") 基于脈沖激光器和ICCD攝像機(jī)實(shí)現(xiàn)水下距離選通同步控制系統(tǒng)的設(shè)計(jì)
基于脈沖激光器和ICCD攝像機(jī)實(shí)現(xiàn)水下距離選通同步控制系統(tǒng)的設(shè)計(jì)
水下激光成像技術(shù)是基于藍(lán)綠激光處于水下的傳輸“窗口”而發(fā)展起來(lái)的。激光器向水下目標(biāo)發(fā)射脈沖激光,測(cè)量從目標(biāo)反射回來(lái)的信號(hào),獲取目標(biāo)的圖像信息。由于藍(lán)綠激光成像系統(tǒng)的高分辨率和較遠(yuǎn)的作用距離,除了可以應(yīng)用于軍事領(lǐng)域之外還廣泛應(yīng)用于水下監(jiān)測(cè)、海洋生物遙測(cè)和石油開(kāi)采等領(lǐng)域,因此對(duì)其研究是非常有意義的。由于水下溶解物質(zhì)和懸浮體的存在,使得水下比較渾濁,產(chǎn)生后向散射影響比較嚴(yán)重,造成成像質(zhì)量急劇下降。為了有效地克服后向散射的影響,常選用距離選通成像技術(shù)。
水下距離選通成像系統(tǒng)主要由窄脈沖激光器、同步控制裝置、選通型ICCD攝像機(jī)組成。
同步控制技術(shù)主要是通過(guò)一個(gè)同步控制裝置,完成脈沖激光器和ICCD攝像機(jī)同步工作,通過(guò)精確控制ICCD選通門的開(kāi)肩和關(guān)閉來(lái)實(shí)現(xiàn)距離選通功能。為了有效同步,本設(shè)計(jì)使用高性能的FPGA產(chǎn)生納秒級(jí)的選通脈沖選通ICCD攝像機(jī),并且將測(cè)距的思想加入到電路中,對(duì)于固定距離和不定距離的水下目標(biāo)成像都可以精確控制距離延遲時(shí)間和門延遲時(shí)間,提高了電路的穩(wěn)定性和精確度,滿足設(shè)計(jì)要求。
1 水的光學(xué)特性對(duì)成像的影響
水的光學(xué)特性包括水的吸收特性和散射特性。水對(duì)光的吸收程度在不同光譜區(qū)域是不同的,具有明顯的選擇性。研究表明,沿岸海水的光譜透射窗口為520 nm。在實(shí)驗(yàn)中,常用Nd:YAG脈沖激光器,輸出波長(zhǎng)為1.064μm經(jīng)過(guò)調(diào)Q倍頻得到532 nm的綠光。由于水對(duì)光的吸收造成光能量的損失,對(duì)于稍長(zhǎng)距離的目標(biāo)成像,應(yīng)適當(dāng)加強(qiáng)激光器的功率。
水的散射包括水本身的散射和水中懸浮顆粒引起的散射。水下成像系統(tǒng)中常采用脈沖激光,該激光脈沖在水下傳輸中會(huì)受到散射作用的影響,由于同一束光的光子在水體中的傳輸路徑不同,引起了傳輸延遲,在時(shí)域上表現(xiàn)為脈沖的展寬。脈沖展寬對(duì)于單脈沖距離選通成像的影響較大,距離選通的要求之一,門延遲時(shí)間等于激光脈沖寬度,而激光在水下傳輸時(shí)發(fā)生展寬,因此需要知道具體展寬的程度。采用小角度逼近法和唯像法分別進(jìn)行估算,但它們都具有局限性,對(duì)于實(shí)際應(yīng)用中只具有參考價(jià)值。
2 水下距離選通同步控制原理
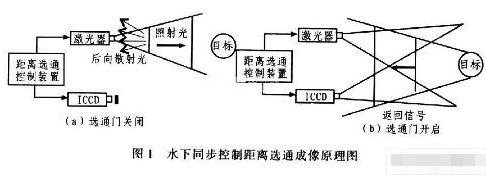
