") 機器視覺系統(tǒng)基于LabVIEW系統(tǒng)校準(zhǔn)與圖像校正
機器視覺系統(tǒng)基于LabVIEW系統(tǒng)校準(zhǔn)與圖像校正
機器視覺系統(tǒng)需要的信息包含在采集到的數(shù)字圖像中,以像素的形式存在。要實現(xiàn)準(zhǔn)確測量和控制,需要使用真實世界的坐標(biāo)系和測量單位,即要得到像素與真實世界坐標(biāo)系的映射關(guān)系,才能進行后續(xù)處理。
· 透視畸變(perspective distortion):相機未能垂直于被測目標(biāo)安裝
· 徑向畸變(radial lens distortion):相機所使用的鏡頭特性并不都與其光心處的特征一致
· 切向畸變(tangential distortion):圖像傳感器未能與鏡頭光面平行安裝
· 非線性畸變(nonlinear distortion):檢測目標(biāo)表面位非線性平面,存在起伏
· 漸暈(vignetting):光源不能提供均勻光照
· 采集圖像灰度分布不均:傳感器有雜質(zhì)或者目標(biāo)表面非均勻
機器視覺系統(tǒng)的校準(zhǔn)多基于對各種畸變或相機進行建模完成,不同校準(zhǔn)方法效果因使用場合而異。可以使用誤差映射表和誤差統(tǒng)計對選用的校準(zhǔn)方法進行定量評價。
畸變模型
通過綜合上述多種畸變方式,可獲得圖像處理前后的坐標(biāo)關(guān)系。
畸變徑向分量:
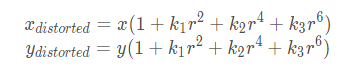
畸變切向分量:

在上述公式中:
包含了5個畸變參數(shù):k1、k2、k3、p1、p2
對于一個給定的鏡頭成像系統(tǒng),這5個畸變參數(shù)怎么獲得?這就涉及到“相機標(biāo)定”,即需要根據(jù)一系列已知的若干對原成像點與畸變成像點的坐標(biāo)值,帶入以上公式來解出。
圖像校準(zhǔn)
機器視覺系統(tǒng)的校準(zhǔn)是為了找出圖像中像素點與真實世界坐標(biāo)系映射關(guān)系的過程,這一過程通常在空間域進行。
簡易系統(tǒng)校準(zhǔn)法(simple calibration):也稱點-距校準(zhǔn)法(point-distance calibration)。直接根據(jù)小孔成像模型計算出圖像像素大小或像素間距在工作面上對應(yīng)的實際距離,這是一種不考慮任何畸變近乎理想的方法,適用于畸變較小的場合。使用IMAQ Set Simple Calibration2來快速建立點距校準(zhǔn)的映射關(guān)系。
透視校準(zhǔn)(perspective calibration):也稱點-坐標(biāo)校準(zhǔn)法(point-coordination calibration)。通過一系列已知真實世界坐標(biāo)和尺寸信息的點確定三維世界坐標(biāo)系中目標(biāo)點到圖像像素的數(shù)學(xué)映射關(guān)系,已知點不能少出四個,已知點數(shù)越多關(guān)系越準(zhǔn)確,適用于存在透視畸變的系統(tǒng)。使用IMAQ Learn Perspective Calibration來校準(zhǔn)透視畸變。
