 基于OMAP5技術的高級駕駛員輔助系統(ADAS)
基于OMAP5技術的高級駕駛員輔助系統(ADAS)
德州儀器(TI)基于OMAP5技術的最新應用處理器TDA2x具有最先進的視覺加速加速器(PAC),可實現具有動力效率,低成本,可編程性和靈活性的高級駕駛員輔助系統(ADAS),為20/20視覺提供動力。自動駕駛汽車。Vision AccelerationPac是一種可編程加速器,具有特定的硬件單元和自定義管道,可以從高級語言進行完全編程。
介紹
到2013年9月,Google的自動駕駛汽車在計算機控制下完成了500,000英里的行駛,沒有發生任何事故。Google的顛覆性無人駕駛汽車項目旨在通過結合使用攝像機,雷達傳感器和激光測距儀來查看和導航交通(以及Google的地圖數據庫)來提高汽車的安全性和效率。
Google的無人駕駛汽車原型配備了150,000美元的機器人組件,其中包括價值70,000美元的激光雷達系統,這遠非商業用途。日產于2013年8月宣布計劃到2020年發布無人駕駛汽車,以實現零傷亡。自動駕駛汽車的商業化過程將集中在如何使自動駕駛汽車在各個角落情況下更實惠,更堅固和更安全。實現自動駕駛汽車的關鍵技術之一是計算機視覺,它使用基于攝像頭的視覺分析技術,旨在提供高度可靠,低成本的視覺解決方案。盡管基于攝像頭的傳感器的成本低于其他技術,但其處理要求卻大大提高。
當今的系統要求我們以30幀/秒的速度處理1280×800的圖像分辨率,通常同時運行5種或更多種算法。德州儀器(TI)基于OMAP5技術的最新應用處理器TDA2x具有最先進的視覺加速加速器(PAC),可實現具有動力效率,低成本,可編程性和靈活性的高級駕駛員輔助系統(ADAS),為20/20視覺提供動力。
自動駕駛汽車。Vision AccelerationPac是一種可編程加速器,具有特定的硬件單元和自定義管道,可以從高級語言進行完全編程。這使視覺開發人員可以利用標準處理器體系結構無法利用的新性能水平。Vision AccelerationPac的可編程性支持通過高級語言支持,使最終汽車制造商可以創新并探索各種算法的取舍。
鑒于這些算法還很不成熟,但是對于加快產品上市時間至關重要,因此這是一個特別重要的功能。Vision AccelerationPac的可編程性支持通過高級語言支持,使最終汽車制造商可以創新并探索各種算法的取舍。鑒于這些算法還很不成熟,但是對于加快產品上市時間至關重要,因此這是一個特別重要的功能。Vision AccelerationPac的可編程性支持通過高級語言支持,使最終汽車制造商可以創新并探索各種算法的取舍。鑒于這些算法還很不成熟,但是對于加快產品上市時間至關重要,因此這是一個特別重要的功能。
美國人口普查局的“看到汽車的統計數據”表明,美國每年平均發生600萬起機動車事故。16-24歲的年輕人和青少年的死亡率最高。統計數據還顯示,大多數事故是由人為錯誤引起的。
人們認為,將視覺和智能添加到機動車輛中可以減少人為錯誤并減少交通事故,從而挽救生命。人們還認為,汽車視覺系統可以幫助減少交通擁堵,增加高速公路通行能力,提高燃油效率并提高日常通勤的駕駛員舒適度。
先進的駕駛員輔助系統(ADAS)是邁向全自動駕駛汽車的關鍵一步。ADAS系統包括但不限于自適應巡航控制,車道保持輔助,盲點檢測,車道偏離警告,碰撞警告系統,智能速度自適應,交通標志識別。行人保護和物體檢測,自適應燈光控制和自動泊車輔助系統。
攝像機提供了一種低成本的方式來捕獲許多交通場景,以進行智能分析。立體聲前置攝像頭可用于自適應巡航控制,以捕獲實時交通狀況,以幫助保持與前方車輛的最佳距離。前置攝像頭還可用于車道保持輔助,以使汽車保持在車道中央,以及用于交通標志識別和物體檢測。側面攝像頭可用于跨交通監控,盲點檢測和行人識別。
攝像機背后的分析功能使汽車具有類似視覺的功能。需要一個實時視覺分析引擎來分析每個攝像機幀,以提取正確的信息以進行智能決策。它不僅需要巨大的計算能力來處理允許快速移動的車輛進行正確操作所需的瞬間間隔的數據,而且還需要寬泛的I / O來提供來自多個攝像機的視覺分析引擎輸入,以允許同時進行相關性。低功耗,低延遲和可靠性也是汽車視覺系統的關鍵方面。
TI Technology Enabler – Vision AccelerationPac
TI的Vision AccelerationPac是一款可編程加速器,專門為滿足汽車,機器視覺和機器人市場中計算機視覺應用中的處理,功率,延遲和可靠性需求而創建。Vision AccelerationPac包含一個或多個嵌入式視覺引擎(EVE),可為嵌入式視覺系統提供可編程性,靈活性,低延遲處理,功率效率以及較小的硅芯片面積。結果是性能和價值的完美結合。與現有的相同功率級別的ADAS系統相比,每個EVE都可以為高級視覺分析提供8倍以上的計算性能提升。有關詳細信息,請參見圖1。

