 高速CAN、容錯CAN、LIN總線的區別是什么
高速CAN、容錯CAN、LIN總線的區別是什么
花點時間看了一些關于LIN總線基礎的內容,把其中的關鍵點提取了出來,在這里分享給大家。在這里你可能要問“不都有CAN總線了嗎?這個LIN總線又是從哪里來的?”其實理由很簡單,就是CAN總線太貴啦!處處都用CAN總線的話,那整車的總線架構成本將會變得很高!在一些比如車身電子配件的地方(如車窗、后視鏡、大燈、車鎖等),我們不需要報文像CAN總線上傳輸的那樣“高速”!各大廠商一拍腦門就研究了這個LIN總線!
本文關注點:有了CAN為什么還會有LIN,CAN和LIN的區別,LIN的優勢在哪?
1. 什么是LIN總線?
LIN(Local Interconnect Network)總線是基于UART/SCI(通用異步收發器/串行接口)的低成本串行通訊協議。其目標定位于車身網絡模塊節點間的低端通信,主要用于智能傳感器和執行器的串行通信,而這正是CAN總線的帶寬和功能所不要求的部分。
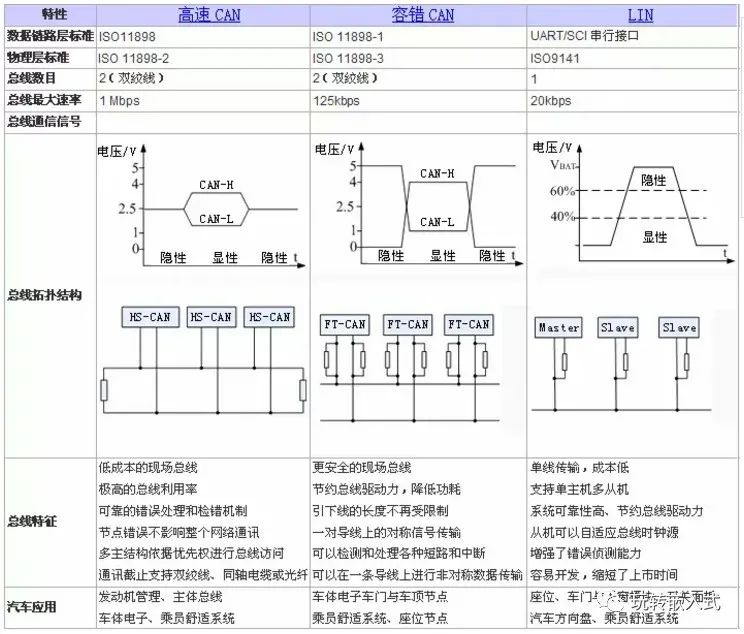
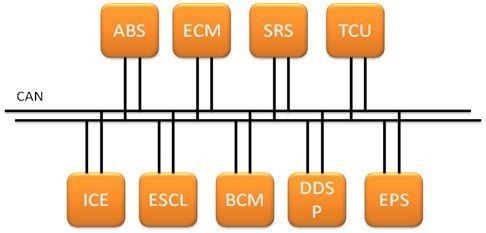
2. CAN/LIN總線區別
由于LIN網絡在汽車中一般不獨立存在,通常會與上層CAN網絡相連,形成CAN-LIN網關節點。

2.1.LIN總線的主從關系
LIN總線采用的是單線傳輸形式,應用了單主機多從機(有無主動上報的支持?)的概念,總線電平一般為12V,傳輸速率最高限制為20kbps。由于物理層的限制,一個LIN網絡最多可以連接16個節點。
總線任務負責:
調度總線上幀的傳輸次序
監測數據,處理錯誤
作為標準時鐘參考(不是異步通信?)
接收從機節點發出的總線喚醒命令
從機任務不能直接向總線發送數據,需要接受到主節點發送的幀頭后,根據幀頭所包含的信息來判斷:
發送應答
接收應答
既不接收也不應答
LIN的特點
網絡由一個主節點與若干個從節點構成
使用LIN總線可以大幅度削減成本(CAN和Lin都需要收發器,但是Lin屬于單線制在線束上節省)
傳輸具有確定性,傳播時間可以提前計算
LIN具有可預測的EMC(電磁兼容性)性能,為了限制EMC的強度,LIN協議規定最大傳輸速率為20kbps
LIN總線提供信號的配置、處理、識別和診斷功能(這些都是UART不具備的,可LIN是怎么實現的呢?)
