") 基于?LABVIEW?和?交流?伺服?電機(jī)的車輛?換?擋?桿?系統(tǒng)?方案
基于?LABVIEW?和?交流?伺服?電機(jī)的車輛?換?擋?桿?系統(tǒng)?方案
挑戰(zhàn):
車輛?換?擋?桿?耐久?試驗(yàn)?要求?車輛?換?擋?桿?在?指定?負(fù)載?條件,?以?一定?速度?在?兩?個(gè)?確定?工作?位置?間?運(yùn)行?大量?次數(shù)?(如?40?萬(wàn)?次),?并?對(duì)?運(yùn)行?中的?速度、?次數(shù)?等?參數(shù)?監(jiān)?控,?并?希望?預(yù)?留?對(duì)?系統(tǒng)?電流?及?電壓?等?參數(shù)?的?監(jiān)?控?擴(kuò)展?能力。?常見(jiàn)?的?基于?PLC?的?耐久?試驗(yàn)?臺(tái)?設(shè)計(jì)?方案?顯然?不能?滿足?運(yùn)行?過(guò)程?中的?速度、?次數(shù)、?電流?及?電壓?的?監(jiān)?控?及?可?擴(kuò)展?能力?的?要求。?基于?LABVIEW?和?交流?伺服?電機(jī)?的?試驗(yàn)?系統(tǒng)?采用?閉?環(huán)?控制?策略,?通過(guò)?系統(tǒng)?位置?信號(hào)?的?采集,?確定?電機(jī)?運(yùn)行?方向?與?速度?的?改變,?并?對(duì)?過(guò)程?中的?電壓?電流?等?監(jiān)?控,?為?系統(tǒng)?試驗(yàn)?的?智能?監(jiān)?控?和?分析?提供?科學(xué)?依據(jù)。
解決?方案:
基于?NI USB-6251?的?模擬?量?采集?模?塊,?利用?LABVIEW?的?DAQ?助手?的?Express?技術(shù),?實(shí)?時(shí)?采集?光電?開(kāi)關(guān)?信號(hào),?并?輸入?到?基于 LABVIEW?的?開(kāi)發(fā)?系統(tǒng)?中?進(jìn)行?采集、?比較?及?分析,?通過(guò)?基于?Modbus?協(xié)議?二次?開(kāi)發(fā)?的?程序?控制?交流?伺服?電機(jī)?以?指定?的?速度?和?方向?運(yùn)動(dòng),?并?到達(dá)?指定?位置?后?及時(shí)?返?向?運(yùn)動(dòng)?及?記?數(shù),?其中?針對(duì)?實(shí)際?運(yùn)行?中?出現(xiàn)?的?系統(tǒng)?失效?問(wèn)題,?增加?的?極限?位置?反轉(zhuǎn)?保護(hù)?方案?也是?本?系統(tǒng)?的?一個(gè)?創(chuàng)新。
1 引言
車輛?各?系統(tǒng)?及?零?部件?的?疲勞?耐久性?能?是?評(píng)價(jià)?汽車?質(zhì)量?的?重要?指標(biāo)。?因此?開(kāi)發(fā)?通用?的?耐久?試驗(yàn)?裝置?對(duì)?各?零?部件?進(jìn)行?測(cè)試?是?車輛?開(kāi)發(fā)?過(guò)程?中的?極為?重要?的?工作。?本文?以?某?款?車?型?的?換?擋?桿?耐久?試驗(yàn)?臺(tái)?的?搭建?為?例,?系統(tǒng)?說(shuō)明?了?光電?開(kāi)關(guān)?作用?原理、?開(kāi)關(guān)?觸發(fā)?信號(hào)?采集、?LABVIEW?編制?控制?程序?及?通過(guò)?LABVIEW?的?Modbus?協(xié)議?控制?伺服?電機(jī)?技術(shù)?等?關(guān)鍵?問(wèn)題,?并?針對(duì)?實(shí)際?中?可能?出現(xiàn)?的?問(wèn)題?增加?了?優(yōu)?化?程序?—?極限?位置?反轉(zhuǎn)?保護(hù)?方案,?避免?了?試驗(yàn)?臺(tái)?運(yùn)行?中?可能?出現(xiàn)?的?錯(cuò)誤。