針對Cortex-A15在相同功率預算下計算性能
圖2顯示了Vision AccelerationPac架構。Vision AccelerationPac中有一個或多個EVE,這是一種視覺優化的處理引擎,包括一個32位專用RISC處理器(ARP32)和一個512位矢量協處理器(VCOP),具有內置機制和獨特的視覺專用功能并發,低開銷處理的指令。ARP32包括32KB的程序高速緩存,以實現高效的程序執行。
它還具有內置的仿真模塊以簡化調試,并且與TI的Code Composer Studio?集成開發環境(IDE)兼容。共有3個并行的扁平存儲器接口,每個接口均具有256位負載和存儲帶寬,可提供768位寬的組合存儲帶寬(內部存儲器帶寬是大多數其他處理器的6倍),并具有總共96KB的L1數據存儲器以支持同步數據處理延遲非常短的運動。
每個EVE還具有一個本地專用的直接內存訪問(DMA),用于與主處理器內存之間的數據傳輸,以實現快速的數據移動;還有一個內存管理單元(MMU),用于地址轉換和內存保護。為了實現可靠的操作,每個EVE還在所有數據存儲器上配備了一位錯誤檢測功能,并在程序存儲器上配備了兩位錯誤檢測功能。
關鍵的體系結構功能是DMA引擎,控制引擎(RISC CPU)和處理引擎(VCOP)的完全并發。這允許,例如,ARP32 RISC CPU處理中斷或執行順序代碼,與此同時,VCOP執行循環并在后臺解碼另一個循環,同時移動數據而不會導致任何體系結構或內存子系統停頓。它還內置了對通過硬件郵箱進行處理器間通信的支持。EVE可實現8 GMACS處理性能和384-Gbps,在125°C時最壞情況下的總功耗僅為290mW,從而實現了最節能的視覺處理。

Vision AccelerationPac體系結構
編輯:hfy
-
應用處理器
+關注
關注
0文章
180瀏覽量
28302 -
adas
+關注
關注
309文章
2184瀏覽量
208650 -
自動駕駛
+關注
關注
784文章
13812瀏覽量
166457
發布評論請先 登錄
相關推薦

守護駕駛安全,駕駛員監控系統DMS應用解決方案

華為發布駕駛員行為異常檢測新專利
一文解析ADAS的基礎知識

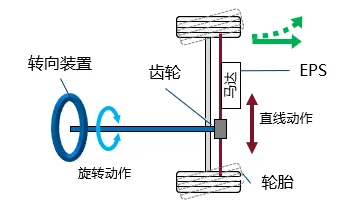
什么是EPS?通過馬達來輔助轉向操作的系統
基于Arm平臺的ADAS引領汽車安全未來
適用于高級駕駛輔助系統(ADAS)的TDA2Ex SoC 23mm封裝數據表

千億高級駕駛輔助市場不可或缺的技術,是提升LiDAR和ADAS性能的關鍵!

LeddarTech和Immervision達成合作,加速ADAS和AD感知模型訓練
用于駕駛員監控系統的近紅外LED驅動器STR-DMS-NCV7694-GEVB數據手冊
賦能廠商加速出海 虹軟駕駛員分心警告系統歐洲ADDW測試圓滿收官
Smart Eye宣布獲得車隊駕駛員監控系統AIS突破性訂單






 工商網監
工商網監
評論