") 伺服驅(qū)動器控制模式的接線及其注意事項(xiàng)
伺服驅(qū)動器控制模式的接線及其注意事項(xiàng)
我們在平時(shí)控制伺服電機(jī)的時(shí)候,經(jīng)常用到的控制模式就是三種模式分別是速度控制模式、位置控制模式、轉(zhuǎn)矩控制模式。現(xiàn)以三菱的伺服驅(qū)動器為例,下面分別了解一下每個(gè)模式的控制接線及其注意事項(xiàng)。
一、速度控制模式
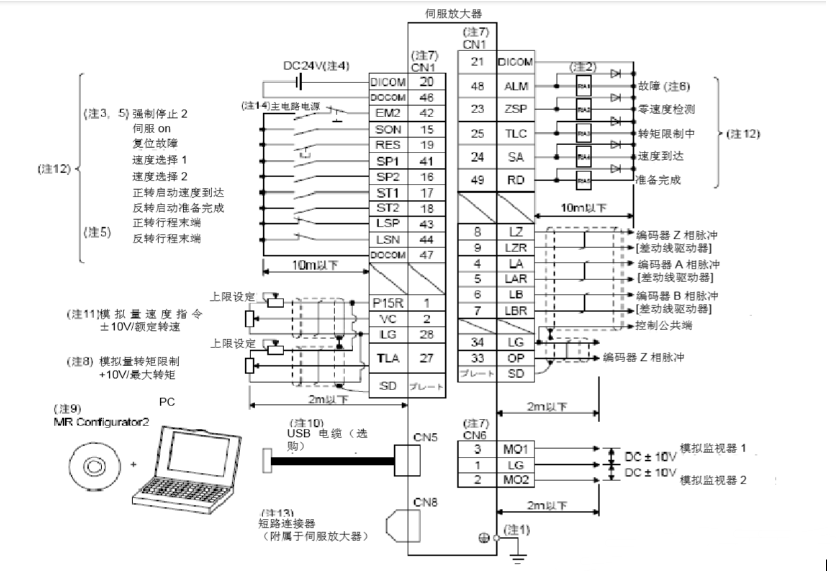
注1.為了防止觸電,請務(wù)必將伺服放大器的保護(hù)接地(PE)端子(帶記號的端子)連接到控制柜的保護(hù)接地(PE)上。
2.請正確連接二極管方向。連接錯(cuò)誤,可能會出現(xiàn)伺服放大器發(fā)生故障不能輸出信號,EM2(強(qiáng)制停止2)等的保護(hù)電路不能動作的情況。
3.運(yùn)行時(shí),請務(wù)必將EM2(強(qiáng)制停止2)信號保持ON狀態(tài)。(B接點(diǎn))
4.請從外部供給接口用DC24V±10%500mA電源。500mA是使用全部輸出信號時(shí)的值。通過減少輸入輸出點(diǎn)數(shù)能夠降低電流容量。請參考3.9.2項(xiàng)(1)記載的接口需要的電流。
5.運(yùn)行時(shí)請務(wù)必將EM2(強(qiáng)制停止2)、LSP(正轉(zhuǎn)行程末端)以及LSN(反正行程末端)ON。(B接點(diǎn))
6.ALM(故障)在未發(fā)生報(bào)警的正常情況下ON。
7.同樣名稱的信號在伺服放大器內(nèi)部是聯(lián)通的。
8.在[Pr.PD03]~[Pr.PD22]設(shè)置能夠使用TL(外部轉(zhuǎn)矩限制選擇)時(shí),即可使用TLA。
9.請使用SW1DNC-MRC2-E。
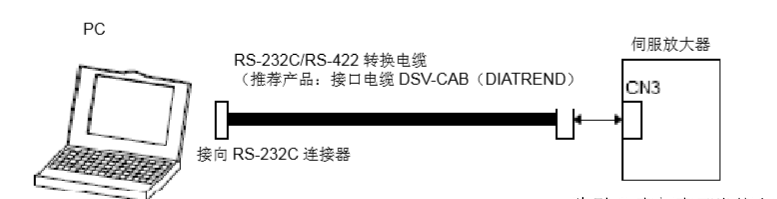
10.使用CN3連接器的RS-422通信(計(jì)劃應(yīng)用)能夠和個(gè)人電腦連接。但是,USB通信功能(CN5連接器)和RS-422通信功能(CN3連接器)是互斥的。不能同時(shí)使用。
11.輸入負(fù)電壓時(shí),請使用外部電源。
12.漏型輸入輸出接口的情況。
13.不使用STO功能時(shí),請?jiān)谒欧糯笃魃习惭b附屬的短路連接器。
14.為了防止伺服電機(jī)出現(xiàn)預(yù)期以外的再啟動,在創(chuàng)建電路時(shí),應(yīng)設(shè)置成主電路電源OFF時(shí)EM2同時(shí)OFF。
