") LiDAR如何構(gòu)建3D點(diǎn)云?如何利用LiDAR提供深度信息
LiDAR如何構(gòu)建3D點(diǎn)云?如何利用LiDAR提供深度信息
我們可通過(guò)傳感技術(shù)來(lái)獲取有關(guān)周?chē)h(huán)境的信息,從而使我們的日常生活受益:提高任務(wù)效率,增強(qiáng)安全性,或純粹出于娛樂(lè)目的。LiDAR是這樣一種傳感技術(shù),使用激光來(lái)測(cè)量到物體的距離,并可用于創(chuàng)建周?chē)h(huán)境的3D模型。LiDAR 系統(tǒng)捕獲的圖像中的每個(gè)像素都將具有與之關(guān)聯(lián)的深度。這樣可以更好地識(shí)別物體,并消除僅采用圖像傳感器獲得的2D圖像中可能存在的模糊。
LiDAR如何構(gòu)建3D點(diǎn)云?
LiDAR 通常使用直接飛行時(shí)間(dToF)技術(shù)來(lái)測(cè)量到物體的距離。短的激光脈沖發(fā)出后,其中的一些光被場(chǎng)景中的對(duì)象反射回并被傳感器如ArrayRDM-0112A20-QFN探測(cè)到,以準(zhǔn)確記錄激光脈沖往返所用時(shí)間(見(jiàn)圖1)。使用已知的光速,基于此dToF測(cè)量可計(jì)算出距離。這是視場(chǎng)內(nèi)的單距離測(cè)量。
為了構(gòu)建周?chē)h(huán)境的完整圖片,需要在場(chǎng)景中的許多不同位置重復(fù)進(jìn)行此點(diǎn)測(cè)量。這可通過(guò)安裝固定的傳感器和讓激光在整個(gè)場(chǎng)景中旋轉(zhuǎn)和掃描,或使用光束操控(beam steering)技術(shù)如微機(jī)電系統(tǒng) (MEMS) 鏡來(lái)實(shí)現(xiàn)。
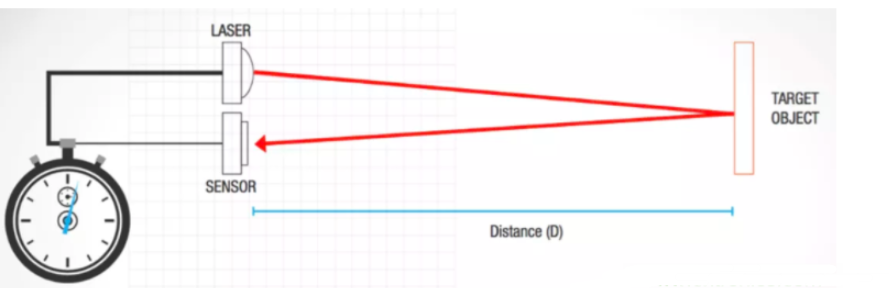
圖1:dToF技術(shù)示意圖
LiDAR系統(tǒng)通常依賴(lài)于以下關(guān)鍵組件:照明源,傳感器,光學(xué)器件,光束操控,信號(hào)處理和電源管理(圖2)。在性能方面,最關(guān)鍵的要素是照明源和傳感器。照明通常受用眼安全考量的限制,因此對(duì)系統(tǒng)性能的最大影響通常取決于傳感器。
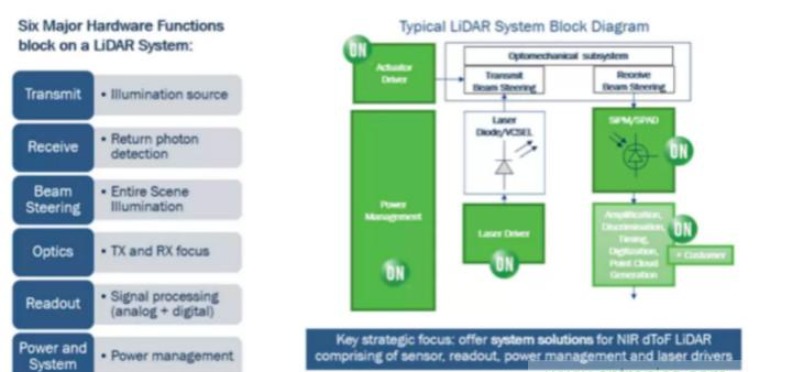
圖2:剖析含傳感器的dToF LiDAR系統(tǒng)
在許多場(chǎng)景下,系統(tǒng)運(yùn)行只有有限的信號(hào)返回,從遠(yuǎn)處或低反射率物體返回的信號(hào)可能只包含少量的光子。因此,傳感器應(yīng)盡可能靈敏。
LiDAR傳感器的靈敏度受不同因素綜合影響。首先,最重要的是探測(cè)效率,即入射光子將產(chǎn)生信號(hào)的概率。然后是對(duì)低入射通量或最小可檢測(cè)信號(hào)的靈敏度。某些傳感器如PIN二極管沒(méi)有內(nèi)部增益,因此單個(gè)探測(cè)到的光子將不會(huì)記錄傳感器固有噪聲以上的信息。
雪崩光電二極管(APD)具有一定的內(nèi)部增益(?100x),但是,由少量光子組成的入射信號(hào)不會(huì)記錄噪聲以上的信息,這要求它在一定的持續(xù)時(shí)間內(nèi)對(duì)返回的信號(hào)進(jìn)行整合。工作在蓋革(Geiger)模式下的傳感器,如硅光電倍增管(SiPM) 和單光子雪崩二極管(SPAD)的內(nèi)部增益約百萬(wàn)級(jí)(1,000,000x),因此,單個(gè)光子也會(huì)產(chǎn)生信號(hào),即使在內(nèi)部傳感器噪聲以上的信息也能可靠地探測(cè)到。這允許設(shè)置一個(gè)低閾值來(lái)探測(cè)最微弱的返回信號(hào)。