以上兩種方法都是通過手工輸入已知信息點實現(xiàn)系統(tǒng)校準(zhǔn)的方法。
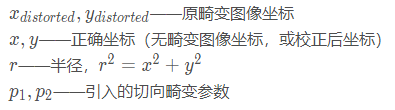
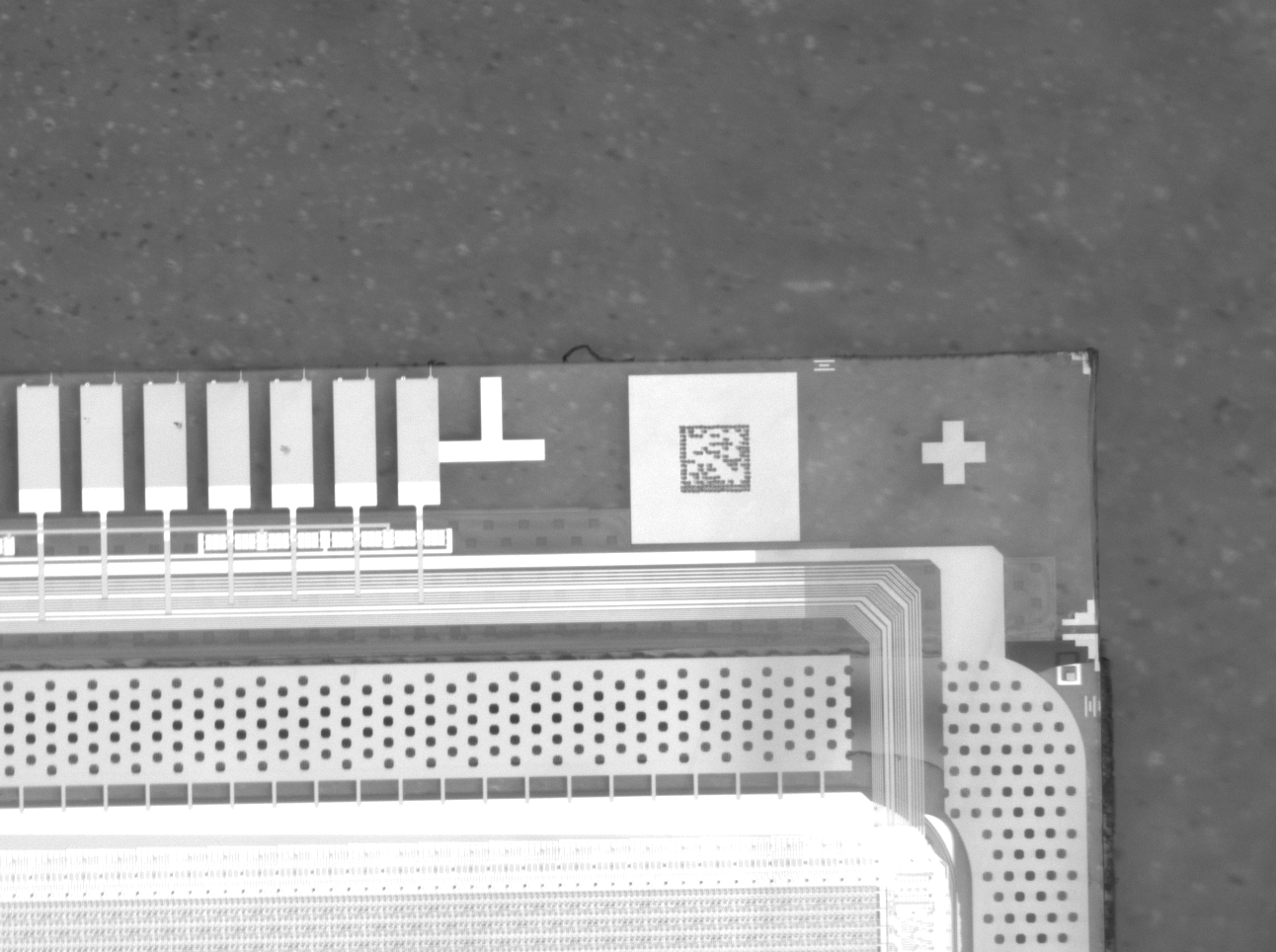
校準(zhǔn)點陣(calibration grid):校準(zhǔn)點陣是一副縱向和橫向相鄰點中心間距相等的點陣圖像,默認(rèn)情況下會使用陣中左上角的中心作為原來建立圖像坐標(biāo)系,把橫縱方向相鄰點距離作為輸入,即可得到所有點在世界坐標(biāo)的位置。(用最小二乘法確定畸變模型最佳參數(shù))適用于徑向或者切向畸變,盡可能使點陣覆蓋整個機器視覺系統(tǒng)所檢測的工作區(qū)域。
NI Vision校準(zhǔn)函數(shù)分類:
1.簡易校準(zhǔn):相機垂直于觀測目標(biāo)且鏡頭畸變可忽略不計
IMAQ Set Simple Calibration2:使用橫縱坐標(biāo)上的像素比率設(shè)置簡單的校準(zhǔn)。
2.透視畸變:相機未垂直于觀測目標(biāo)安裝
IMAQ Learn Perspective Calibration:學(xué)習(xí)透視校準(zhǔn)信息,以糾正相機引入的不垂直于被檢查對象平面的透視失真
3.鏡頭畸變:確定鏡頭畸變模型參數(shù)(分割畸變模型;多項式畸變模型)
IMAQ Learn Distortion Model:學(xué)習(xí)相機和鏡頭設(shè)置的變形模型。如果相機不垂直于被檢查的對象,可以將失真建模與透視校準(zhǔn)結(jié)合起來。
(需要對鏡頭畸變進行校準(zhǔn)的常見場合:a.檢測目標(biāo)具有較大平坦表面但檢測特征區(qū)域相對較小 b.要求通過建立多項式畸變模型來提高檢測結(jié)果的精確度 c.相機垂直固定于檢測目標(biāo)上方并可移動以檢測各個區(qū)域 d.可觀測的視場有限)
4.相機模型建立:在三維坐標(biāo)系中建立相機模型
IMAQ Learn Camera Model:學(xué)習(xí)詳細(xì)的相機特性,包括焦距、光學(xué)中心和失真模型。因為攝影機模型包含一個失真模型,所以不需要計算單獨的失真模型。
(基于多幅校準(zhǔn)點陣圖像(一般多于5幅),相機,檢測目標(biāo)之間的關(guān)系來建立相機模型)
IMAQ Get Camera Model:返回已學(xué)習(xí)攝影機模型的內(nèi)部和外部參數(shù)。
5.工作面非線性:校準(zhǔn)工作平面位非線性曲面的系統(tǒng)
IMAQ Learn Micro Plane:學(xué)習(xí)用于校正非平面工作平面中圖像的微平面校準(zhǔn)信息
