 基于工控機和Lab Windows/CVI工具實現靜模系統的軟硬件設計
基于工控機和Lab Windows/CVI工具實現靜模系統的軟硬件設計
作者:王新超,潘貞存,高厚磊
電力系統靜態模擬簡稱靜模,是根據相似性原理建立的一種物理模擬。它利用線路等值阻抗模擬實際線路,用等值電源替代發電機構成模擬系統,可以模擬除系統振蕩和發電機電磁暫態過程以外的各種運行狀態,包括正常狀態和事故狀態,從而可以對繼電保護和自動裝置動作的可靠性進行實驗,是教學、科研、保護設備整定校驗的得力助手。
當前計算機監控技術在電力系統中得到了廣泛的應用,并成為靜模技術發展的一個重要方向。靜模系統的數據可以由計算機數據采集系統得到,并通過計算機實時處理,而故障的設置及開關操作等經常性的工作可采用計算機進行控制。這就進一步提高了靜模系統的靈活性和自動化水平。
1 靜模系統的構成及基本功能
靜模系統主要由三大部分構成,即一次模擬系統、智能化監控系統和繼電保護裝置,其結構見圖1。
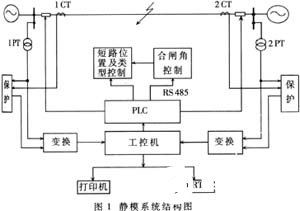
一次模擬系統主要由雙側電源、模擬線路、斷路器、PT(電壓互感器)、CT(電流互感器)和控制回路等部分組成,完成一次系統的模擬和手動控制功能。
智能化監控系統主要由模擬量采集模塊、開關量采集模塊、586工業控制計算機、可編程邏輯控制器(PLC)、執行繼電器箱和打印機等部分組成。主要完成以下功能:
(1)采集和處理模擬線路兩端電壓、電流等模擬量;
(2)模擬線路主接線和運行參數的定時顯示及故障數據的存儲和分析;
(3)監視兩側斷路器位置及各開關量位置,監視保護動作出口的狀態;
(4)線路兩側斷路器的跳、合閘控制;
(5)在模擬線路的11個短路模擬點上,選定任意一個短路模擬點,設置故障類型、合閘角及故障時間;
(6)控制短路開關(DLABC)的關斷。
繼電保護裝置為微機實現的數字式超高壓線路成套快速保護裝置。由于裝置以短路開關替代機電開關制造短路,所以對于兩相以上的并發短路故障的同時性,有了更為精確的實現,其短路角度的任意設置,更為裝置的應用提供了寬松的條件。
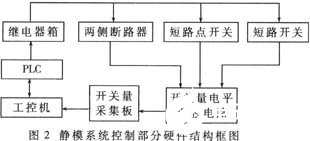
2 靜模系統控制部分的硬件組成
靜模系統計算機控制部分實現簡單故障的設置、兩側斷路器的開關操作和各種開關量的采集及顯示等功能。靜模系統控制部分硬件結構框圖如圖2所示。
2.1 工控機
2.2 可編程邏輯控制器
可編程邏輯控制器采用OMRON新一代產品CQM1,它比較適合于小規模機器控制,可實現高速輸入輸出應答,包括中斷輸入處理、間隔時間中斷處理,內部高速計數器可實現精確定時、計數以及頻率變換等復雜功能。其網絡聯接有標準RS232、RS485端口與計算機連接,實現與計算機的信息交換。
