 KUKA電伺服焊鉗,SGL_MoveToPos焊接前移動到焊點位置
KUKA電伺服焊鉗,SGL_MoveToPos焊接前移動到焊點位置
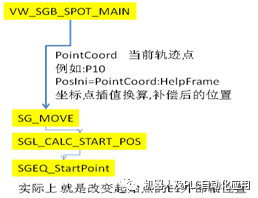
SGL_MoveToPos(SGEQ_StartPoint,SGEQ_StartPoint,#CLS_OPEN,MovementType)
MoveType =MovementType=#SG_PTP 點到點
ContType=#CLS_OPEN
TargetPos =SGEQ_StartPoint
HelpPos= SGEQ_StartPoint
GLOBALDEF SGL_MoveToPos(TargetPos:IN,HelpPos:IN,ContType:IN,MoveType:IN)
該程序用于在焊接前移動到焊接軌跡點使用
DECLE6POS TargetPos, HelpPos
DECL SG_Cont_T ContType
DECL SG_MoveType_T MoveType
CONTINUE
IF((ContType==#SOPEN) OR (ContType==#SCLOSE) OR (ContType==#CLS_OPEN))THEN ContType==#CLS_OPEN
; 關于PTP的第二近似定位=> LIN和LIN至PTP ..
SWITCH MoveTypeMoveType=#SG_PTP 點到點
CASE #SG_PTP 點到點
PTP TargetPos C_DIS 使用軌跡逼近
CASE #SG_LIN直線
LIN TargetPos C_DISC_DIS
CASE #SG_CIRC 圓弧
CIRC HelpPos, TargetPos C_DISC_DIS
ENDSWITCH
ELSE 如果沒有上述激活功能ContType=….直接移動沒有過渡
SWITCH MoveType
CASE #SG_PTP
PTP TargetPos
CASE #SG_LIN
LIN TargetPos
CASE #SG_CIRC
CIRC HelpPos, TargetPos
ENDSWITCH
ENDIF
CONTINUE
責任編輯:xj
原文標題:KUKA 電伺服焊鉗,SGL_MoveToPos焊接前移動到焊點位置
文章出處:【微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
-
機器人
+關注
關注
211文章
28575瀏覽量
207743 -
伺服
+關注
關注
16文章
652瀏覽量
41026 -
KUKA
+關注
關注
3文章
217瀏覽量
16574
原文標題:KUKA 電伺服焊鉗,SGL_MoveToPos焊接前移動到焊點位置
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
焊點壓力實時監測裝置的研發與應用
焊點能量實時檢測儀:確保焊接質量與效率的新利器
焊點壓力實時監測系統研究與應用進展
伺服電機位置誤差原因和維修
BGA焊接產生不飽滿焊點的原因和解決方法

步進電機的伺服控制方法有哪些
激光焊接如何保證焊點質量
PLC如何讀取伺服位置
伺服壓機如何確定移動位置
PCBA焊接中焊點拉尖的原因及解決辦法
伺服電缸和伺服壓機區別 伺服電缸能取代液壓油缸嗎

伺服電缸和伺服壓機區別 伺服電缸能取代液壓油缸嗎
焊接材料對焊點有什么基本要求?






 工商網監
工商網監
評論