 為什么選擇傳感器融合?
為什么選擇傳感器融合?
MEMS傳感器包括:加速度傳感器,用于測量線性加速度和地球重力矢量;陀螺儀,用于測量角速度;磁力計,用于測量地球磁場以用于航向確定;壓力傳感器,其用于測量氣壓以用于海拔確定。通過將這些組件組合到傳感器融合解決方案中,應用程序的數量變得非常大。本文通過描述一些使用互補濾波器的示例,說明了如何使這些傳感器在傳感器融合解決方案中協同工作。卡爾曼濾波器和擴展卡爾曼濾波器(EKF)。
對于自由落體檢測,屏幕旋轉,計步器,傾斜測量和運動檢測等應用,加速度計本身可以執行任務。但是,對于其他其他高級應用程序,包括基于位置的服務,增強型運動游戲,行人航位推測導航,機器人平衡,空中鼠標,人體跟蹤,無人飛行器等,為實現更好的性能,必須融合MEMS傳感器。系統級別的準確性,分辨率,穩定性和響應時間。傳感器融合是一組用于預測和過濾的自適應算法。它利用來自各種傳感器的不同和互補的信息,以一種智能的方式將它們組合在一起,以優化系統性能并啟用新的驚人應用程序。
為什么選擇傳感器融合?
在設計使用多個MEMS傳感器的系統時,重要的是要了解加速度計,陀螺儀,磁力計和壓力傳感器的優缺點。
傳感器融合解決了由3軸加速度計和3軸陀螺儀或3軸加速度計和3軸磁傳感器組成的6軸模塊的關鍵運動傳感性能問題。1)當陀螺儀隨時間漂移時,帶有加速度計和陀螺儀的6軸慣性模塊會失去其絕對方向,因此需要進行校準以恢復準確的航向參考值。2)帶有加速度計和磁力計的6軸模塊在環境中存在含鐵材料的情況下容易損壞數據。3)9軸模塊,帶加速度計,陀螺儀和磁力計消除了獨立傳感器解決方案中出現的漂移。但是這些可能會受到電磁干擾。需要融合傳感器數據的算法來補償電磁干擾。
傳感器融合的目的是將每個傳感器的測量數據作為輸入,然后應用數字濾波算法來相互補償,并輸出準確且響應迅速的動態姿態(俯仰/側傾/偏航)結果。
輔助濾波器
某些應用程序(例如機器人平衡,相機圖像穩定和3D指針)在系統中安裝了加速度計和陀螺儀。當系統靜止時,加速度計可以提供準確的傾斜角測量。當系統旋轉或運動時,加速度計將無法跟隨快速運動。陀螺儀可以輸出動態角速度數據。在對該數據進行時間上的單個積分之后,可以計算出角位移或傾斜角,但是由于陀螺儀偏置漂移,該角度從長遠來看將變得不準確。
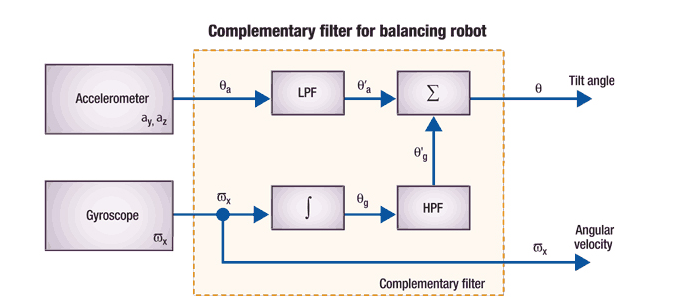
互補濾波器是融合加速度計和陀螺儀以及可選磁力計的簡單方法,以獲得準確和響應迅速的俯仰/側傾/偏航姿態輸出。它由用于加速度計的通用低通濾波器和用于陀螺儀的高通濾波器組成,與卡爾曼濾波器相比,它更易于理解和實現。以下示例說明了如何實現用于機器人自平衡的互補濾波器。
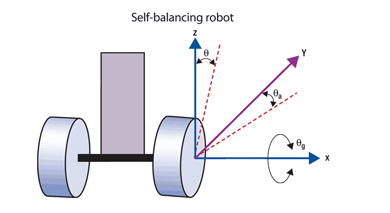
如上圖1所示,機器人具有一個用于測量靜態傾斜角θa的雙軸或三軸加速度計,以及一個用于測量動態傾斜角θg的單軸或雙軸陀螺儀。互補濾波器然后融合這些測量結果以獲得最終傾斜角θ。微處理器使用此信息和來自陀螺儀的角速度信息來控制電機,以平衡機器人。互補濾波器框圖如圖2所示,具有雙軸加速度計和單軸陀螺儀配置。
雙軸加速度計
編輯:hfy
-
傳感器
+關注
關注
2551文章
51099瀏覽量
753606 -
陀螺儀
+關注
關注
44文章
784瀏覽量
98716 -
壓力傳感器
+關注
關注
35文章
2216瀏覽量
163418 -
MEMS傳感器
+關注
關注
16文章
425瀏覽量
42458 -
加速度計
+關注
關注
6文章
702瀏覽量
45897
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論