 將單級步進電機作為雙級步進電機進行驅動
將單級步進電機作為雙級步進電機進行驅動
步進電機有許多不同類型,但永磁體和混合步進電機有兩種主要繞組配置,通過兩相驅動——單極性和雙極性。單極電機的常見接線配置是連接到電機繞組(A +,A-,B +和B-)的六根導線,以及連接到電機供電電壓Vm的每相的中心抽頭,如圖1所示。
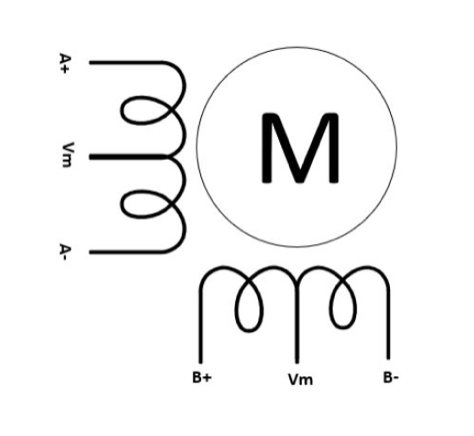
圖1:六線單極步進電機繞組連接
這種配置中,電機通過接通電機繞組的各個段來進行換向,這意味著電流僅需在一個方向上流動。這種配置可以簡化驅動電路的設計,因為只需要四個低側開關和續流二極管即可接通繞組的各個段。圖2說明了采用2.0A單極步進電機驅動DRV8805的此類配置
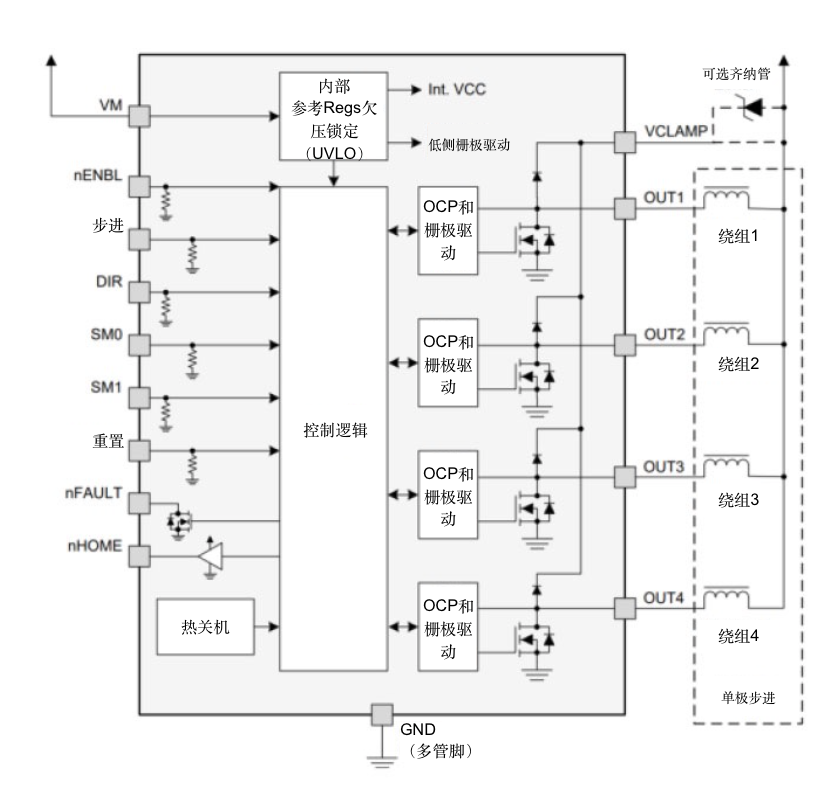
圖2:DRV8805與單極電機連接時的布線
簡化設計需要權衡的因素是:在任何給定時刻,電機僅使用一半的繞組,從而無法實現最大的轉矩能力。
相反,雙極步進電機只有四根導線連到電機繞組,分別標記為A+、A-、B+和B-。如圖3所示,雙極步進電機沒有中心Vm抽頭。
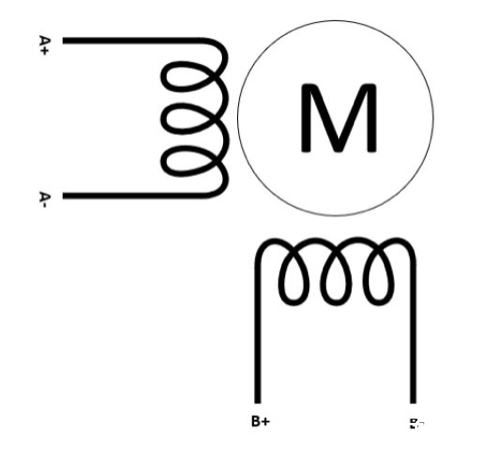
圖3:四線雙極步進電機繞組連接
由于缺少中心抽頭,雙極步進電機需要電流雙向流入繞組,因此需要更多的電子器件來推挽電流。現在可接通全繞組,從而產生比單機繞組配置更高的可用轉矩。
通過對繞組連接進行少量重新配置后,可將單極步進電機用作雙極步進電機。使用六線單極電機執行此操作時,請斷開各相中心Vm抽頭的連接,并用電工膠帶將其粘住。如圖4所示,這種也稱為雙極串聯的布線配置現在允許雙向(雙極)電流在電機繞組中流動。