(與IMAQ Learn Distortion Model,IMAQ Learn Camera Model實現(xiàn)的校準(zhǔn)方法又統(tǒng)稱為點陣校準(zhǔn)法(Grid based calibration),均可用IMAQ Calibration Target to Points-Circular Dots 2自動生成的reference points 簇作為輸入來確定模型參數(shù))
6.輸入輔助:檢測所采集校準(zhǔn)點陣圖像中的各點,并返回各點中心在圖像中的像素坐標(biāo)以及他們在校準(zhǔn)點中的世界坐標(biāo)。
IMAQ Calibration Target to Points-Circular Dots 2:檢測二值圖像中的圓點,并返回用于校準(zhǔn)的像素點和真實世界點,使用提供的灰度圖像細(xì)化圓點的位置。(可以自動的從整幅校準(zhǔn)點陣圖或其中的某個ROI中檢測各個點中心的像素坐標(biāo),并能根據(jù)輸入的點陣信息(點間距和度量點位)計算世界坐標(biāo),工作時需要包含二值圖(提取校準(zhǔn)點)和灰度圖(優(yōu)化調(diào)整像素坐標(biāo)))
7.坐標(biāo)校準(zhǔn)及轉(zhuǎn)換:
IMAQ Set Calibration Axis Info:將坐標(biāo)系信息指定給校準(zhǔn)模板圖像。用于設(shè)定校準(zhǔn)信息的世界坐標(biāo)系
IMAQ Convert Pixel to Real World:將圖像中的像素坐標(biāo)轉(zhuǎn)換為世界坐標(biāo)
IMAQ Convert Real World to Pixel:將世界坐標(biāo)轉(zhuǎn)換為圖像中的像素坐標(biāo)
8.校準(zhǔn)信息處置:
IMAQ Set Calibration Info2:將校準(zhǔn)模板圖像中的校準(zhǔn)信息關(guān)聯(lián)到另一幅圖像中
IMAQ Get Calibration Info:讀取與圖像關(guān)聯(lián)的圖像校準(zhǔn)信息
IMAQ Get Calibration Thumbnail Image:獲取系統(tǒng)校準(zhǔn)過程中所保存的縮略圖
IMAQ Compact Calibration Info:刪除系統(tǒng)校準(zhǔn)過程中所使用的相關(guān)信息及縮略圖,以壓縮包含系統(tǒng)校準(zhǔn)信息的文件尺寸
IMAQ Read Image And Vision Info:從PNG格式的文件中讀取圖像和機器視覺信息
IMAQ Write Image And Vision Info File2:將圖像和機器視覺信息寫入PNG格式的文件
9.圖像矯正
IMAQ Correction Learn Setup:配置圖像矯正過程要用到的參數(shù);
IMAQ Correct Calibration Image:對包含校準(zhǔn)信息的圖像進行矯正;
透視畸變的校準(zhǔn)一般作用于整幅圖像,而鏡頭畸變,相機模型以及非線性工作面的準(zhǔn)則既能作用于整幅圖像也能作用于指定ROI。
生成系統(tǒng)校準(zhǔn)信息