雖然SiPM和SPAD由于高增益而克服了許多噪音問(wèn)題,但在實(shí)際的LiDAR應(yīng)用中還需考慮到另一個(gè)噪聲源-環(huán)境太陽(yáng)光或處于陽(yáng)光下。我們常力求探測(cè)非常微弱的LiDAR返回信號(hào),同時(shí)受到不想要的太陽(yáng)光照射。因此,問(wèn)題變成了最大化其中的一個(gè)信號(hào)(返回的激光),同時(shí)忽略或最小化噪聲(陽(yáng)光)。一種方法是利用傳感器的單光子靈敏度,并尋找時(shí)間相關(guān)的光子。
這種多次dToF測(cè)量的方法是通過(guò)多次重復(fù)該過(guò)程(每次通過(guò)多個(gè)激光脈沖得出一個(gè)dToF測(cè)量值)來(lái)實(shí)現(xiàn)的。無(wú)需為每次測(cè)量計(jì)算距離,而是將每個(gè)飛行時(shí)間(ToF)值添加到直方圖或分布圖。結(jié)果是一個(gè)如圖3所示的曲線(xiàn)圖。
背景計(jì)數(shù)在時(shí)間上不相關(guān)-也就是說(shuō),相對(duì)于脈沖發(fā)射時(shí)間,它們?cè)跁r(shí)間上隨機(jī)到達(dá)。這些計(jì)數(shù)可以忽略不計(jì),因?yàn)樗鼈兪怯捎陉?yáng)光引起的噪聲。峰值代表時(shí)間相關(guān)的計(jì)數(shù)-大量計(jì)數(shù)都以相同的時(shí)間值到達(dá),表明是來(lái)自目標(biāo)的信號(hào)。該峰值可以轉(zhuǎn)換為特定幀的距離,且該過(guò)程可再次開(kāi)始。即使每幀每像素有幾十個(gè)激光周期,也可以實(shí)現(xiàn)30 fps的幀速率。
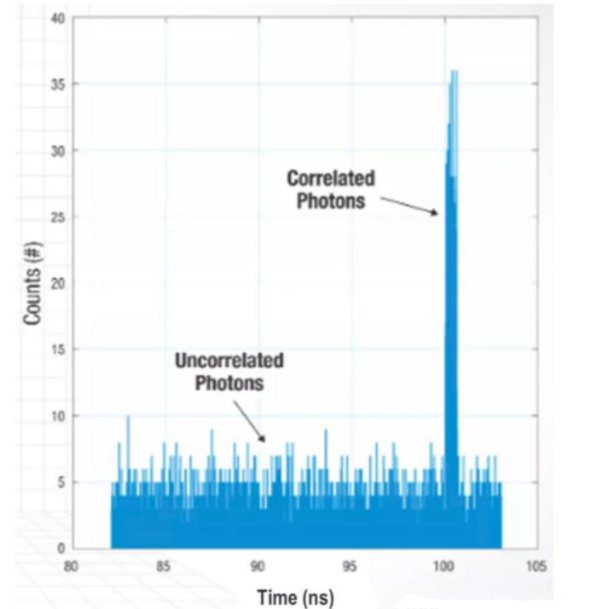
圖3:LiDARToF直方圖例
盡管SiPM 或SPAD傳感器可通過(guò)結(jié)合單光子靈敏度與時(shí)間相關(guān)技術(shù)來(lái)查看微弱的返回信號(hào),但PIN二極管或APD傳感器會(huì)丟失在太陽(yáng)背景中丟失的計(jì)數(shù)。因此,用這些其他傳感器類(lèi)型進(jìn)行測(cè)距根本無(wú)法達(dá)到那么遠(yuǎn)或那么高效。
現(xiàn)實(shí)世界中如何利用深度信息?LiDAR如何提供幫助?
迄今為止,消費(fèi)者移動(dòng)應(yīng)用程序僅通過(guò)圖像傳感器技術(shù)如使用結(jié)構(gòu)光就已啟用了許多功能。飛行時(shí)間(ToF)技術(shù)已在某種程度上被整合到手機(jī)中數(shù)年,以添加深度感知并賦能攝影功能,如快速自動(dòng)對(duì)焦和“散景”人像效果。
最近,dToF成像LiDAR傳感器已集成到最新的消費(fèi)類(lèi)移動(dòng)設(shè)備中,它比以前的技術(shù)提供更好的深度信息,且無(wú)疑將大大增加利用此數(shù)據(jù)的移動(dòng)應(yīng)用程序數(shù)。3D信息可用于實(shí)現(xiàn)3D繪圖應(yīng)用程序和改進(jìn)的擴(kuò)增實(shí)境和虛擬實(shí)境(AR / VR)體驗(yàn)。
在汽車(chē)和工業(yè)應(yīng)用中,安全性很重要,僅用圖像傳感器識(shí)別物體然后進(jìn)行自動(dòng)決策和導(dǎo)航有局限性,這凸顯了需要通過(guò)融合不同的傳感模式來(lái)獲取更多信息。LiDAR結(jié)合其他傳感技術(shù)如相機(jī)、超聲波和雷達(dá),可提供更多的冗余,從而提高負(fù)責(zé)導(dǎo)航或與環(huán)境交互的決策算法的置信度。這些技術(shù)中的每一種都有獨(dú)特的特性,可提供不同層面的信息,在不同情形下各有利弊。