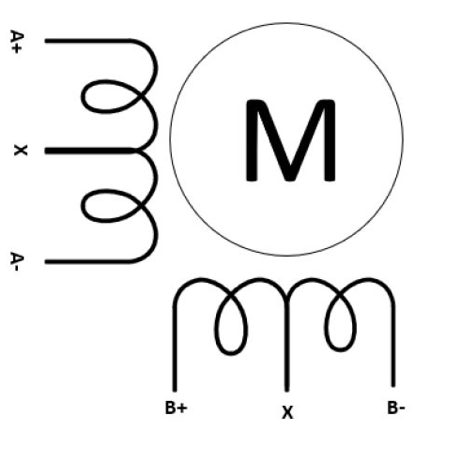
圖4:配置單極步進電機繞組
作為雙極串聯步進電機進行驅動
這種重新配置確實存在一些基本權衡因素。雙極串聯配置為整個繞組供電,因此與單極步進電機相比,在保持位置和較低速度下可獲得更高轉矩。但這給雙極串聯步進電機帶來了更高的總電感,且在更高速度下,其有效轉矩的下降速度要比單極配置的下降速度更快(圖5)。
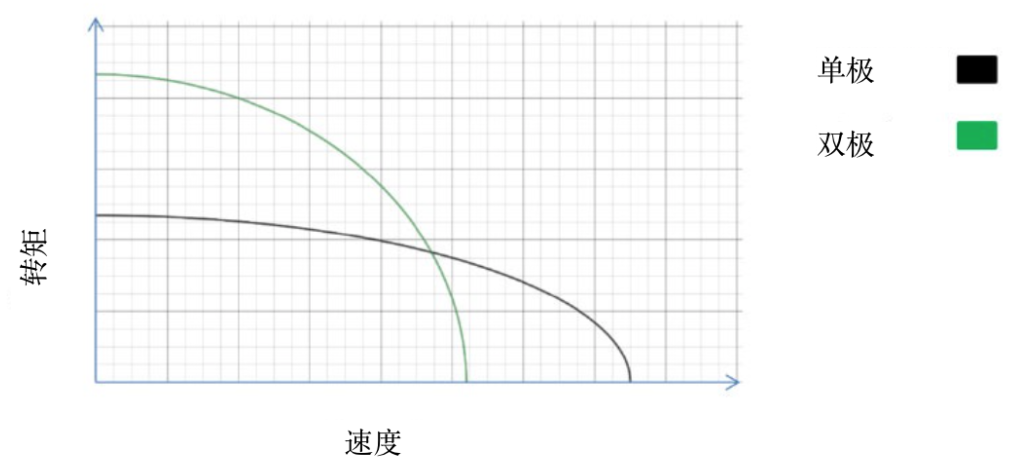
圖5:單極與雙極串聯步進電機轉矩/速度曲線
此行為歸因于輸出轉矩與速度和電感的反比例關系,如公式1所示:
該公式中,τ是轉矩,Vm是電機供電電壓,v是電機速度,L是電機電感。
許多應用都可在其系統中使用單極或雙極步進電機,包括暖通電子膨脹閥、ATM模塊和打印機。無論步進電機的類型如何,使用雙極步進電機驅動集成電路均具有優勢。您可以:
減少在不同電機類型的系統之間重新設計電路板的時間,
采購更少的組件,并且
提供更廣泛的產品和性能。
TI 的20-V、2.0-A DRV8847和50-V、1.5-A DRV8436等步進電機驅動可以靈活地驅動單極步進電機和雙極步進電機。 我們還提供專用的單極步進驅動器,例如 2.0-ADRV8803、DRV8804、DRV8805和DRV8806。
責任編輯:haq
-
集成電路
+關注
關注
5388文章
11547瀏覽量
361828 -
驅動
+關注
關注
12文章
1840瀏覽量
85292
發布評論請先 登錄
相關推薦
步進電機如何自適應控制?步進電機如何細分驅動控制?

基于NSUC1610的步進電機控制原理及其實際應用

什么是雙極性步進電機?它有哪些特點?

步進電機常見問題及維護






 工商網監
工商網監
評論