") 基于ARM微控制器和L298步進電機控制器實現(xiàn)探針驅(qū)動電路的設(shè)計
基于ARM微控制器和L298步進電機控制器實現(xiàn)探針驅(qū)動電路的設(shè)計
引言
掃描電化學(xué)顯微鏡(SECM)是80年代發(fā)展起來的一種電化學(xué)現(xiàn)場檢測新技術(shù)。該技術(shù)驅(qū)動非常小的電極(探針)在靠近樣品處進行掃描,樣品可以是金屬、半導(dǎo)體、高分子、生物基底等材料。SECM具有化學(xué)靈敏性,可測量微區(qū)內(nèi)物質(zhì)氧化或還原所產(chǎn)生的電化學(xué)電流,從而獲得對應(yīng)的微區(qū)電化學(xué)和相關(guān)信息。它主要由電化學(xué)部分(電解池、探頭、基底、各種電極和雙恒電位儀器),用來精確地控制、操作探頭和基底位置的位移驅(qū)動器,以及用來控制操作、獲取和分析數(shù)據(jù)的計算機(包括接口)等三部分組成,SECM系統(tǒng)原理如圖1所示。
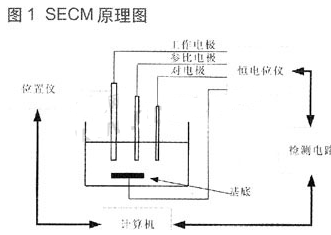
位移驅(qū)動部分是通過超精密定位技術(shù)(UMDE)實現(xiàn)對探針的三維空間微位移的精準(zhǔn)控制,操縱探頭和基底間保持相對穩(wěn)定,以便獲得樣品表面信息。它既是SECM控制系統(tǒng)的基本組成部分,也是SECM實現(xiàn)納米級分辨率的關(guān)鍵技術(shù)之一。為了獲取樣品盡可能完整的信息,要求驅(qū)動位移空間相對樣品有較大的量程,可達到厘米級別。同時高分辨率要求必須是超精密定位,分辨率可達到亞微米。因此,SECM的驅(qū)動部分采用宏微兩級位移控制系統(tǒng)。宏定位采用步進電機,微定位采用壓電陶瓷。一個好的驅(qū)動控制電路是影響SECM位移精度的關(guān)鍵因素,因此本文著重于設(shè)計二級位移系統(tǒng)的控制電路。
參進電機宏定位
步進電機作為角位移的執(zhí)行機構(gòu),當(dāng)步進驅(qū)動器接收到一個脈沖信號時,就驅(qū)動步進電機按設(shè)定的方向轉(zhuǎn)動一個固定的角度(即步進角)。由于可以通過控制離散的脈沖個數(shù)來控制角位移量,從而可以滿足SECM準(zhǔn)確宏定位的目的。步進電動機的控制占用火量的CPU工作時間,會影響了系統(tǒng)的整體性能。本驅(qū)動系統(tǒng)設(shè)計采用一種基于ARM微控制器的由L298構(gòu)成的控制和驅(qū)動電路,既不占用CPU大量的時間,又能獲得良好的控制和驅(qū)動效果。
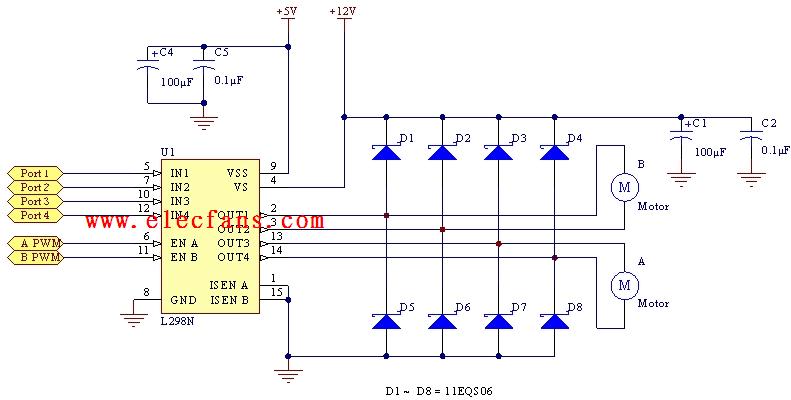
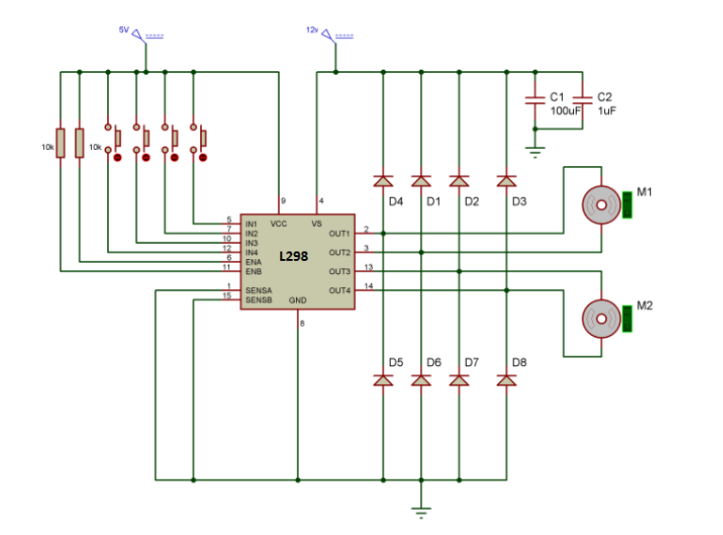
SGS公司的L298步進電機控制器的片內(nèi)PWM斬波電路產(chǎn)生開關(guān)式控制繞組電流。該器件的一個顯著特點是僅需時鐘、方向和模式輸入信號。步進電機所需相位由電路內(nèi)部產(chǎn)生,它產(chǎn)生兩相雙極性驅(qū)動信號和電機電流設(shè)定。L298內(nèi)含兩個高電壓人電流雙橋式驅(qū)動器,可驅(qū)動電壓最高46V、每相2.5A的步進電機,組成的兩相雙極性的步進電機驅(qū)動電路,原理如圖2所示。由ARM芯片LPC2138輸出PWM信號,經(jīng)過光電隔離器TLP521-2,再與兩個IO口組合送入雙輸入四與門74LS08實現(xiàn)正反轉(zhuǎn)控制。SECM需要三維驅(qū)動,此處只畫出一路電路。