2 系統(tǒng)?開(kāi)發(fā)?背景
車輛?的?換?擋?桿?試驗(yàn)?臺(tái)?用?來(lái)?考核?換?擋?系統(tǒng)?的?耐久性?能?的?專用?設(shè)備,?也是?車輛?零?部件?試驗(yàn)?中?重要?的?試驗(yàn)?之一。?如?某?款?車?型?試驗(yàn)?要求?如下:?換?擋?桿?經(jīng)?40?萬(wàn)?次?試驗(yàn)?后,?換?擋?桿?各?零?部件?無(wú)?破裂,?操作?靈活?且?無(wú)?卡?滯?現(xiàn)象;?換?擋?桿?力?載?荷?60N,?頻率?要求?0.5Hz。?其中?運(yùn)行?次數(shù)、?換?擋?力?載?荷?及?運(yùn)行?頻率?均?要求?實(shí)?時(shí)?可變。?圖 1?為?最終?搭建?的?換?擋?桿?耐久?試驗(yàn)?臺(tái)。?其中?重?塊?作為?負(fù)載,?伺服電 機(jī)?帶動(dòng)?轉(zhuǎn)盤?旋轉(zhuǎn),?通過(guò)?與?轉(zhuǎn)盤?連接?的?拉桿?機(jī)構(gòu)?實(shí)現(xiàn)?換?擋?桿?動(dòng)作,?換?擋?桿?的?兩?個(gè)?極限?位置?分別?通過(guò)?兩?個(gè)?鐵片?和?一個(gè)?光點(diǎn)?開(kāi)關(guān)?確定,?并?傳輸?到?USB-6251?中,?由于?伺服?電機(jī)?與?轉(zhuǎn)盤?的?傳?動(dòng)?比為?10,?則?電機(jī)?轉(zhuǎn)?速?設(shè)定?為?33rpm,?滿足?試驗(yàn)?要求。
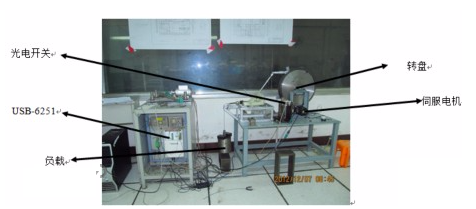
圖 1 ?換?擋?桿?耐久?試驗(yàn)?臺(tái)
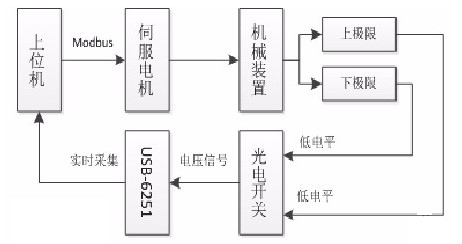
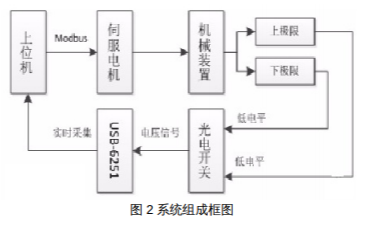
圖 2 ?系統(tǒng)?組成?框?圖
3 系統(tǒng)?組成?及?總體?設(shè)計(jì)?方案
根據(jù)?系統(tǒng)?的?功能?要求?本?系統(tǒng)?包括?上位?機(jī)、?NI?數(shù)據(jù)?采集?卡?USB-6251、?光電?開(kāi)關(guān)、?交流?伺服?電機(jī)?組成,?機(jī)械?裝置?五?部分,?系統(tǒng)?組成?框?圖?如?圖 2?所?示。?本?裝置?采用?美國(guó)?國(guó)家?儀表?公司?(National Instruments,?簡(jiǎn)稱?NI)?開(kāi)發(fā)?的?數(shù)據(jù)?采集?卡?USB-6251?實(shí)?時(shí)?采集?光電?開(kāi)關(guān)?的?模擬?電壓?信號(hào),?當(dāng)?機(jī)械?裝置?在?運(yùn)行?行程?中?光電?開(kāi)?光?輸出?高?電?平,?上位?機(jī)?不?動(dòng)作;?而?機(jī)械?裝置?運(yùn)行?到?預(yù)先?設(shè)置?上 /?下?極限?位置?時(shí),?光電?開(kāi)關(guān)?輸出?低?電?平,?上位?機(jī)?根據(jù)?用?Labview?編?訂?的?程序?完成?計(jì)數(shù)、?顯示?及?判斷?等?工作,?并?通過(guò)?Modbus?協(xié)議?控制?伺服?電機(jī)?向?反?方向?運(yùn)行,?從而?機(jī)械?裝置?進(jìn)入?下?一個(gè)?循環(huán)?周期,?直至?運(yùn)行?次數(shù)?滿足?要求。?運(yùn)行?頻率 /?速度?由?伺服?電機(jī)?的?速度?運(yùn)行?模式?實(shí)現(xiàn)。