距離選通技術(shù)是通過(guò)脈沖激光器和選通ICCD攝像機(jī)在時(shí)序上正確配合,根據(jù)散射光返回的時(shí)間與目標(biāo)反射光返回的時(shí)間不同,將攝像機(jī)的選通時(shí)刻正好設(shè)置在目標(biāo)反射信號(hào)剛好到達(dá)ICCD攝像機(jī)時(shí)刻,選通后成像。水下同步控制距離選通成像原理圖如圖1所示,激光器發(fā)射很強(qiáng)的短脈沖,通過(guò)擴(kuò)束,將目標(biāo)的全部或者目標(biāo)的關(guān)鍵特征部位照亮,由目標(biāo)反射的激光返回到ICCD攝像機(jī),當(dāng)激光脈沖在往返途中時(shí),ICCD攝像機(jī)選通門關(guān)閉,這樣可以擋住后向散射光。當(dāng)反射光到達(dá)ICCD攝像機(jī)時(shí)選通門開(kāi)啟,讓來(lái)自目標(biāo)的有用信號(hào)進(jìn)入ICCD攝像機(jī)。選通門延遲時(shí)間與反射回來(lái)的激光脈沖一致,這樣就可以大大減少后向散射的影響,提高回波信號(hào)信噪比。
3 水下距離選通激光成像同步控制裝置
3.1 設(shè)計(jì)思路
水下激光成像系統(tǒng)中,由于水下的吸收嚴(yán)重,通常選用超短激光脈沖,又因?yàn)閹瑨呙柚芷跒閹资撩耄瑹o(wú)法與激光器同步,因此選用在CCD攝像機(jī)前加裝選通像增強(qiáng)器,可以實(shí)現(xiàn)納秒級(jí)選通。為了產(chǎn)生納秒級(jí)的選通脈沖,需要有高頻時(shí)鐘信號(hào),考慮到高頻電路容易受外界噪聲干擾及內(nèi)部延時(shí)要小等問(wèn)題,因此選用FPGA來(lái)完成設(shè)計(jì)。
理論上,假定距離延遲時(shí)間為T,激光脈沖在水下到目標(biāo)并且從目標(biāo)返回到接收器的距離為L(zhǎng),水下的相對(duì)折射率為n,光速為C,于是可得到T=nL/C;門延遲預(yù)設(shè)值為激光脈沖寬度。可是,由于水下環(huán)境比較復(fù)雜,要得到準(zhǔn)確的相對(duì)折射率值很困難,同時(shí),從前面分析可知,激光脈沖在水下傳輸時(shí)會(huì)發(fā)生展寬,所以不能直接通過(guò)計(jì)算得到準(zhǔn)確的距離延遲和門延遲。
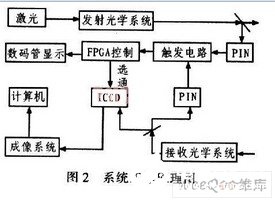
本設(shè)計(jì)對(duì)上述問(wèn)題提出解決方案,其工作原理圖如圖2所示。工作時(shí),激光器首先向水下目標(biāo)發(fā)射脈沖激光束,由2個(gè)PIN管探測(cè)到的信號(hào)分別作為選通的起始信號(hào)和結(jié)束信號(hào),該計(jì)數(shù)值可以通過(guò)電路中的數(shù)碼管直觀看出。當(dāng)?shù)诙伟l(fā)射激光柬時(shí),以第一次測(cè)得的距離延遲為計(jì)數(shù)初值,還應(yīng)考慮PIN管的響應(yīng)時(shí)間、觸發(fā)電路的延時(shí)和像增強(qiáng)器驅(qū)動(dòng)電路的延時(shí),提前輸出選通脈沖。由于在水下傳輸過(guò)程中激光脈沖發(fā)生展寬,對(duì)于門延遲時(shí)間置數(shù)在未經(jīng)傳輸前激光脈寬的基礎(chǔ)上,不斷增加門延遲計(jì)數(shù)初值,當(dāng)?shù)玫綕M意的選通圖像時(shí),系統(tǒng)復(fù)位。
3.2 設(shè)計(jì)過(guò)程
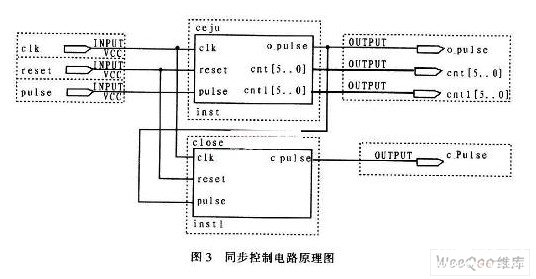
根據(jù)上述的設(shè)計(jì)思路,在實(shí)現(xiàn)過(guò)程中,選用了脈沖寬度為6 ns,重復(fù)頻率為1 kHz的激光器,有效選通脈寬小于等于40 ns的像增強(qiáng)器,通過(guò)光錐耦合方式與CCD相連的IC-CD,速率可達(dá)到500 MHz的Ahera STraTIx III系列的FPGA,它是一種低功耗高性能的FPGA,步長(zhǎng)可達(dá)到2 ns。同步控制的原理圖如圖3所示,該設(shè)計(jì)包含2個(gè)模塊,第1個(gè)模塊實(shí)現(xiàn)測(cè)距和定時(shí)計(jì)數(shù)的功能并且輸出門開(kāi)啟脈沖,第2個(gè)模塊實(shí)現(xiàn)定時(shí)功能產(chǎn)生門關(guān)閉脈沖。