在本裝置中,工控機的控制命令通過RS-232C串口,按照約定好的通訊協議,以串行通訊的方式傳送給可編程邏輯控制器(PLC),利用PLC具有邏輯控制、時序控制、計時控制的特點,將這一命令轉變成可具體實現的時序控制命令,控制相應的接觸器和智能合閘角控制電路,從而完成故障設置或開關操作任務。
2.3 開關量采集板
開關量采集板PC-DIO-24/Pnp是一個24位并行數字輸入/輸出接口板,可對其進行8位、16位或24位編程,它接于計算機ISA數據總線,具有即插即用功能。在本系統中開關量采集板的24位輸入/輸出數據位均置輸入狀態使用。
2.4智能合閘角控制裝置
智能合閘角控制裝置由TK-51CUP板、電壓鑒相電路、RS485串行通信接口、手動合閘角設置開關、光電隔離、觸發驅動電路、雙向可控硅等7部分組成,如圖3所示。
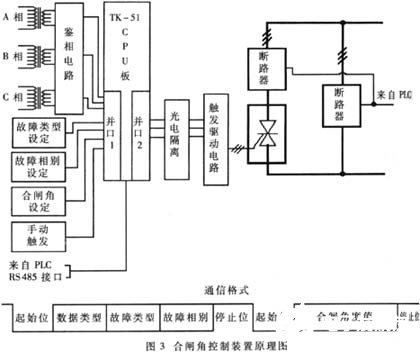
裝置的啟動合閘方式,可由故障類型、故障相別、合閘角等參數決定。其中故障類型定義為單相、雙相、三相接地短路;故障相別分為A、B、C相。由于電壓鑒相采用3個獨立回路,因此可以方便地實現合閘角的A、B、C相基準任意選擇。
合閘角設置定義了手動與自動兩種方式。手動設置通過三段式十進制撥碼開關實現“0~360度”的任意設定,又用兩個單段式十進制撥碼開關分別實現故障類型、故障相別的選擇,通過手動觸發按鈕可直接觸發雙向可控硅,制造短路故障。自動設置由PLC通過RS485總線傳送故障類型、故障相別、合閘角以實現方式設置;傳送校驗采取回送式,即CPU板將接收到的全部指令數據碼傳回PLC,以便由PLC決定是否重發,如校驗無誤,即發出觸發指令。手動與自動設置的切換采用點按“切換按鈕”切換至手動設置,而用PLC對合閘角電路的每次命令刷新將設置切換到自動狀態。
3 軟件系統
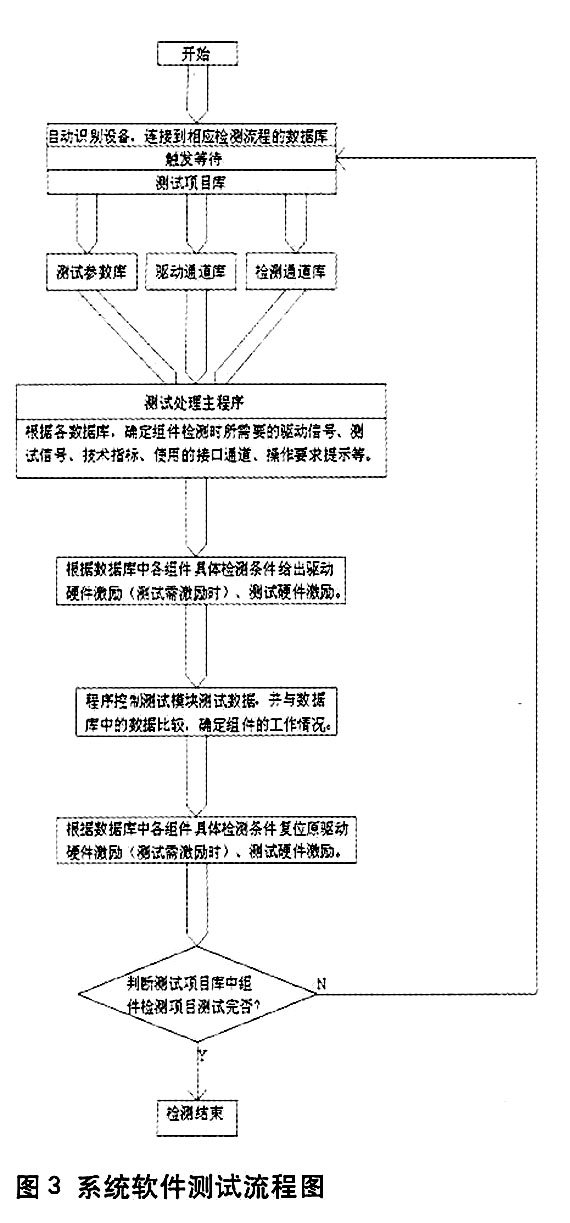
計算機控制系統的軟件系統是在Win98環境下,運用Lab Windows/CVI工具軟件平臺開發的,全部程序用C語言編制而成。Lab Windows/CVI具有良好的圖形用戶界面開發工具,具有ANSI C編譯器和方便的調試環境。主程序框圖如圖4所示。
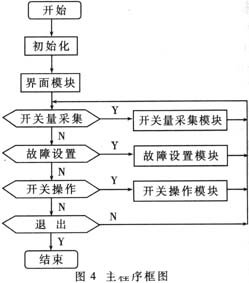
下面介紹各模塊的具體功能。
(1)初始化模塊:完成接口板的初始化、人機界面的初始化設置等功能;
(2)界面模塊:完成界面文件的編寫以及電氣主接線的繪制;
(3)開關量采集模塊:實現開關量的采集及顯示;
(4)故障設置模塊:實現在模擬線路上進行任意一種簡單故障的設置;
(5)開關操作模塊:實現兩側模擬斷路器的開關操作。
4 系統操作