3.1 傳感器?及?數(shù)據(jù)?采集?方案
光電?開(kāi)關(guān)?是?通過(guò)?把?光?強(qiáng)度?的?變化?轉(zhuǎn)換?成?電信?號(hào)?的?變化?來(lái)?實(shí)現(xiàn)?控制?的,?一般?情?由?發(fā)送?器,?接收?器?和?檢測(cè)?電路?三?部分?構(gòu)成。?它是?利用?被?檢測(cè)?物體?對(duì)?紅外?光束?的?遮光?或?反射,?由?同步?回路?選?通?而?檢測(cè)?物體?的?有?無(wú),?其?物體?不限于?金屬,?對(duì)?所有?能?反射?光線?的?物體?均可?檢測(cè)。?本文?選用?的?漫?反射?光電?開(kāi)關(guān)?是?一種?集?發(fā)射?器?和?接收?器?于?一體?的?傳感器,?當(dāng)?有?被?檢測(cè)?物體?經(jīng)過(guò)?時(shí),?將?光電?開(kāi)關(guān)?發(fā)射?器?發(fā)射?的?足夠?量的?光線?反射?到?接收?器,?于是?光電?開(kāi)關(guān)?就?產(chǎn)生?了?開(kāi)關(guān)?信號(hào)。
本文?選用?NI?公司?開(kāi)發(fā)?的?USB-6251?數(shù)據(jù)?采集?卡?及?Labview?軟件?的?Express?技術(shù)?快速?實(shí)現(xiàn)?光電?開(kāi)關(guān)?的?實(shí)?時(shí)?電壓?采集。?USB-6251?數(shù)據(jù)?采集?卡?是?NI?公司?最新?推出?的?USB?總?線?M?系列?數(shù)據(jù)?采集?產(chǎn)品,?可?提供?高達(dá)?16?路?模擬?輸入?通道,?并?達(dá)到?1.25 MS/?s?數(shù)據(jù)?采集?速率,?且?增加?了?USB?即?插?即?用?的?簡(jiǎn)單?易?用?性?以及?全新?高速?信號(hào)?流?技術(shù),?可?實(shí)?時(shí)?快速?的?采集?各種?物理?信號(hào)。?Express?技術(shù)?是?Labview?最新?提供?的?一種?快捷?簡(jiǎn)便?搭建?專業(yè)?測(cè)試?系統(tǒng)?的?技術(shù)?[1]。?它?將?各種?基本?函數(shù)?進(jìn)一步?打包?為?更加?智能,?功能?更加?豐富?的?函數(shù);?并?對(duì)?其中?某些?函數(shù)?提供?配置?對(duì)話?框,?通過(guò)?配置?框?可以?對(duì)?函數(shù)?進(jìn)行?詳細(xì)?的?配置,?因此?其?可以?實(shí)現(xiàn)?較?少?的?步驟?完成?功能?完善?的?測(cè)試?系統(tǒng),?尤其?對(duì)于?復(fù)雜?的?采集?系統(tǒng),?Express?技術(shù)?起?到了?極大?的?簡(jiǎn)化?作用。?圖 3?為?光電?開(kāi)關(guān)?電壓?信號(hào)?采集?設(shè)置?圖,?電壓?信號(hào)?最大值?及?最小值?設(shè)定?為?+10V?及 -10V,?采集?率?及?待?讀?取?采樣?均?設(shè)定?為?1,?即?1?秒?采集?1?個(gè)?并?實(shí)?時(shí)?的?傳?到?上位?機(jī),?采集?模式?設(shè)?為?連續(xù)?采樣。
3.2 Labview?控制?程序