當(dāng)激光器發(fā)射第一個(gè)脈沖激光束時(shí),經(jīng)分光器分光后一小部分光被PIN管接收,將光信號(hào)經(jīng)觸發(fā)電路形成高電平信號(hào),開(kāi)始啟動(dòng)第一個(gè)模塊的測(cè)距功能,其中一個(gè)計(jì)數(shù)器進(jìn)行加計(jì)數(shù)而另一個(gè)計(jì)數(shù)器暫不工作。當(dāng)從目標(biāo)反射回來(lái)的光剛到達(dá)接收端時(shí),放置在接收端的PIN管接收到信號(hào),并通過(guò)觸發(fā)產(chǎn)生測(cè)距停止的信號(hào),測(cè)距的結(jié)果可通過(guò)數(shù)碼管直觀看出。
當(dāng)激光脈沖發(fā)射第二個(gè)脈沖激光束時(shí),由觸發(fā)電路產(chǎn)生的高電平信號(hào)繼續(xù)啟動(dòng)第一個(gè)模塊工作,其中一個(gè)計(jì)數(shù)器以第一次計(jì)數(shù)值為初值開(kāi)始做遞減計(jì)數(shù),當(dāng)計(jì)數(shù)器減到零時(shí),輸出高電平脈沖作為選通脈沖,打開(kāi)ICCD選通門,而另外一個(gè)計(jì)數(shù)器將做第二次測(cè)距工作,進(jìn)行遞加計(jì)數(shù),作為下一次選通計(jì)數(shù)的初值。
當(dāng)選通脈沖到來(lái)的同時(shí)啟動(dòng)第二個(gè)模塊,由程序控制設(shè)定的計(jì)數(shù)初值作為起始值,計(jì)數(shù)器進(jìn)行減計(jì)數(shù),當(dāng)計(jì)數(shù)減到零時(shí),輸出高電平脈沖關(guān)閉ICCD選通門,一次選通過(guò)程結(jié)束,等待下一個(gè)脈沖的到來(lái)。
3.3 仿真與分析
本設(shè)計(jì)仿真在Ahera公司的開(kāi)發(fā)軟件QuartersⅡ8.0中完成,使用Verilog語(yǔ)言對(duì)模塊進(jìn)行編輯。本文分別對(duì)兩個(gè)模塊進(jìn)行仿真,仿真結(jié)果如圖4所示。時(shí)鐘周期為2 ns,pulse為觸發(fā)脈沖,cnt為模塊中一個(gè)計(jì)數(shù)器的計(jì)數(shù)值,cntl為模塊中另一個(gè)計(jì)數(shù)器的計(jì)數(shù)值。o_Pulse為選通脈沖。程序中假定測(cè)出的距離延遲時(shí)間為8個(gè)周期。由圖4可看出,cnt和cntl不斷實(shí)現(xiàn)測(cè)距和計(jì)時(shí)功能,第一個(gè)觸發(fā)脈沖到來(lái),cnt計(jì)數(shù)完成測(cè)距功能而cnt1不工作,當(dāng)接收到目標(biāo)反射回來(lái)的觸發(fā)脈沖時(shí),cnt實(shí)現(xiàn)計(jì)時(shí)功能而cntl完成測(cè)距工作。此功能在程序中采用的狀態(tài)機(jī)的方法實(shí)現(xiàn)。此仿真還考慮到觸發(fā)延時(shí)和ICCD的開(kāi)機(jī)延時(shí),這些延時(shí)都可通過(guò)實(shí)驗(yàn)測(cè)得,在這里假定延遲為一個(gè)周期,如果沒(méi)有考慮延遲,當(dāng)cnt等于O時(shí)刻將輸出一個(gè)開(kāi)機(jī)脈沖,由圖4可看出:該脈沖提前一個(gè)周期輸出,實(shí)現(xiàn)精確計(jì)時(shí)。
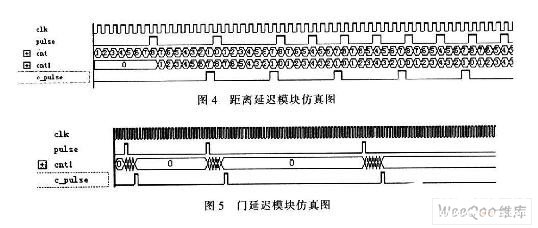
