") YOLO的另一選擇,手機(jī)端97FPS的Anchor-Free目標(biāo)檢測(cè)模型NanoDet
YOLO的另一選擇,手機(jī)端97FPS的Anchor-Free目標(biāo)檢測(cè)模型NanoDet
文章轉(zhuǎn)載于:知乎
作者:RangiLyu
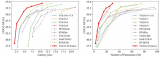
上來(lái)先貼一下性能對(duì)比:
華為P30上用NCNN移植跑benchmark,每幀僅需10.23毫秒,比yolov4-tiny快3倍,參數(shù)量小6倍,COCO mAP(0.5:0.95)能夠達(dá)到20.6 。而且模型權(quán)重文件只有1.8mb,對(duì)比動(dòng)輒數(shù)十兆的模型,可以說(shuō)是相當(dāng)友好了~
Android Demo
項(xiàng)目地址(提供訓(xùn)練代碼到安卓部署一站式解決方案):
前言
深度學(xué)習(xí)目標(biāo)檢測(cè)已經(jīng)發(fā)展了許多年,從Two-stage到One-stage,從Anchor-base到Anchor-free,再到今年的用Transformer做目標(biāo)檢測(cè),各種方法百花齊放,但是在移動(dòng)端目標(biāo)檢測(cè)算法上,yolo系列和SSD等Anchor-base的模型一直占據(jù)著主導(dǎo)地位。這個(gè)項(xiàng)目的主要目的是希望能夠開源一個(gè)移動(dòng)端實(shí)時(shí)的Anchor-free檢測(cè)模型,能夠提供不亞于yolo系列的性能,而且同樣方便訓(xùn)練和移植。
其實(shí)從去年大量anchor-free的論文發(fā)表之后,我就一直想把a(bǔ)nchor free的模型移植到移動(dòng)端或者是嵌入式設(shè)備上。當(dāng)時(shí)嘗試過把FCOS輕量化的實(shí)驗(yàn),奈何效果并不如mobilenet+yolov3,也就暫時(shí)擱置了。分析下來(lái),主要還是因?yàn)镕COS的centerness分支在輕量級(jí)的模型上很難收斂,之后發(fā)表的一些在FCOS上面進(jìn)行改進(jìn)的論文也都沒有解決這一問題。
直到今年年中的時(shí)候刷arxiv突然刷到了
老師的論文Generalized Focal Loss: Learning Qualified and Distributed Bounding Boxes for Dense Object Detection,論文中提出的GFocalLoss完美去掉了FCOS系列的Centerness分支,而且在coco數(shù)據(jù)集上漲點(diǎn)顯著,這么好的文章怎么能不點(diǎn)贊呢?GFL的出現(xiàn)不僅去掉了難以訓(xùn)練的Centerness,而且還省去了這一分支上的大量卷積,減少了檢測(cè)頭的計(jì)算開銷,非常適合移動(dòng)端的輕量化部署。
貼一下李翔老師關(guān)于GFocal Loss的解讀:
李翔:大白話 Generalized Focal Loss?zhuanlan.zhihu.com
檢測(cè)頭輕量化
在找到了合適的損失函數(shù)之后,接下來(lái)的關(guān)鍵就是如何使其在輕量化模型上發(fā)揮作用了。首先需要對(duì)移動(dòng)端進(jìn)行優(yōu)化的就是檢測(cè)頭:FCOS系列使用了共享權(quán)重的檢測(cè)頭,即對(duì)FPN出來(lái)的多尺度Feature Map使用同一組卷積預(yù)測(cè)檢測(cè)框,然后每一層使用一個(gè)可學(xué)習(xí)的Scale值作為系數(shù),對(duì)預(yù)測(cè)出來(lái)的框進(jìn)行縮放。
FCOS模型架構(gòu)
這么做的好處是能夠?qū)z測(cè)頭的參數(shù)量降低為不共享權(quán)重狀態(tài)下的1/5。這對(duì)于光是檢測(cè)頭就擁有數(shù)百通道的卷積的大模型來(lái)說(shuō)非常有用,但是對(duì)于輕量化模型來(lái)說(shuō),共享權(quán)重檢測(cè)頭并沒有很大的意義。由于移動(dòng)端模型推理由CPU進(jìn)行計(jì)算,共享權(quán)重并不會(huì)對(duì)推理過程進(jìn)行加速,而且在檢測(cè)頭非常輕量的情況下,共享權(quán)重使得其檢測(cè)能力進(jìn)一步下降,因此還是選擇每一層特征使用一組卷積比較合適。
同時(shí),F(xiàn)COS系列在檢測(cè)頭上使用了Group Normalization作為歸一化的方式,GN對(duì)比BN有很多好處,但是卻有一個(gè)缺點(diǎn):BN在推理時(shí)能夠?qū)⑵錃w一化的參數(shù)直接融合進(jìn)卷積中,可以省去這一步計(jì)算,而GN則不行。為了能夠節(jié)省下歸一化操作的時(shí)間,我選擇將GN替換為BN。