采集?到?的?光電?開(kāi)關(guān)?信號(hào)?將?輸入?到?程序?中?執(zhí)行?控制?策略。?如?圖 4?所?示,?DAQ?助手?為?采用?Express?技術(shù)?建立?的?光電?開(kāi)關(guān)?電壓?信號(hào)?采集,?信號(hào)?實(shí)?時(shí)?輸入?到?循環(huán)?結(jié)構(gòu)?中?執(zhí)行?判定,?這里?閾?值?選定?為?5V,?即?電壓?信號(hào)?大于?5V(此時(shí)?電機(jī)?正常?運(yùn)行)?時(shí),?不?執(zhí)行?任何?操作;?當(dāng)?電壓?信號(hào)?低于?5V?時(shí)?(此時(shí)?電機(jī)?運(yùn)行?到?上 /?下?極限?位置)?時(shí),?首先?當(dāng)前?次數(shù)?增加?0.5(電機(jī)?在?上 /?下?極限?位置?間?運(yùn)行?一個(gè)?來(lái)回?定義?為?1)?并?比較?當(dāng)前?次數(shù)?是否?等于?循環(huán)?次數(shù),?等于?則?程序?停止;?不?等于?則?電機(jī)?反轉(zhuǎn),?程序?繼續(xù)?運(yùn)行。
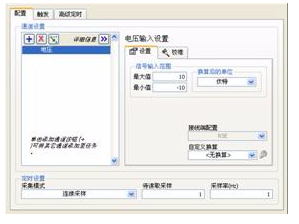
圖 3 ?光電?開(kāi)?光?電壓?信號(hào)?采集
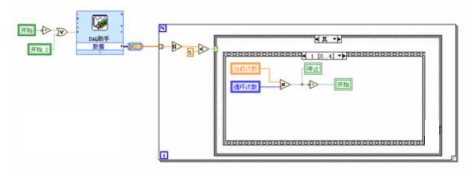
圖 4 ?光電?開(kāi)關(guān)?信號(hào)?的?判斷?與?計(jì)數(shù)
3.3 Modbus?協(xié)議?控制?伺服?電機(jī)?方案
圖 5?為?Labview?程序?采用?Modbus?協(xié)議?控制?伺服?電機(jī)?反轉(zhuǎn)。?Modbus 協(xié)議?是?應(yīng)用?于?電子?控制器?上?的?一種?通用?語(yǔ)言,?通過(guò)?此?協(xié)議?控制器?相互?之間、?控制器?和?其它?設(shè)備?之間?可以?通信。?它?已經(jīng)?成為?一?通用?工業(yè)?標(biāo)準(zhǔn)?[2,3]。?Modbus?協(xié)議?有?兩?種?傳輸?模式:?ASCII(American standard code for information interchange)?或?RTU(Remote terminal unit),?兩?種?方式?均?須?指定?串?口?通信?參數(shù)?(如?波特?率、?校?驗(yàn)?方式?等)。?伺服?電機(jī)?預(yù)先?設(shè)定?以下?參數(shù):?站?號(hào):?1;?傳輸?模式:?RTU;?數(shù)據(jù)?位:?8;?校?驗(yàn):?偶?校?驗(yàn);?停止?位:?1;?通訊?超?時(shí):?5000ms;?串?口號(hào):?Com4。?并?將?電機(jī)?內(nèi)部?寄存器?20B(16?進(jìn)制)?位置?設(shè)定?為?命令?輸入?反向?控制,?即?此?寄存器?變化?時(shí)?(即?由?106?變?yōu)?006,?或者?由?006?變?yōu)?106)?電機(jī)?反轉(zhuǎn);?缺?省?為?106,?電機(jī)?按?先?指定?方向?運(yùn)行。?圖 5?中?程序?首先?提取?內(nèi)部?寄存器?20B?位置?的?當(dāng)前?值,?通過(guò)?與?給?定?值?對(duì)比?判斷?后?再?輸入?新?值,?從而?實(shí)現(xiàn)?電機(jī)?反轉(zhuǎn)?的?操作。
3.4 極限?位置?反轉(zhuǎn)?保護(hù)?方案