圖5為門延遲模塊仿真圖。從圖5可以看出,PULSE為開(kāi)機(jī)脈沖,cntl為門延遲計(jì)時(shí),當(dāng)脈沖來(lái),計(jì)數(shù)器開(kāi)始計(jì)時(shí)。在仿真中考慮到脈沖在水下傳輸?shù)难舆t問(wèn)題,因此門延遲的計(jì)數(shù)初值為基準(zhǔn),每來(lái)一個(gè)脈沖,計(jì)數(shù)初值加l,直到得到滿意的選通圖像為止。為了更加精確,程序中可采用阻塞賦值的方法產(chǎn)生微小延遲。
該設(shè)計(jì)將預(yù)置初值和計(jì)時(shí)統(tǒng)一起來(lái),簡(jiǎn)化在實(shí)際過(guò)程中的人為操作,一旦脈沖激光束發(fā)射將自動(dòng)完成選通工作。設(shè)計(jì)中使用的邏輯資源少,可以大大減小信號(hào)傳輸延時(shí),對(duì)電路的穩(wěn)定性能有較大提高。
4 結(jié)論
距離選通技術(shù)可以減小因后向散射產(chǎn)生的背景噪聲,提高成像系統(tǒng)的信噪比,使成像質(zhì)量得到較大提高,但需要嚴(yán)格控制時(shí)序才能有效實(shí)現(xiàn)。通過(guò)水下環(huán)境對(duì)成像質(zhì)量的分析,闡述了在水下對(duì)激光成像中存在的問(wèn)題。為了提高同步控制的精確度,采用了高性能的FPGA,產(chǎn)生納秒級(jí)選通脈沖選通ICCD攝像機(jī)。傳統(tǒng)的同步控制電路中,常采用預(yù)置和計(jì)數(shù)分開(kāi),將理論計(jì)算值作為延遲計(jì)數(shù)值等,對(duì)于環(huán)境比較復(fù)雜的情況下將出現(xiàn)較大誤差。
本設(shè)計(jì)將測(cè)距思想引入該裝置中,對(duì)于未知距離的目標(biāo)以及不定距離的目標(biāo)均能自動(dòng)成像,廣泛應(yīng)用于對(duì)水下目標(biāo)的探測(cè)和成像系統(tǒng)中。
責(zé)任編輯:gt
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6620瀏覽量
110610 -
激光器
+關(guān)注
關(guān)注
17文章
2517瀏覽量
60376 -
攝像機(jī)
+關(guān)注
關(guān)注
3文章
1601瀏覽量
60047
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
脈沖激光頻域干涉技術(shù)在泵浦探測(cè)實(shí)驗(yàn)中的應(yīng)用
半導(dǎo)體激光器電源控制系統(tǒng)設(shè)計(jì)
如何利用AD7888實(shí)現(xiàn)度激光器監(jiān)測(cè)系統(tǒng)的設(shè)計(jì)?
怎么實(shí)現(xiàn)CMOS數(shù)字攝像機(jī)內(nèi)部控制系統(tǒng)的設(shè)計(jì)?
MOPA脈沖激光器中的降功率頻率點(diǎn) 2021-04-26 09:07 預(yù)計(jì) 8 分鐘讀完
激光配件——脈沖激光電源的原理
測(cè)距儀中新型的脈沖激光光源
仿真軟件在脈沖激光器驅(qū)動(dòng)電源設(shè)計(jì)中的應(yīng)用
峰值功率等脈沖激光器相關(guān)名詞的解釋
CPLD在大電流窄脈沖激光器電源設(shè)計(jì)中的應(yīng)用
脈沖激光能量參數(shù)關(guān)系_脈沖激光器的能量換算
基于脈沖激光器降功率頻率點(diǎn)的實(shí)現(xiàn)意義
PLL-8XX-150脈沖激光器
準(zhǔn)連續(xù)(QCW)激光器與連續(xù)激光器及脈沖激光器區(qū)別在哪?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論