若系統(tǒng)中存在鏡頭畸變,透視畸變且工作面為起伏的非平面,那么可以先使用IMAQ Learn Distortion Model,再用IMAQ Learn Perspective Calibration,最后用IMAQ Learn Micro Plane對系統(tǒng)進行校準(zhǔn)。
圖像明暗場矯正函數(shù):
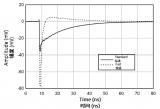
1.IMAQ Flat Field Correct:使用平場和暗場圖像校正圖像強度并返回校正后的圖像。
2.IMAQ Estimate Flat Field Model:通過在提供的圖像上擬合數(shù)學(xué)模型來返回平面場圖像。根據(jù)從原圖像中選取的點陣,擬合一個代表圖像灰度分布的多項式模型,并基于該模型估算明場圖像用于明場矯正。
3.IMAQ Compute Average Image:計算所提供圖像的平均圖像。
4.IMAQ Compute Media Image:計算所提供圖像的中值
坐標(biāo)校準(zhǔn)
平面坐標(biāo)系可以使用坐標(biāo)原點,橫軸的角度以及縱軸的方向來表示。
NI Vision的系統(tǒng)校準(zhǔn)VI按照以下原則定義:
1.坐標(biāo)原點:若為手工輸入點,去兩個方向上坐標(biāo)值均為最小的點中心;若使用校準(zhǔn)矩陣,則去左上角點中心。
2.橫軸的角度為0:即橫軸由點陣首行各點確定的矢量決定。
3.縱軸的方向:間接方向(indirect)與笛卡爾坐標(biāo)系的縱軸方向(direct)相反。
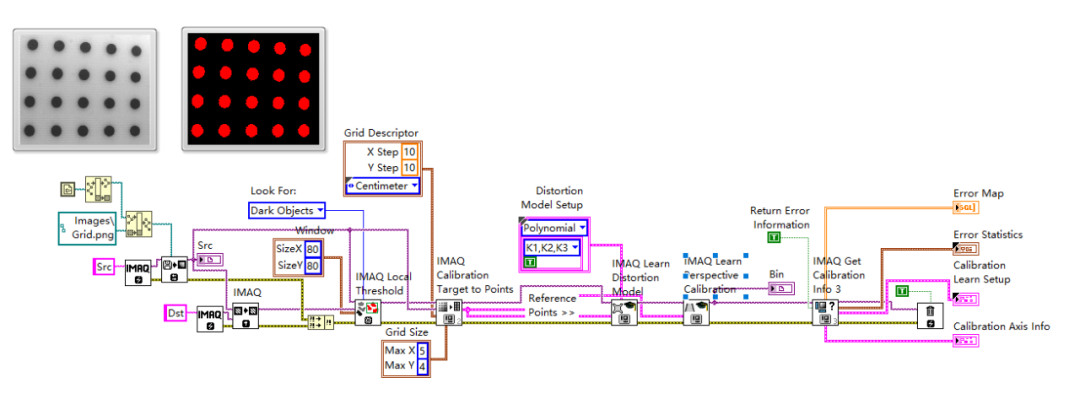
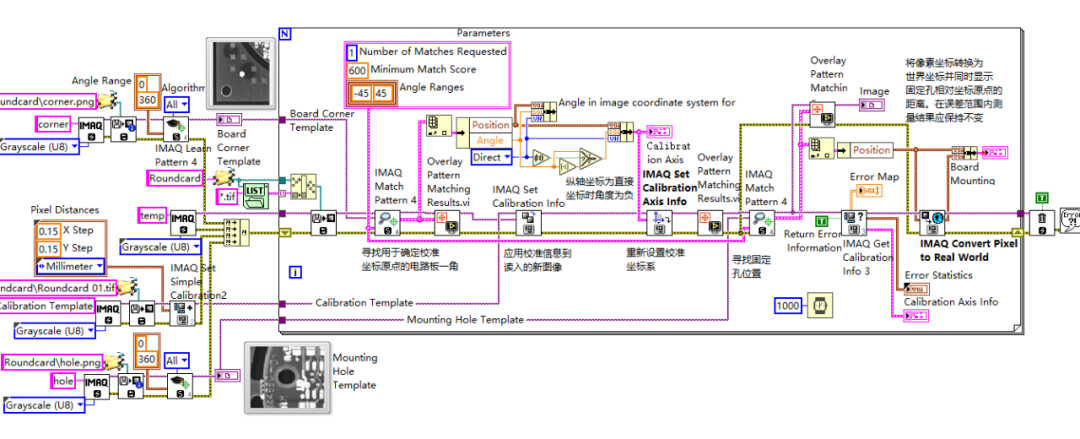
即當(dāng)使用NI Vision提供的VI建立的坐標(biāo)系進行校準(zhǔn)后,得到的像素坐標(biāo)和世界坐標(biāo)之間的映射關(guān)系是建立在默認(rèn)校準(zhǔn)坐標(biāo)系基礎(chǔ)上的。而在實際中,不能保證產(chǎn)品每次在固定位置檢測,所以需要搜索固定目標(biāo)特征來進行建系,實現(xiàn)自動檢測。
IMAQ Set Calibration Axis Info2:為圖像重新設(shè)置坐標(biāo)系
方法一:角度法(坐標(biāo)原點,旋轉(zhuǎn)角,縱軸方向)
適合沒有畸變且新坐標(biāo)原點位于圖像中的機器視覺系統(tǒng),可將坐標(biāo)原點設(shè)置為邊緣線的交叉點或固定特征中心處,縱軸方向根據(jù)需求指定為間接或直接方向。
夾角正負(fù)與縱軸方向有關(guān),若新坐標(biāo)系與參考坐標(biāo)系縱軸方向相同,則旋轉(zhuǎn)角度為正,相反則旋轉(zhuǎn)角度為負(fù)。大小為新坐標(biāo)系相對于參考坐標(biāo)系橫軸沿逆時針方向旋轉(zhuǎn)的度數(shù)。
方法二:雙點法(坐標(biāo)原點,位于橫軸正方向的點,坐標(biāo)系類型)
