 4D成像雷達是汽車發展最熱門的趨勢之一
4D成像雷達是汽車發展最熱門的趨勢之一
12月12日晚,特斯拉Model S突然叕失控,在北京航天橋附近一小區內上演“失控門”,以80km/h的速度鉆入居民樓半地下陽臺。埃隆?馬斯克總得想點辦法對付這些“看不見”的龐然大物吧?本文下面會提及他的辦法是什么。
龐大物體視而不見屢見不鮮
對雷達來說,汽車應用已來到一個令人興奮的時刻。當然,這里說的雷達主要是指3D毫米波成像雷達。2019年,由于在更多情況下都可使用,其安裝量同比增長了44%,在超短程方面侵蝕了激光雷達(LiDAR)和超聲波技術的市場。中國的車載毫米波雷達市場發展也在步入快車道。技術發展總是無止境的,一些廠商已開始發布新的汽車4D成像雷達,不過可以量產的產品鳳毛麟角,人們或許會問,4D能做的,現在的3D雷達和攝像頭不是已經能做了?比如坐艙監控感知等應用。殊不知,4D有4D的道理。我們先看看3D雷達和4D雷達有什么不同,再看看行業對市場發展的預期。
汽車雷達一路走來
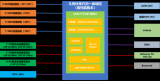
汽車雷達使用的半導體經過了幾代演繹,還在不斷發展。第一代產品采用GaAs芯片,直接安裝在電路板上,用導線連接起來。下一代是SiGe芯片,片上集成的功能更多。許多公司現在正在開發硅CMOS和SOI技術。許多公司使用40nm技術節點,但有些公司將其降低到28nm以下。小節點加上CMOS技術,可以在芯片內實現更高的功能集成。
目前,最新一代雷達芯片不僅集成了收發器和Chirp,還集成了微控制器和數字信號處理(DSP)單元。這為支持MIMO天線的單芯片雷達解決方案指明了方向。轉向硅技術也將更好地維持一條降低成本路線,特別是更適合量產。
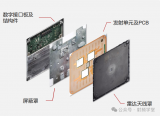
封裝和板技術也在發展。第一代器件由多個直接安裝在電路板上并通過引線鍵合連接的片芯組成。這些雷達模塊還有兩個獨立的電路板:一個是RF,另一個用于數字功能。隨著封裝的進步,出現了各種形式的晶圓級產品。電路板還進化為與由特殊低插入損耗材料(如陶瓷填充聚四氟乙烯或類似材料)組成的頂部RF層混合。在小型天線陣列足以滿足要求的情況下,封裝天線(AiP)設計開始采用,有些已被證明適合短程汽車應用。傳統雷達具有在二維空間進行測量的能力。2D雷達利用一個專用的旋轉天線監聽回波信號,能夠獲得兩個坐標并確定目標的位置。之后3D雷達出現了,它會像2D雷達一樣旋轉,但每次掃描旋轉后,天線的仰角會改變,以備下次探測。通過這種方式,3D雷達可以探測三個維度:方位角、仰角和速度。
3D雷達原理描述
4D成像雷達改變在哪里?
從原理上看,4D成像雷達與傳統雷達和LiDAR還是有很大不同的。從理論物理學角度來看,時間被認為是第四維度。當它應用于雷達時,將成為多普勒頻率,顯示一個物體是朝著自己移動還是向遠處移動。
有些人認為,4D成像雷達是一個錯誤的名稱和營銷策略,因為這些雷達不是真正的測繪時間,而是利用時間來了解3D環境;此外,現代偵察雷達已經具備探測多普勒頻移的能力,所以這項技術也不是什么新鮮事。
然而,4D雷達是將測量的第四維數據整合到3D雷達中,以更好地了解和繪制環境地圖。即使具體技術并不新穎,但它的整合也具有新意,值得研究。
4D成像雷達的主要功能
技術顧問機構VSI Labs創始人兼總裁Phil Magney這樣解釋:“我認為時間應被用于第四維空間,一些公司就是這樣做的。老實說,4D更多的是營銷炒作,因為時間元素是從多普勒得到的。所以,如果是這樣的話,那么傳統的2D可以被稱為3D。”
Phil Magney
換句話說,時間因素一直是雷達功能的關鍵。當被問及同樣的問題時,NXP執行副總裁兼無線電頻率處理總經理Torsten Lehmann指出,4D成像傳感器的第四個要素是“橫向分辨率”。他說:“4D成像傳感器不僅可以測量距離和速度,還可以測量高度、方向和到達角度,同時以更高的分辨率識別物體,4D成像雷達不僅能識別水平平面,還能識別垂直平面,例如,汽車可以決定是在物體的‘下面’還是‘上面’通過。”
Torsten Lehmann
Lehmann繼續說:“想象一下,一輛汽車在高速公路上以每小時80公里的速度行駛,而一輛摩托車(一個低反射率的小物體)正以每小時200公里的速度從后面駛來。與攝像頭和LiDAR不同,這些改進的雷達可以識別最初相距很遠的摩托車,并識別出這兩個物體在以不同的速度移動。”
可以這樣說,到目前為止,雷達是唯一一種能夠在300米以上運行并識別高速運行物體的傳感器,而攝像頭和LiDAR都無法處理這么遠的距離和速度。
隨著高分辨率成像雷達的出現,包括許多雷達供應商都迫切希望將雷達提升為唯一能夠在惡劣天氣和光照條件下工作的高速傳感器。