FCOS的檢測(cè)頭使用了4個(gè)256通道的卷積作為一個(gè)分支,也就是說(shuō)在邊框回歸和分類兩個(gè)分支上一共有8個(gè)c=256的卷積,計(jì)算量非常大。為了將其輕量化,我首先選擇使用深度可分離卷積替換普通卷積,并且將卷積堆疊的數(shù)量從4個(gè)減少為2組。在通道數(shù)上,將256維壓縮至96維,之所以選擇96,是因?yàn)樾枰獙⑼ǖ罃?shù)保持為8或16的倍數(shù),這樣能夠享受到大部分推理框架的并行加速。最后,借鑒了yolo系列的做法,將邊框回歸和分類使用同一組卷積進(jìn)行計(jì)算,然后split成兩份。下圖就是最終得到的輕量化檢測(cè)頭的結(jié)構(gòu),非常的小巧:
NanoDet檢測(cè)頭
FPN層改進(jìn)
目前針對(duì)FPN的改進(jìn)有許多,如EfficientDet使用了BiFPN,yolo v4和yolo v5使用了PAN,除此之外還有BalancedFPN等等。BiFPN雖然性能強(qiáng)大,但是堆疊的特征融合操作勢(shì)必會(huì)帶來(lái)運(yùn)行速度的降低,而PAN只有自上而下和自下而上兩條通路,非常的簡(jiǎn)潔,是輕量級(jí)模型特征融合的好選擇。
原版的PAN和yolo中的PAN,都使用了stride=2的卷積進(jìn)行大尺度Feature Map到小尺度的縮放。我為了輕量化的原則,選擇完全去掉PAN中的所有卷積,只保留從骨干網(wǎng)絡(luò)特征提取后的1x1卷積來(lái)進(jìn)行特征通道維度的對(duì)齊,上采樣和下采樣均使用插值來(lái)完成。與yolo使用的concatenate操作不同,我選擇將多尺度的Feature Map直接相加,使得整個(gè)特征融合模塊的計(jì)算量變得非常非常小。
最終的極小版PAN的結(jié)構(gòu)也是非常簡(jiǎn)單:
超輕量的PAN
Backbone的選擇
原本有考慮過自己魔改一個(gè)輕量級(jí)的backbone出來(lái),但是最后評(píng)估了一下感覺工作量太大了(在家訓(xùn)練模型電費(fèi)太貴),就打算選擇使用現(xiàn)有的一些輕量級(jí)骨干網(wǎng)絡(luò)。最開始的選擇有MobileNet系列,GhostNet,ShuffleNet,還有最近的EfficientNet。在評(píng)估了參數(shù)量、計(jì)算量以及權(quán)重大小之后,還是選擇了ShuffleNetV2作為骨干網(wǎng)絡(luò),因?yàn)樗沁@些模型里面在相似精度下體積最小的,而且對(duì)移動(dòng)端CPU推理也比較友好。
最終我選擇使用ShuffleNetV2 1.0x作為backbone,去掉了最后一層卷積,并且抽取8、16、32倍下采樣的特征輸入進(jìn)PAN做多尺度的特征融合。整個(gè)骨干模型使用了Torchvision提供的代碼,能夠直接加載Torchvision上提供的imagenet預(yù)訓(xùn)練權(quán)重,對(duì)加快模型收斂有很大的幫助。順便一提,最近有些論文指出使用分類的預(yù)訓(xùn)練權(quán)重初始化模型對(duì)檢測(cè)任務(wù)的效果不如隨機(jī)初始化的好,不過這要付出訓(xùn)練更多步數(shù)的代價(jià),我還沒有測(cè)試過,歡迎大家嘗試~
NanoDet整體模型結(jié)構(gòu)
模型性能
在經(jīng)過對(duì)one-stage檢測(cè)模型三大模塊(Head、Neck、Backbone)都進(jìn)行輕量化之后,得到了目前開源的NanoDet-m模型,在320x320輸入分辨率的情況下,整個(gè)模型的Flops只有0.72B,而yolov4-tiny則有6.96B,小了將近十倍!模型的參數(shù)量也只有0.95M,權(quán)重文件在使用ncnn optimize進(jìn)行16位存儲(chǔ)之后,只有1.8mb,非常適合在移動(dòng)端部署,能夠有效減少APP體積,同時(shí)也對(duì)更低端的嵌入式設(shè)備更加友好。
盡管模型非常的輕量,但是性能卻依舊強(qiáng)勁。對(duì)于小模型,往往選擇使用AP50這種比較寬容的評(píng)價(jià)指標(biāo)進(jìn)行對(duì)比,這里我選擇用更嚴(yán)格一點(diǎn)的COCO mAP(0.5:0.95)作為評(píng)估指標(biāo),同時(shí)兼顧檢測(cè)和定位的精度。在COCO val 5000張圖片上測(cè)試,并沒有使用Testing-Time-Augmentation的情況下,320分辨率輸入能夠達(dá)到20.6的mAP,比tiny-yolov3高4分,只比yolov4-tiny低1個(gè)百分點(diǎn),而將輸入分辨率與yolo保持一致,都使用416輸入的情況下,得分持平。
最后用ncnn部署到手機(jī)上之后跑了一下benchmark,模型前向計(jì)算時(shí)間只要10毫秒左右,對(duì)比yolov3和v4 tiny,均在30毫秒的量級(jí)。在安卓攝像頭demo app上,算上圖片預(yù)處理,檢測(cè)框后處理以及繪制檢測(cè)框的時(shí)間,也能輕松跑到40+FPS~。(關(guān)于模型從pytorch到安卓的部署,以及如何用C++實(shí)現(xiàn)GFL檢測(cè)框的后處理,我會(huì)再專門發(fā)一遍文章詳細(xì)介紹)
