè)置。但是,用戶可以為每個段進行單獨的設(shè)置。
1. 如果在行指令中不顯示欄 ColDetect,則可以通過 切換參數(shù) > 碰撞識別 進行顯示。
2. 在行指令的 ColDetect 下選擇數(shù)據(jù)組。
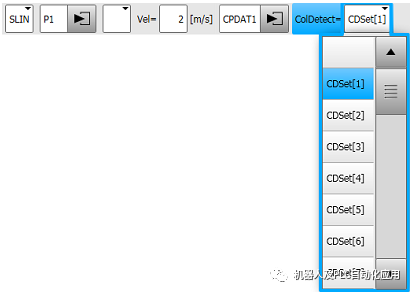
3. 用 指令 OK 確認選擇。
在編輯器中,該指令現(xiàn)在包含補充 ColDetect[編號]。

在帶數(shù)據(jù)組的列表的頂部有一個空欄。如果選擇該空欄,這表示:
? 此運動沒有自己的碰撞識別設(shè)置。如果接通了通用碰撞識別,則它將繼承其設(shè)置。
在樣條段中,該列表不含空欄。
如果希望樣條段沒有自己的設(shè)置,則在必要時通過 切換參數(shù) > 碰撞識別 隱藏 ColDetect 欄。但是,對于段“隱藏”已經(jīng)是默認狀態(tài)。
僅對于樣條段,數(shù)據(jù)組列表含有 OFF 條目。OFF 將關(guān)閉該段的碰撞識別。
在編輯器中顯示樣條設(shè)置
SPLINE S1 VEL=2 m/s CPDAT2 Tool[1] Base[1] ColDetect[1]
SLIN P2
SLIN P3 ColDetect[2]
SLIN P4 ColDetect=OFF
ENDPLINE
設(shè)置 ColDetect[1] 適用于樣條組。
SLIN P2 沒有自己的設(shè)置。這表示它將繼承樣條組的設(shè)置,即
ColDetect[1]。
ColDetect[2] 適用于 SLIN P3。
為 SLIN P4 關(guān)閉了碰撞識別。
在主菜單中選擇配置 > 碰撞識別 > 視圖。

| 1 | 軸編號 |
| 2 |
每個軸當(dāng)前已激活的極限。這可以是手動運行的極限或程序運行的極限。 該值越小,識別越靈敏。“0”表示該軸的識別未激活。 |
| 3 |
也在窗口 碰撞識別 - 手動運行配置 和 碰撞識別 - 數(shù)據(jù)組配置的相同列中顯示相同的值。用戶可以將這些值歸零。 ? 0 … 500 |
| 4 |
當(dāng)前用于手動運行的碰撞識別值 ? 該值基于窗口 碰撞識別 - 手動運行配置 的列 默認值。 ? 此外,從窗口 手動移動選項 中導(dǎo)入系數(shù) 標(biāo)準(zhǔn)值偏量。 |
| 5 |
? 灰色:碰撞識別未激活。 ? 綠色:碰撞識別已激活。 |
| 6 |
? 灰色:無碰撞。 ? 紅色:控制系統(tǒng)識別到碰撞。 |
| 7 | 將所有軸的峰值設(shè)為零。 |
$STOPMESS:
停止消息的信號聲明
設(shè)置此輸出是為了將需要停止機器人的任何消息的發(fā)生傳達給上級控制器。例如,在緊急停止或操作員安全違規(guī)后。
SIGNAL $STOPMESS $OUT[Output number]
責(zé)任編輯:lq
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6644瀏覽量
110729 -
機器人
+關(guān)注
關(guān)注
211文章
28575瀏覽量
207743 -
KUKA
+關(guān)注
關(guān)注
3文章
217瀏覽量
16574
原文標(biāo)題:KUKA的碰撞識別(KSS版)
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
KUKA機器人報警信息處理

USB3.0的識別問題

深度識別人臉識別有什么重要作用嗎

如何提高eCall碰撞測試成功率
人臉識別技術(shù)的原理介紹
人臉識別模型訓(xùn)練是什么意思
Kuka機器人配置Profinet通訊網(wǎng)關(guān)HT3S-PNS-ECS

基于神經(jīng)網(wǎng)絡(luò)的柯氏音血壓計
別克ELECTRA E5榮獲中保研C-IASI安全碰撞測試全優(yōu)評級

請問ST25RU3993-HPEV的自適應(yīng)防碰撞算法是在板子上面實現(xiàn)的嗎?
Fujitsu PalmSecure 手掌靜脈識別原理






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論