3.LIN報文幀結構
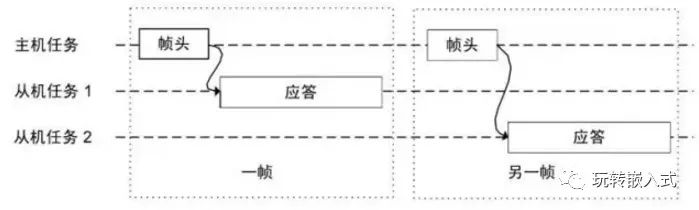
LIN報文幀包括幀頭(hearder)與應答(response)兩部分。主機負責發送至幀頭;從機負責接收幀頭并作出解析,然后決定是發送應答,還是接收應答或不回復。
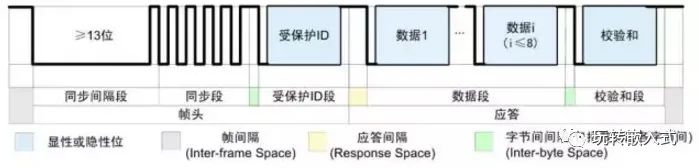
(主機)幀頭結構包括同步間隔段、同步段、PID段(受保護ID)段,應答部分包括數據段與效驗和段。其中值“0”為顯性電平、“1”為隱性電平,這點與CAN總線相類似玩轉嵌入式micropoint8。在總線上實行“線-與”:當總線有至少一個節點發送顯性電平時,總線呈現顯性電平;所有節點均發送隱性電平或者不發送信息時,總線呈隱性電平,即顯性電平起著主導作用。
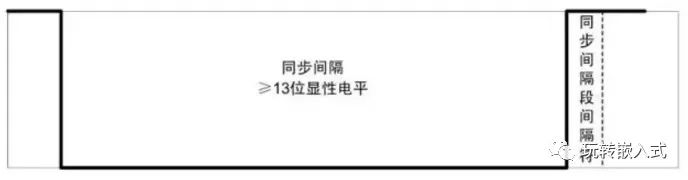
3.1.1.同步間隔段
同步間隔段至少是由13位的顯性電平組成,由于幀中的所有間隙或者總線空閑時總線均保持隱性電平狀態。所以同步間隔段可以標志一個幀的開始。其中同步間隔段的間隔符至少為1位隱性電平。
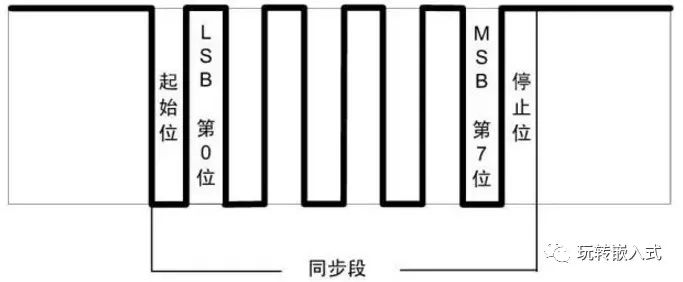
3.1.2.同步段
LIN同步以下降沿為判斷標志,采用字節0x55(01010101b)進行同步。在從機節點上可以不采用高精度的時鐘,由此帶來的偏差,需要通過同步段來進行調整。
3.1.3.PID段
受保護的ID的前6位叫做幀ID,加上兩個奇偶效驗碼后稱作受保護的ID。幀ID的取值范圍為0x00~0x3f總共64個,幀ID標識了幀的類別和目的地。從機任務會根據幀頭ID作出反應(接收/發送/忽略應答)。其中P0與P1效驗如下:
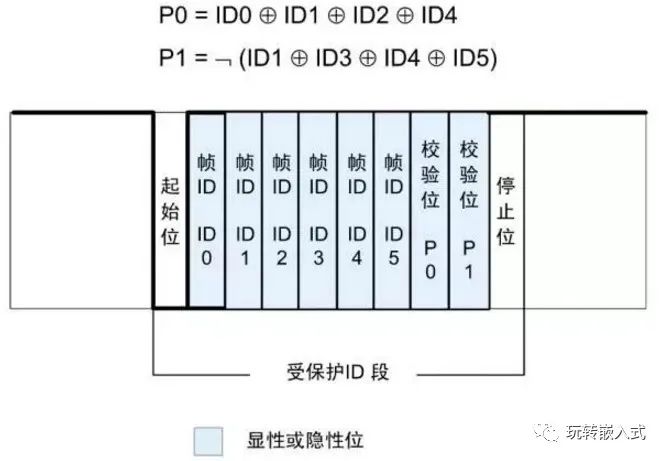
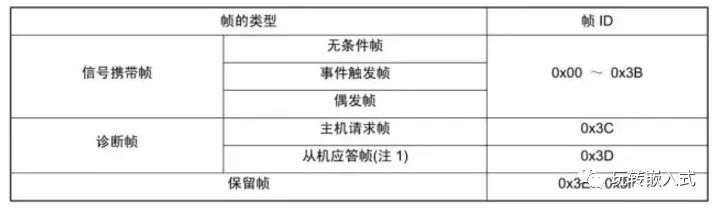
LIN總線根據幀ID號的不同,把報文分為信號攜帶幀、診斷幀、保留幀。