圖4:對(duì)比不同的傳感器技術(shù)
要在汽車(chē)中啟用高性能LiDAR系統(tǒng),高度靈敏的傳感器如SiPM是最高效的接收器。安森美半導(dǎo)體的SiPM提供了無(wú)與倫比的性能和工作參數(shù):高光子探測(cè)效率,低噪聲和暗計(jì)數(shù)率結(jié)合低工作電壓,感溫性和工藝一致性。
ArrayRDM-0112A20-QFN是12像素線(xiàn)陣SiPM,解決市場(chǎng)對(duì)LiDAR的需求。它在905 nm處具有領(lǐng)先業(yè)界的18%光子探測(cè)效率,905 nm是高性?xún)r(jià)比的廣泛LiDAR系統(tǒng)市場(chǎng)的典型波長(zhǎng)。此外,它是市場(chǎng)上首個(gè)商用現(xiàn)貨線(xiàn)陣SiPM和首個(gè)符合車(chē)規(guī)的 SiPM。
編輯:hfy
-
傳感器
+關(guān)注
關(guān)注
2551文章
51099瀏覽量
753570 -
mems
+關(guān)注
關(guān)注
129文章
3931瀏覽量
190628 -
激光脈沖
+關(guān)注
關(guān)注
0文章
83瀏覽量
10279 -
LIDAR
+關(guān)注
關(guān)注
10文章
326瀏覽量
29423
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
LIDAR激光雷達(dá)逆向建模能用到revit當(dāng)中嗎
激光雷達(dá)點(diǎn)云數(shù)據(jù)包含哪些信息
LiDAR激光點(diǎn)云數(shù)據(jù)處理軟件處理流程
lidar傳感器和ryyb哪個(gè)好
lidar傳感器和激光測(cè)距傳感器的區(qū)別
Hokuyo Automatic發(fā)布新款3D激光雷達(dá)(LiDAR)傳感器YLM-10LX
什么是LiDAR?LiDAR技術(shù)的新時(shí)代 前景廣闊未來(lái)可期
康謀分享|aiSim5激光雷達(dá)LiDAR模型驗(yàn)證方法(二)

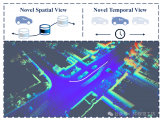
LiDAR4D:基于時(shí)空新穎的LiDAR視角合成框架
基于掩碼模型的LiDAR感知模型預(yù)訓(xùn)練策略

包含具有多種類(lèi)型信息的3D模型
基于深度學(xué)習(xí)的方法在處理3D點(diǎn)云進(jìn)行缺陷分類(lèi)應(yīng)用

Valeo為何堅(jiān)守著LiDAR?
基于LiDAR點(diǎn)流的運(yùn)動(dòng)事件檢測(cè)

兩種應(yīng)用于3D對(duì)象檢測(cè)的點(diǎn)云深度學(xué)習(xí)方法






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論