 康奈爾大學蜂群無人機在編隊飛行時動態可避開障礙物
康奈爾大學蜂群無人機在編隊飛行時動態可避開障礙物
國外DroneDJ網站12月17日報道,來自康奈爾大學(Cornell University )和arXiv實驗室的研究人員展示了他們最新的無人機項目,其可使蜂群無人機在編隊飛行時動態避開障礙物。
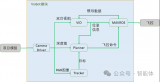
據介紹,該項目采用分布式異步(decentralized and asynchronous)系統解決方案。測試的這些無人機已經用一種特殊的避障技術改造過,可以在彼此的幫助下動態避開障礙物。每架無人機都配備了視覺傳感器,可以創建虛擬的地圖。所有的數據又被收集起來來創建一個大的地圖,每架無人機可以以此確定自己的飛行方向。
報道稱,該系統已經在處理能力非常低、無線連接也很差的條件下進行過測試,這使得它成為農村和沒有網絡連接的地區的一個很好的解決方案。只需三架無人機既可以用相當快的速度穿越森林而不會撞到樹。
該研究小組稱,該方案可以很容易地擴大到更大規模的無人機編隊上,目前他們已經測試了10架無人機編隊。空中的無人機越多,就越可以在更短的時間內收集到更多的數據,這非常適于執行測繪和搜索救援任務。
責任編輯:PSY
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
無人機
+關注
關注
230文章
10437瀏覽量
180440 -
障礙檢測
+關注
關注
0文章
2瀏覽量
5617 -
蜂群算法
+關注
關注
0文章
16瀏覽量
2569
發布評論請先 登錄
相關推薦
集性能與成本于一身的IMU,讓無人機飛行更穩定
無人機在進行任何形式的飛行時,必須了解空中平臺的方向、其運動的性質以及飛行方向。通常用于測量此運動的是IMU,IMU提供與無人機三個軸向的加速度和角速度數據,以及有關

無人機飛行仿真模擬訓練系統
智慧華盛恒輝無人機飛行仿真模擬訓練系統,也稱無人機仿真訓練模擬器,是一種集模擬訓練演練與無人機飛行控制數據模擬驗證于一體的仿真系統。 一、系
開源項目!用ESP8266 DIY會爬墻的無人機
有點神奇,作者表示,下面介紹的這個無人機就能做到!
一個基于NodeMCU飛行控制器和安卓應用控制的爬墻項目。完整的細節和解釋視頻。
我相信,你會愛上它。
玩無人機需要一個飛行控制器,
發表于 07-04 09:22

特信無人機反制系統:精準區分無人機與其他飛行物的關鍵技術解析
無人機反制系統在現代航空管理中扮演著至關重要的角色,其首要任務之一就是準確區分無人機與其他飛行物。這一功能的實現依賴于多種技術手段的綜合應用,確保系統能夠精確、高效地作出判斷。
首先,無
北極芯微dToF傳感器大規模量產交付無人機市場
當今,無人機技術已經廣泛滲透到各個產業領域,為我們帶來了前所未有的便捷和效率。無人機在飛行過程中需要實時感知障礙物和飛行高度,以確保安全、穩

分布式無人機蜂群的工作原理
蜂群中的無人機通過無線通信協議相互連接,實現實時信息交流和指令傳遞。它們可以共享任務目標、位置信息和傳感器數據,以便更好地協同工作。
發表于 03-14 10:35
?1252次閱讀
第四集 知語云智能科技無人機反制技術與應用--無人機的組成與工作原理
科技的視角,深入探討無人機的組成與工作原理,為您揭開無人機飛行的神秘面紗。
一、無人機的組成結構
無人機主要由機身、動力系統、飛控系統、傳感
發表于 03-12 11:28
第一集 知語科技無人機反制技術與應用--無人機的定義與分類
了解無人機反制技術與應用,為您揭開這一神秘領域的面紗。
一、無人機技術概述
1 無人機的定義與分類
無人機,即無人駕駛
發表于 03-12 10:42
知語云智能科技無人機防御系統:應對新興威脅的先鋒力量
的飛行軌跡和意圖,及時發出預警信息。
在應對無人機威脅方面,知語云智能科技的無人機防御系統采用了多種技術手段。一方面,系統可以通過無線電干擾技術,對目標無人機進行信號干擾,迫使其返航
發表于 02-26 16:35
無人機全景監測:空域管理的新革命
帶來了新的突破。
一、無人機全景監測技術概述
無人機全景監測技術結合了無人機飛行技術和高分辨率圖像處理技術,通過搭載在無人機上的高清攝像頭,
發表于 02-20 15:23
四旋翼無人機飛行原理【其利天下無人機方案開發】
無人機行業的近年蓬勃發展,宛如一片璀璨的新星匯聚成的輝煌星空。創新和科技的融合將無人機推向生活的前沿,成為引領時代的先鋒。這是一場風起云涌的科技巨變,為我們描繪出了一個嶄新而引人入勝的無人機時代。
下面我們針對生活中常見的四旋






 工商網監
工商網監
評論