PS:從機應答幀是一個完整的幀,與(主節點)幀結構中的“應答”不同!
3.1.4.數據段
數據段可以包含1-8個字節,其中包含有兩種數據類型,信號(singal)和診斷消息(diagnostic messages)。信號由信號攜帶幀傳遞,診斷消息由診斷幀傳遞。
協議中并沒有規定哪一部分顯示數據長度碼的信息(這點與CAN總線不同),數據的內容與長度均是由系統設計者根據幀ID事先約定好的。
總線上的數據是以廣播形式發出,任何節點均可以收到,但并非對每個節點有用(與CAN相同)。具體到發布與接聽是由哪個節點進行完成這個取決于應用層的軟件配置,一般情況下,對于一個幀中的應答,總線上只存在一個發布節點,否則就會出現錯誤。事件觸發幀例外,可能出現0,1,多個發布節點。
3.1.5.效驗和段
效驗和段是為了對幀傳輸內容進行效驗。效驗分為標準型效驗與增強型效驗。采用標準型還是增強型是由主機節點管理,發布節點和收聽節點根據幀ID來判斷采用哪種效驗和。

4.LIN總線波形
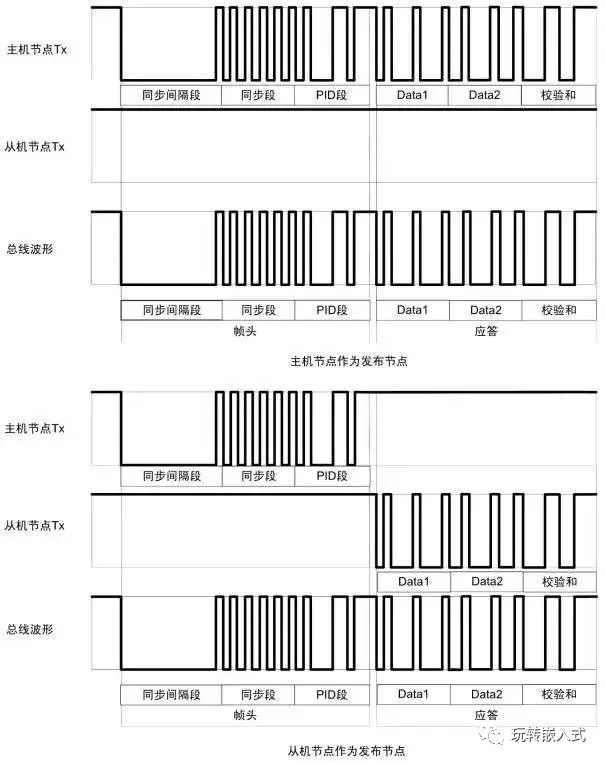
5.LIN總線的通訊
上圖展示的是LIN總線的通訊方式,可以看出無論什么時候幀頭總是由主機節點發布,當主機節點想發布數據時,整個幀全部由主機節點發送。當從機節點想發布數據時,幀頭部分由主機節點發布,應答部分由從機節點發布(主機怎么知道從機節點想發布數據,那肯定是主機節點無數據可發,故只發了幀頭?),這樣其余節點都能收到一個完整的報文幀。可以很直接的觀察到,LIN總線的通訊都是由主機節點發起的玩轉嵌入式micropoint8,只要合理的規定要每個節點的配置,這樣就不會存在總線沖突的情況(事件觸發幀沖突時采用采用沖突解決進度表)。
幀類型
5.1.無條件幀
無條件幀是具有單一發布節點的,無論信號是否發生變化,幀頭均會被無條件應答的幀。
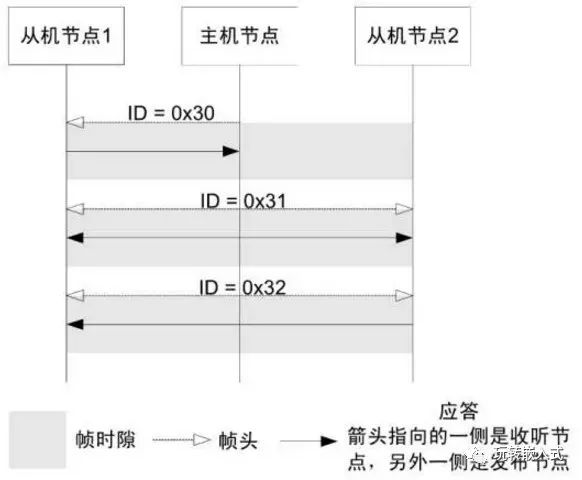