在?電機(jī)?實(shí)際?運(yùn)行?中?采用?兩?個(gè)?光亮?的?金屬?鐵片?觸?出發(fā)?光電?開(kāi)關(guān),?由于?鐵片?的?寬度?和?電機(jī)?慣?性,?電機(jī)?往往?要?超過(guò)?鐵片?內(nèi)?側(cè)?邊緣?一部分?后?再?執(zhí)行?反轉(zhuǎn)?操作,?電機(jī)?反轉(zhuǎn)?初期?光電?開(kāi)關(guān)?仍?處于?低?電?平,?這?極?易?讓?程序?認(rèn)為?電機(jī)?已經(jīng)?到達(dá)?另?一個(gè)?界限?位置,?而?造成?電機(jī)?在?一個(gè)?極限?位置?附近?反復(fù)?運(yùn)行,?不能?正常?工作。?圖 6?為?程序?新?增加?的?極限?位置?反轉(zhuǎn)?保護(hù)?功能。?即?在?電機(jī)?運(yùn)行?到?極限?位置?后,?關(guān)閉?NI?數(shù)據(jù)?采集?功能?2?秒,?2?秒?后?數(shù)據(jù)?采集?再次?開(kāi)啟,?而?此時(shí)?光電?開(kāi)關(guān)?已經(jīng)?遠(yuǎn)離?觸發(fā)?鐵片,?不會(huì)?再次?發(fā)生?以上?問(wèn)題。
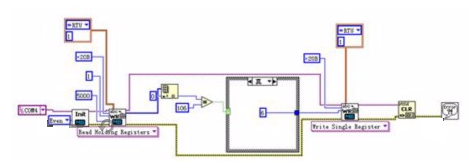
圖 5 ?Modbus?協(xié)議?控制?電機(jī)?反轉(zhuǎn)
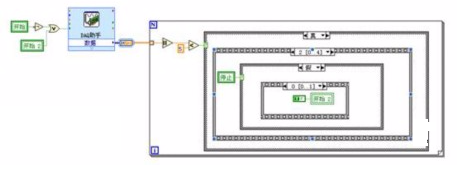
圖 6 ?極限?位置?反轉(zhuǎn)?保護(hù)
圖 7 ?換?擋?桿?耐久?試驗(yàn)?臺(tái)?人?機(jī)?交互?界面
4 軟件?實(shí)現(xiàn)
4.1 人?機(jī)?交互?界面
人?機(jī)?交互?界面?編輯?的?可見(jiàn)?即可?得?是?Laview?的?一個(gè)?重要?的?優(yōu)勢(shì)?[4]。?Labview?的?前?面板?包含?大量?形象?逼真?的?控?件,?用戶?還?可以?創(chuàng)建?自?定義?控?件。?前?面板?的?窗口?形式?可以?以?不同?的?方式?顯示?以?滿足?不同?的?需求,?用戶?可以?通過(guò)?按鈕、?對(duì)話?框、?聲音、?菜單?及?鍵盤?輸入?等?不同?方式?與?程序?進(jìn)行?交互。?圖 7?為?程序?設(shè)計(jì)?界面,?其中?清?零?按鈕?可以?將?當(dāng)前?次數(shù)?歸?零;?按下?設(shè)定?按鈕?將?有?一個(gè)?對(duì)話?框?彈出,?用戶?可以?通過(guò)?鍵盤?輸入?要求?的?循環(huán)?次數(shù);?再按?下?開(kāi)始?按鈕?程序?將?開(kāi)始?運(yùn)行,?同時(shí)?開(kāi)始?按鈕?將?保持?按下?狀態(tài),?開(kāi)始?命令?變?yōu)?暫停?功能,?可以?隨時(shí)?按下?暫停?程序;?停止?按鈕?將?退出?整個(gè)?程序。
4.2 未來(lái)?擴(kuò)展?能力
現(xiàn)在?設(shè)計(jì)?的?方案?僅?滿足?耐久?試驗(yàn)?的?循環(huán)?次數(shù)?要求?和?指定?速度?(通過(guò)?伺服?電機(jī))?的?參數(shù)?設(shè)定,?通過(guò)?電壓?和?電流?傳感器?將?電機(jī)?運(yùn)行?電流?電壓?信號(hào)?轉(zhuǎn)變?yōu)?模擬?電壓?信號(hào)?輸入?到?NI-6251?采集?前端,?并?在?軟件?中?設(shè)定?相應(yīng)?的?換算?參數(shù),?即可?實(shí)現(xiàn)?對(duì)?電機(jī)?參數(shù)?的?實(shí)施?監(jiān)?控。?在?以上?平臺(tái)?上?的?建立?基礎(chǔ)?上,?可?盡快?的?搭建?以上?平臺(tái),?并?建立?數(shù)據(jù)?保存?及?報(bào)警?功能。
5 結(jié)論