4D成像之于汽車,首要目標是啥?
雷達是ADAS和自動駕駛中傳感器套件的關鍵元素。這項技術已經投入商業應用,特別是在各種ADAS功能上。從短期和長期來看,它的使用將增加。在短期內,立法和自愿安全承諾將進一步推動采用。從長遠來看,更高級別的自動駕駛將增加每輛車的雷達含量,從而對市場產生乘數效應。這是雷達技術的激動人心的時刻,許多變化正在發生。
不過,從理論到應用是一條很長的隧道,要看到光明需要時間的檢驗。自動駕駛也是這樣,它通常是以“自動化水平”來衡量的。簡而言之,這是一個從0到5的刻度,L0意味著絕對沒有自主性,L5表示完全無人駕駛功能。作為參考,目前大多數特斯拉汽車的評分都在L3,這被認為是一個不錯的分數。
從L0到L5的演變
自動駕駛意味著車輛安全,雖然從純技術角度來看,向更高級別的自動駕駛邁進是一個值得實現的目標,但歸根結底,其價值在于拯救生命。這就是為什么采用和改進雷達技術對ADAS開發者來說是一件越來越重要的事情。
NXP半導體ADAS市場總監Matthias Feulner說:“需要記住的是,迄今為止,很多發布都是概念證明,其中許多都是基于通用處理器的,用雷達專用處理器對(汽車)使用案例進行優化,才會有重大的提升。”他認為:“在最基本層面,我們的目標是避免事故和拯救生命,ADAS技術和雷達傳感器特別有助于提高駕駛安全性,避免傷亡。”
馬斯克的選擇
2020年10月,專門研究特斯拉軟件的黑客“green”在軟件更新中發現了新功能的暗示,他提醒消費者們,在特斯拉最近的軟件更新中增加了一個名為“Phoenix”的新雷達選項,Phoenix是Arbe雷達系統的名字。它可通過4D超高分辨率實時成像,識別、評估和應對從普通到特殊的挑戰場景,服務于現實世界的駕駛需求。
黑客爆料
無論速度、海拔、距離、大小或周圍的天氣和照明條件如何,Phoenix都能區分真正的威脅和錯誤的警報,以確保駕駛員、行人和其他易受傷害的道路使用者的安全。
一位消息人士稱,特斯拉正準備更新Model 3的面板,新的傳感器將是更新的一部分。
馬斯克最近表示:“現在的圖像識別依然是來源于孤立的圖片,而實際上這些圖片在時間上有密切關聯性。因此,如果過渡到4D,三維空間里加入了時間維度,它本質上就是視頻。這種架構上的變化已經進行了一段時間,還沒有真正推廣到量產車的任何車輛,但這才是完全自動駕駛真正需要的。”
或許,這為馬斯克討厭將LiDAR傳感器用于自動駕駛系統,“即使是免費的也不會用”找到了最好的理由。
最熱門趨勢之一
總的來說,4D成像雷達是最熱門的趨勢之一。未來,隨著雷達技術向更小的節點轉移,將出現高度集成的打包單一解決方案;天線陣列尺寸將大大擴展,從而能夠獲得更好的方位角和仰角分辨率,從而使點云更加致密。基于深度學習的算法也將并行發展,使雷達能夠進行三維目標檢測、分類和跟蹤。在這種情況下,雷達將開始使用一些LiDAR技術來提升分辨率,同時保持天氣和光照水平的獨立優勢。
雷達令人興奮的時刻已經到來。據預測,到2030年,在價格適度下降的情況下,汽車雷達將成為120億美元的市場。未來,能夠提供密集4D點云的4D成像雷達,將有助于實現更高精度的目標檢測、分類和跟蹤。在第一個十年,ADAS(L1和L2)將是主要市場驅動力;而在第二個十年,自動駕駛汽車將成為主要的市場驅動力。從長遠來看(2030-2040年),自動出行(L3、L4和L5)將推動市場,雷達含量也將不斷增加。
責任編輯:xj
-
特斯拉
+關注
關注
66文章
6317瀏覽量
126630 -
激光雷達
+關注
關注
968文章
3987瀏覽量
190065 -
4D
+關注
關注
0文章
61瀏覽量
11595
發布評論請先 登錄
相關推薦
正和微芯發布4D毫米波雷達SoC芯片RS6240
Arbe一級供應商Sensrad宣布與天翼交通科技締結框架合作協議,為其提供4D成像雷達
洛微科技FMCW 4D激光雷達榮獲“科技先鋒獎”
韓國成像雷達公司bitsensing融資2500萬美元 繼續開發4D雷達技術
華域汽車電子分公司攜手Uhnder開發新一代4D數字成像雷達
雷(4D成像)視融合:具備全天候全天時能力的新選擇
Uhnder 推出首款適用于更廣泛汽車市場的 4D 數字成像雷達芯片
行易道(Autoroad)發布了全球領先的4D成像雷達360°環視SLAM系統
新一代4D成像雷達為L3及更高級別自動駕駛鋪平道路!

賽恩領動攜手恩智浦憑借創新4D成像雷達榮獲歐洲科技大獎!
基于Arbe芯片組的經緯恒潤4D成像毫米波雷達LRR610將于2024年底正式投入批量生產
經緯恒潤4D成像毫米波雷達亮相 CES 2024

4D毫米波成像雷達的測試要求都有哪些嗯?

中央域控雷達:4D雷達新時代






 工商網監
工商網監
評論