如上圖中幀ID=0x30應答部分的發布節點為從機節點1,收聽節點為主機節點,應用在從機節點向主機節點報告自身狀態;幀ID=0x31中,應答部分為主機節點,收聽部分為從機節點,應用在主機節點向從機節點發送消息;幀ID=0x32中應答部分的發送節點為從機節點2,收聽節點為從機節點1,應用與從機節點之間的通信。
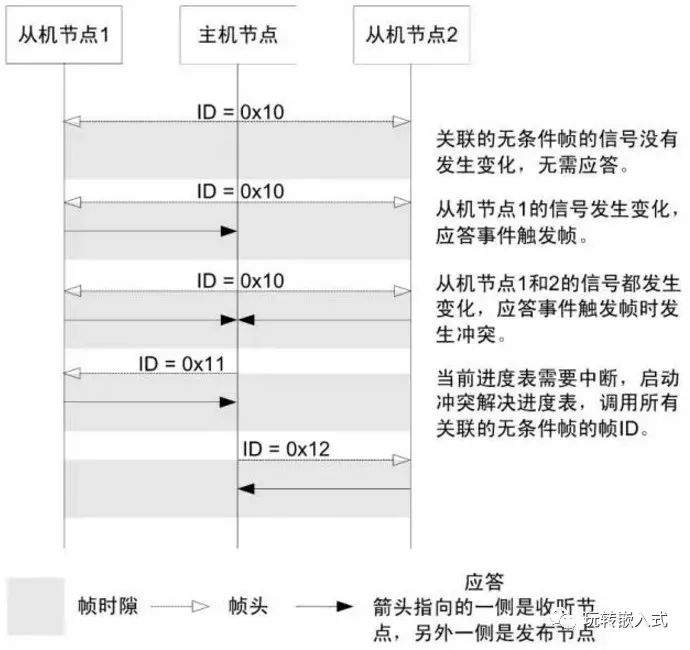
5.2.事件觸發幀
事件觸發幀是主機節點在一個幀間隙中查詢各從機節點的信號是否發生變化時使用的幀。當存在多個發布節點時,通過沖突解決進度表來解決沖突。
當從機節點信號發生變化的頻率較低的時候,主機任務一次次地查詢各個節點信息會占用一定的帶寬。為了減小帶寬的占用,引入了事件觸發幀的概念。其主要原理就是:當從機節點信息狀態沒有發生變化的時候,從機節點可以不應答主機發出的幀頭;當有多個節點信息同時發生變化的時候,同時應答事件觸發幀頭會造成總線的沖突。當主機節點檢測到沖突時,便會查詢沖突解決進度表來依次向各個節點發送無條件幀(無條件幀只有能1個節點應答)來確定從機節點的信息狀態。
與事件觸發幀關聯的多個無條件幀需要滿足以下5個條件:
數據段所包含的數據字節數等長 使用相同的效驗與類型數據段的第一個字節為該無條件幀的受保護ID,這樣才能夠知道應答是哪個關聯的無條件幀發送出來的 由不同的從機節點發布不能與時間觸發幀處于同一個進度表中。
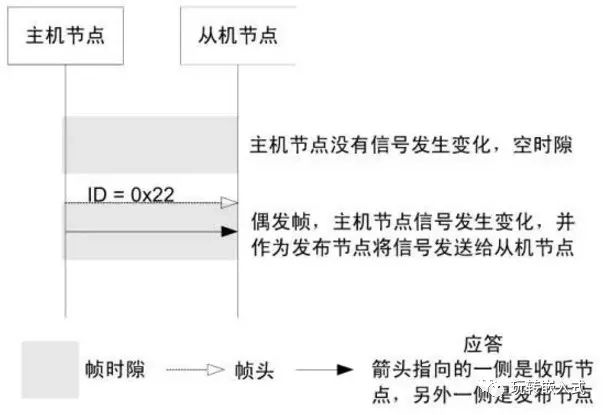
5.2.1.偶發幀
偶發幀是主機節點在同一幀時隙中當自身信號發生變化時向總線啟動發送的幀。當存在多個關聯的應答信號變化時,通過預先設定的的優先級來仲裁。與事件觸發幀類似,偶發幀也定義了一組無條件幀。規定偶發幀只有由主機節點發布。
偶發幀的傳輸可能出現三種情況:
當關聯的無條件幀沒有信號發生變化,這是主機連幀頭也不需要發送。
當關聯的一個無條件幀信號發生變化則發送該幀。
當有多個無條件幀發生信號變化時,則按照事先規定要的優先級依次發送。
5.2.2.診斷幀