二、位置控制模式

注1.為了防止觸電,請務(wù)必將伺服放大器的保護(hù)接地(PE)端子(帶記號的端子)連接到控制柜的保護(hù)接地(PE)上。
2.請正確連接二極管方向。連接錯(cuò)誤,可能會出現(xiàn)伺服放大器發(fā)生故障不能輸出信號,EM2(強(qiáng)制停止2)等的保護(hù)電路不能動作的情況。
3.運(yùn)行時(shí),請務(wù)必將EM2(強(qiáng)制停止2)信號保持ON狀態(tài)。(B接點(diǎn))
4.請從外部提供接口用DC24V±10%500mA電源。500mA是使用全部輸出信號時(shí)的值。通過減少輸入輸出點(diǎn)數(shù)能夠降低電流容量。請參考3.9.2項(xiàng)(1)記載的接口需要的電流。
5.運(yùn)行時(shí)請務(wù)必使EM2(強(qiáng)制停止2)、LSP(正轉(zhuǎn)行程末端)以及LSN(反正行程末端)保持ON狀態(tài)。(B接點(diǎn))
6.ALM(故障)在沒發(fā)生報(bào)警的正常情況下ON。OFF(報(bào)警發(fā)生)時(shí),通過順控程序停止可編程控制信號。
7.同樣名稱的信號在伺服放大器內(nèi)部是聯(lián)通的。
8.指令脈沖串輸入采用差動驅(qū)動方式的情況。采用集電極開路輸入方式時(shí)在2m以下。
9.請使用SW1DNC-MRC2-E。
10.使用CN3連接器的RS-422通信(計(jì)劃應(yīng)用)能夠和個(gè)人電腦連接。但是,USB通信功能(CN5連接器)和RS-422通信功能(CN3連接器)是互斥的。不能同時(shí)使用。
11.QD75D不需要本連接。但是通過使用的定位模塊,為了達(dá)到抗干擾能力,推薦將伺服放大器的LG和控制公共端間進(jìn)行連接。
12.漏型輸入輸出接口的情況。源型輸入輸出接口。
13.不使用STO功能時(shí),請?jiān)谒欧糯笃魃习惭b短路連接器附件。
14.為了防止伺服電機(jī)出現(xiàn)預(yù)期以外的再啟動,在創(chuàng)建電路時(shí),應(yīng)設(shè)置成主電路電源OFF時(shí)EM2同時(shí)OFF。
三、轉(zhuǎn)矩控制模式
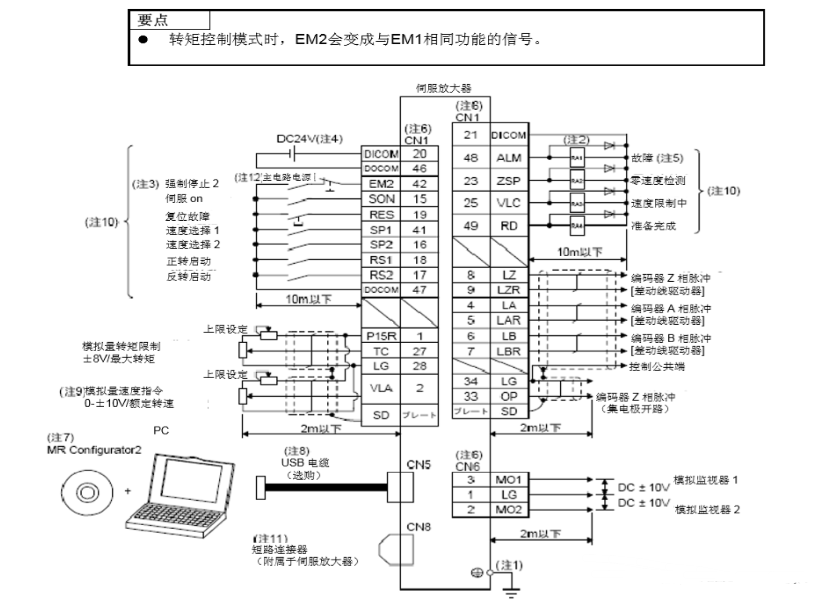
注1.為了防止觸電,請務(wù)必將伺服放大器的保護(hù)接地(PE)端子(帶記號的端子)連接到控制柜的保護(hù)接地(PE)上。