ncnn 安卓benchmark對(duì)比
總結(jié)
NanoDet總體而言沒有特別多的創(chuàng)新點(diǎn),是一個(gè)純工程化的項(xiàng)目,主要的工作就是將目前學(xué)術(shù)界的一些優(yōu)秀論文,落地到移動(dòng)端的輕量級(jí)模型上。最后通過這些論文的組合,得到了一個(gè)兼顧精度、速度和體積的檢測(cè)模型。
為了讓大家能夠快速使用NanoDet,方便訓(xùn)練和部署,我已經(jīng)把Pytorch的訓(xùn)練代碼、基于NCNN的Linux和windowsC++部署代碼以及Android攝像頭Demo全部開源,同時(shí)在Readme中也包含了非常詳細(xì)的教程,歡迎大家使用,歡迎提issue~
順便提一句,NanoDet訓(xùn)練并沒有用到很多數(shù)據(jù)增強(qiáng)的技巧,模型結(jié)構(gòu)也非常簡(jiǎn)單,也就是說(shuō)mAP應(yīng)該還有很大的提升空間,如果有小伙伴愿意魔改一下再漲幾個(gè)點(diǎn)那就再好不過了(嘻嘻)。
最后的最后,Github求Star啊!!
/=======================================================
11月25日更新:
大家都太熱情了!NanoDet僅開源三天Github就已經(jīng)突破900star,并且登上了Github趨勢(shì)榜!
感謝各位大佬的支持,特別感謝李翔老師的論文給NanoDet模型的啟發(fā),以及ncnn作者nihui在項(xiàng)目初期的推廣~大家快去給ncnn和GFocalLoss點(diǎn)star啊!
Tencent/ncnn: ncnn is a high-performance neural network inference framework optimized for the mobile platform (github.com)?github.comimplus/GFocal: Generalized Focal Loss: Learning Qualified and Distributed Bounding Boxes for Dense Object Detection (github.com)?github.com
之前一直在ncnn群里面討論NanoDet,感覺不太合適,所以專門建了一個(gè)討論群:908606542 (進(jìn)群答案:煉丹) 歡迎大家來(lái)討論~
推薦閱讀
- AI編譯優(yōu)化--業(yè)務(wù)實(shí)踐
- 如何在OpenCV DNN模塊中添加Tengine后端?
更多Tengine相關(guān)內(nèi)容請(qǐng)關(guān)注Tengine-邊緣AI推理框架專欄。
審核編輯:符乾江
-
人工智能
+關(guān)注
關(guān)注
1792文章
47497瀏覽量
239214 -
深度學(xué)習(xí)
+關(guān)注
關(guān)注
73文章
5510瀏覽量
121338
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
AI模型部署邊緣設(shè)備的奇妙之旅:目標(biāo)檢測(cè)模型
使用英特爾AI PC為YOLO模型訓(xùn)練加速

助力AIoT應(yīng)用:在米爾FPGA開發(fā)板上實(shí)現(xiàn)Tiny YOLO V4
《DNK210使用指南 -CanMV版 V1.0》第四十二章 人臉口罩佩戴檢測(cè)實(shí)驗(yàn)
YOLOv10自定義目標(biāo)檢測(cè)之理論+實(shí)踐

《DNK210使用指南 -CanMV版 V1.0》第四十一章 YOLO2物體檢測(cè)實(shí)驗(yàn)
《DNK210使用指南 -CanMV版 V1.0》第四十章 YOLO2人手檢測(cè)實(shí)驗(yàn)
《DNK210使用指南 -CanMV版 V1.0》第三十九章 YOLO2人臉檢測(cè)實(shí)驗(yàn)
使用OpenVINO C# API部署YOLO-World實(shí)現(xiàn)實(shí)時(shí)開放詞匯對(duì)象檢測(cè)
目標(biāo)檢測(cè)與識(shí)別技術(shù)的關(guān)系是什么
慧視小目標(biāo)識(shí)別算法 解決目標(biāo)檢測(cè)中的老大難問題

使用esp-dl中的example量化我的YOLO模型時(shí),提示ValueError: current model is not supported by esp-dl錯(cuò)誤,為什么?
用OpenVINO C# API在intel平臺(tái)部署YOLOv10目標(biāo)檢測(cè)模型
OpenVINO? C# API部署YOLOv9目標(biāo)檢測(cè)和實(shí)例分割模型






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論