診斷幀包括主機請求幀和從機應答幀,主要用于配置、識別和診斷。主機請求幀ID=0x3c,應答部分的發布節點為主機節點;從機應答幀ID=0x3d,應答部分的發布節點為從機節點。數據段規定為8個字節,一律采用標準效驗和。
5.2.3.保留幀
保留幀的ID=0x3e與0x3f,為將來擴張需求用。
5.3.進度表
進度表是幀的調度表,規定了總線上幀的傳輸次序以及傳輸時間。進度表位于主機節點,主機任務根據應用程需要進行調度。進度表可以有多個,一般情況下,輪到某個進度表執行的時候,從該進度表的入口處開始執行,到進度表的最后一個幀時,如果沒有新的進度表啟動則返回到當前進度表的第一個幀開始執行玩轉嵌入式micropoint8,也有可能在執行到某個進度表時發生中斷,跳到另一個進度表后再返回,如事件觸發幀就是一個典型的例子。
6.狀態機的實現
6.1.主機狀態機
6.2.從機狀態機
從機任務負責發布或者接聽幀的應答狀態,包括連兩個狀態機:同步間隔段與同步段檢查器、幀處理器。
6.3.從機任務狀態機
責任編輯:xj
原文標題:什么是LIN總線?高速CAN、容錯CAN、LIN總線有什么區別?
文章出處:【微信公眾號:嵌入式ARM】歡迎添加關注!文章轉載請注明出處。
-
CAN
+關注
關注
57文章
2754瀏覽量
463718 -
總線
+關注
關注
10文章
2881瀏覽量
88090 -
LIN
+關注
關注
4文章
216瀏覽量
40284
原文標題:什么是LIN總線?高速CAN、容錯CAN、LIN總線有什么區別?
文章出處:【微信號:gh_c472c2199c88,微信公眾號:嵌入式微處理器】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
CAN總線技術的未來趨勢
CAN總線與LIN總線的區別



CAN FD與傳統CAN的區別是什么

CAN總線和EtherCAT的區別


高速CAN總線和低速CAN總線的區別
CAN控制器、CAN收發器、CAN驅動器的區別是什么?





 工商網監
工商網監
評論