本文?通過(guò)?光電?開(kāi)關(guān)?發(fā)出?模擬?電壓?信號(hào),?NI?數(shù)據(jù)?采集?卡?采集?電壓?信號(hào)?并?輸入?到?上位?機(jī),?上位?機(jī)?中?運(yùn)行?使用?Labview?軟件?編制?的?人?機(jī)?接口?界面?及?數(shù)據(jù)?處理?程序,?根據(jù)?判斷?結(jié)果?通過(guò)?Modbus?協(xié)議?控制?交流?伺服?電機(jī)?實(shí)現(xiàn)?往復(fù)?動(dòng)作,?最后?增加?極限?位置?電機(jī)?反轉(zhuǎn)?程序,?解決?電機(jī)?運(yùn)行?過(guò)程?中?出現(xiàn)?的?極限?位置?控制?策略?失效?的?問(wèn)題。?實(shí)踐?證明?這種?搭建?的?試驗(yàn)?臺(tái)?的?技術(shù)?路線?及?控制?策略?是?可行?的,?同時(shí)?這?也是?一種?用?較?為?通用?方法,?不僅?能?滿足?換?擋?桿?耐久?試驗(yàn)?的?要求,?對(duì)?其他?零?部件?耐久?試驗(yàn)?臺(tái)?的?開(kāi)發(fā)?也有?參考?意義。
參考文獻(xiàn)
王?建?群,?南?金?瑞,?孫?逢?春,?付?立?鼎 . 基于?LabVIEW?的?數(shù)據(jù)?采集?系統(tǒng)?的?實(shí)現(xiàn),?計(jì)算?機(jī)?工程?與?應(yīng)用,?2003(21).
楊?樂(lè)?平,?李?海?濤,?肖?相生 . LabVIEW?程序?設(shè)計(jì)?與?應(yīng)用 . 北京:?電子?工業(yè)?出版社,?2001.
周?雋,?許?江寧,?孫?振?宇 . 基于?LabVIEW?的?交流?伺服?電機(jī)?轉(zhuǎn)?速?測(cè)試?方法?研究?和?設(shè)計(jì) .?船?電?技術(shù), 2009(3):?57~60.
陳錫?輝,?張?銀?鴻 . LabVIEW 8.20 程序?設(shè)計(jì)?從?入門?到?精通 . 北京:?清華大學(xué)?出版社,?2007(125).
編輯:hfy
-
LabVIEW
+關(guān)注
關(guān)注
1971文章
3654瀏覽量
323887 -
電機(jī)
+關(guān)注
關(guān)注
142文章
9023瀏覽量
145563 -
伺服電機(jī)
+關(guān)注
關(guān)注
85文章
2048瀏覽量
57900 -
接收?器
+關(guān)注
關(guān)注
0文章
1瀏覽量
510
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
交流伺服電機(jī)的工作原理
交流伺服電機(jī)和無(wú)刷直流伺服電機(jī)在功能上有什么區(qū)別
基于LabVIEW的直流伺服電機(jī)模糊PID控制系統(tǒng)
光電開(kāi)關(guān)及基于Labview與交流伺服電機(jī)的車輛換擋桿試驗(yàn)系統(tǒng)的研究

技術(shù) | 交流伺服電機(jī)振動(dòng)故障的分析與解決方案
如何使用LABVIEW和交流伺服電機(jī)解決車輛換擋桿系統(tǒng)的失效問(wèn)題
直流伺服電機(jī)和交流伺服電機(jī)哪個(gè)性能更好 交流伺服電機(jī)具有什么特點(diǎn)
交流伺服系統(tǒng)組成_交流伺服系統(tǒng)工作原理
直流伺服電機(jī)和交流伺服電機(jī)的區(qū)別
交流伺服電機(jī)控制系統(tǒng)是什么?
如何使用操縱桿和Arduino控制伺服電機(jī)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論