壓電陶瓷微定位 壓電陶瓷驅(qū)動電源
壓電陶瓷是利用電介質(zhì)在電場中的壓電效應(yīng),直接將電能轉(zhuǎn)換成機械能,產(chǎn)生微位移的換能元件。因其高剛度、高頻響、推力大和高分辨率等優(yōu)點,廣泛應(yīng)用十航空航天、精密測量、生物工程、機器人等領(lǐng)域。驅(qū)動電源對壓電陶瓷和機構(gòu)的微位移影響很大,故性能良好的驅(qū)動電源是實現(xiàn)高精度位移的關(guān)鍵。壓電陶瓷對驅(qū)動電源要求如下:一定范圍內(nèi)連續(xù)可調(diào)、輸出穩(wěn)定性好、紋波小、分辨率高。
壓電陶瓷驅(qū)動電源從原理講可以分為電壓控制型和電荷控制型。這里采用電壓控制型,由直流放大器芯片對控制電壓信號進行線性放大和功率放大,輸出0~150V連續(xù)可調(diào)的直流電壓。它決定著電源輸出電壓的分辨率和穩(wěn)定性,是整個電源的關(guān)鍵。
高壓運放電路
Apex公司的PA69是一個高壓、高速功率運算放大器,可采用單/雙電源供電;轉(zhuǎn)換速率非常高,可達到200 V/μS;可以提供高達50mA的恒定輸出電流,其峰值輸山電流達100mA。PA69待機電流很小,一般不到1mA;具有限流保護功能。
選用的壓電陶瓷等效電容為0.1μF,需要0~150V的連續(xù)可調(diào)輸出電壓,頻率0~1kHz(正弦波),則所需轉(zhuǎn)換速率為:
S.R=2πfV(1×l0-6)=2π×1000×150×(1×10-6)=0.94V/μS
所需最大負(fù)載電流為:
I=S.R×CL=0.94V/μS×0.1μF=94mA
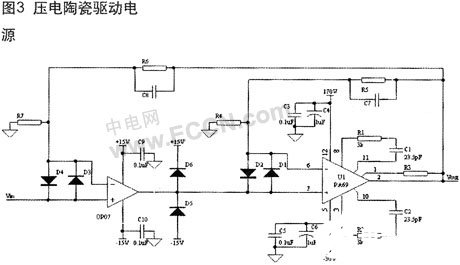
所選定的PA69運算放大器符合要求,電路如圖3所示。其中引腳6、7為輸入,2為輸出,3和10以及8和11外接補償電阻和電容,構(gòu)成相位補償網(wǎng)絡(luò),實現(xiàn)相位補償。1和2引腳之間接限流電阻,形成對運放的限流保護功能。
失調(diào)電壓補償
在室溫(25℃)及標(biāo)準(zhǔn)電源電壓下,輸入電壓為零時,為使集成運放的輸出電壓為零,在輸入端加入失調(diào)電壓VIO。實際上指輸入電壓V1=0時,輸出電壓VO折合到輸入端的電壓是負(fù)值,即VIO= - (VO|VI=0)/AVO。
PA69的最大失調(diào)電壓為3mV,對分辨率要求為10mV以下的壓電陶瓷驅(qū)動電源,PA69的輸入特性不能滿足設(shè)計要求,需要對電路的前級輸入進行優(yōu)化。為了減小輸入失調(diào)電壓,在該電源的線型放大部分,采用由OP07和PA69組成復(fù)合放大電路。MAXIM公司的OP07具有高精度輸入失調(diào)電壓,最大為75μV。由PA69和OP07組成一個新的具有負(fù)反饋的放大器,其輸入失調(diào)電壓為75μV×30=1.5mV《10mV,滿足輸入特性的要求。
放大器的輸入電壓為0~5V,輸出電壓為0~150V,故根據(jù)特性曲線選定PA69的閉環(huán)放大倍數(shù)為30。整體電路如圖3所示。
責(zé)任編輯:gt
-
微控制器
+關(guān)注
關(guān)注
48文章
7596瀏覽量
151746 -
驅(qū)動器
+關(guān)注
關(guān)注
53文章
8263瀏覽量
146699 -
ARM
+關(guān)注
關(guān)注
134文章
9137瀏覽量
368260
發(fā)布評論請先 登錄
相關(guān)推薦
基于STM32微控制器和STSPIN L6474步進電機驅(qū)動器設(shè)計
L297和L298芯片混合式步進電機控制器的keil程序和電路圖免費下載

使用Arduino和L298電機驅(qū)動器制作直流電機速度控制器

如何測試TB6600步進電機驅(qū)動器控制器和步進電機






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論