2.請正確連接二極管方向。連接錯(cuò)誤,可能會出現(xiàn)伺服放大器發(fā)生故障不能輸出信號,EM2(強(qiáng)制停止2)等的保護(hù)電路不能動作的情況。
3.運(yùn)行時(shí),請務(wù)必將EM2(強(qiáng)制停止2)信號保持ON狀態(tài)。(B接點(diǎn))
4.請從外部供給接口用的DC24V±10%500mA電源。500mA是使用全部輸出信號時(shí)的值。通過減少輸入輸出點(diǎn)數(shù)能夠降低電流容量。請參考3.9.2項(xiàng)(1)記載的接口需要的電流。
5.ALM(故障)在沒發(fā)生報(bào)警的正常情況下ON。
6.同樣名稱的信號在伺服放大器內(nèi)部是聯(lián)通的。
7.請使用SW1DNC-MRC2-J。
8.使用CN3連接器的RS-422通信(計(jì)劃應(yīng)用)能夠和個(gè)人電腦連接。但是,USB通信功能(CN5連接器)和RS-422通信功能(CN3連接器)是互斥的。不能同時(shí)使用。
9.輸入負(fù)電壓時(shí),請使用外部電源。
10.漏型輸入輸出接口的情況。
11.不使用STO功能時(shí),在伺服放大器上安裝附屬的短路連接器。
12.為了防止伺服電機(jī)出現(xiàn)預(yù)期以外的再啟動,在創(chuàng)建電路時(shí),應(yīng)設(shè)置成主電路電源OFF時(shí)EM2同時(shí)OFF。
責(zé)任編輯人:CC
-
驅(qū)動器
+關(guān)注
關(guān)注
53文章
8263瀏覽量
146677 -
控制模式
+關(guān)注
關(guān)注
0文章
25瀏覽量
8386 -
伺服驅(qū)動器
+關(guān)注
關(guān)注
22文章
488瀏覽量
31688
發(fā)布評論請先 登錄
相關(guān)推薦
數(shù)控車床銑床中應(yīng)用伺服電機(jī)的注意事項(xiàng)是什么
使用A4988步進(jìn)電機(jī)驅(qū)動器有哪些注意事項(xiàng)
伺服驅(qū)動器接地要注意哪些事項(xiàng)八大接地注意事項(xiàng)介紹
別換錯(cuò)了LED驅(qū)動器!這三個(gè)注意事項(xiàng)不要忘
COFT控制模式的Buck LED驅(qū)動芯片中 COFF的配置和注意事項(xiàng)

FAN7085 高邊柵極驅(qū)動器 - 內(nèi)部充電路徑設(shè)計(jì)注意事項(xiàng)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論