短路故障控制器軟件系統的主窗口如圖5所示。
它由模擬線路電氣主接線示意圖、短路母線接線示意圖、功能菜單、信息欄和通訊狀態幾部分組成。在主窗中,操作者可以通過鼠標或鍵盤選擇其中任意一個功能選項,并通過下拉菜單選擇該功能選項中的任意一個功能條。
(1)退出:用于退出系統主窗口,并返回到主控系統。
(2)故障設置:此功能選項用于在系統主窗口中顯示的模擬線路上進行任意一種簡單故障的設置。其中,故障位置選擇參數用于操作者設置故障點。故障類型選擇參數用于選擇故障類型。故障時間選擇參數用于選擇故障持續時間。
(3)開關操作:用于實現對兩側模擬斷路器的跳合閘操作。操作者用鼠標滾動功能條,選擇任意功能選項,用鼠標單?quot;確定“,則開關操作設置窗口退出,彈出”密碼“窗口,確認密碼后,一種開關操作便被設置完畢。
(4)還原:此功能選項用于恢復故障設置和開關操作。當操作者完成一項故障設置或開關操作后,用鼠標單擊”還原“,則系統恢復初始狀態,等待進行下一項故障設置或開關操作。
(5)幫助:內含關于開關操作和故障設置的幫助信息。
(6)信息欄:用于顯示此次故障設置或開關操作的信息。
(7)通訊狀態:用于顯示計算機與可編程邏輯控制器(PLC)之間的通訊狀態。若通訊狀態良好,則在通訊狀態欄中顯示”正確接收“;若通訊有誤,則在通訊狀態欄中顯示通訊錯誤的種類。
另外,當模擬線路上有開關變位時,如完成了一次故障設置、開關操作或保護動作跳閘后,在系統主窗口電氣主接線圖的相應開關位置上將立即顯示出開關變位情況。
以上介紹了靜模系統控制部分的硬件、軟件組成和主要功能的設計與實現。硬件系統結構簡單、軟件系統運用 Lab Windows/CVI工具軟件開發,具有良好的圖形用戶界面,操作簡單靈活,修改參數方便,對提高靜模系統的實驗水平和教學效果有著十分重要的作用。文中提出的設計方案已于山東電力科學研究院靜態模擬實驗室成功實現,驗證了其可行性和有效性。
責任編輯:gt
-
計算機
+關注
關注
19文章
7515瀏覽量
88177 -
工控機
+關注
關注
10文章
1746瀏覽量
50623 -
數據采集
+關注
關注
39文章
6152瀏覽量
113754
發布評論請先 登錄
相關推薦
支持過程級動態軟硬件劃分的RSoC設計與實現
基于Lab Windows/CVI的壓力測量控制系統的設計
單片機測控系統的軟硬件平臺技術
基于Lab Windows/CVI的激光聲遙感系統顯控軟件設
基于FPGA的軟硬件協同測試設計影響因素分析與設計實現
工控機的配置太低,能否從硬件上升級
工控機的技術要求 工控機的系統有哪些

嵌入式工控機與傳統工控機的區別
研華工控機用什么系統?Windows與Linux操作系統的較量





 工商網監
工商網監
評論