適合有畸變且可以直接從圖像中確定新坐標(biāo)原點位置的機器視覺系統(tǒng),坐標(biāo)原點與橫坐標(biāo)上的點所構(gòu)成的直線與圖像水平方向的夾角指明了新坐標(biāo)系的旋轉(zhuǎn)角。
方法三:三點法
適合不僅有畸變,被測目標(biāo)還會在圖像中平移,旋轉(zhuǎn)。
先使用A,B兩點確定一條坐標(biāo)軸和方向,用C點與A,B所成直線的垂直交點來確定坐標(biāo)原點。再基于坐標(biāo)系類型,確定另一個坐標(biāo)軸。
IMAQ Build CoordSys(Points)封裝了雙點法和三點法,開發(fā)時直接根據(jù)目標(biāo)上的特征點,調(diào)用該VI來確定參考或測量坐標(biāo)系。
一旦重新設(shè)立了校準(zhǔn)坐標(biāo)系,所有校準(zhǔn)信息都將基于新定義的坐標(biāo)系。
校準(zhǔn)坐標(biāo)使用
誤差與校準(zhǔn)質(zhì)量
測量結(jié)果質(zhì)量可根據(jù)準(zhǔn)確度(accuracy)測量值與真值的接近程度和精密度(precision)相同類似測量環(huán)境下多次測量值之間的相互接近的程度等指標(biāo)來衡量。
誤差:用于定量表示測量的準(zhǔn)確度。
·從表示方法來看
1.絕對誤差(absolute error):測量值與真值之間的差表示為
,x為測量值,u為真值。
2.相對誤差(relative error):絕對誤差與真值的比值表示為
,反映了測量誤差在真實值中所占的比例。
·從成因來看
1.系統(tǒng)誤差(systematic error):由測量方法,儀器,操作等引起,有固定的方向,可重復(fù)出現(xiàn),可對系統(tǒng)校準(zhǔn)來消除。
2.偶然誤差(accidental error):也稱隨機誤(random error):偶然的不可避免的原因造成,大小和方向都不固定,不可通過系統(tǒng)校準(zhǔn)消除。
精密度:相同或類似測量環(huán)境下多次測量值之間的分散程度,精密度是保證準(zhǔn)確度的先決條件,只有消除了系統(tǒng)誤差的前提下,精密度越高,準(zhǔn)確度才會越高。
·平均偏差(average deviation)與平均值差值的平均值
某次測量值與平均值之間的差稱為偏差表示為
其中xn表示N次測量結(jié)果的平均值。在N次測量中,偏差絕對值最大的測量值可能與真值差距最大。可以使用測量值偏差絕對值的平均值(平均偏差)來表示一組測量值的精密度
。
·標(biāo)準(zhǔn)偏差(standard deviation)
實際工作中多用標(biāo)準(zhǔn)偏差表示數(shù)據(jù)精密度,他的數(shù)值大小只說明在一定的條件下進行多次測量時隨機誤差出現(xiàn)的概率密度分布情況。
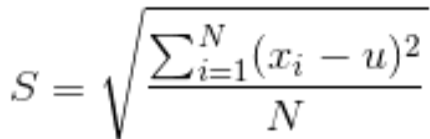
其中u表示真值
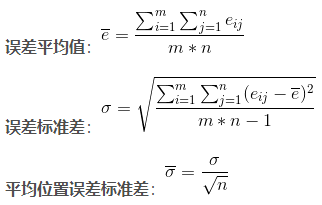
IMAQ Get Calibration Info3:返回用來衡量系統(tǒng)校準(zhǔn)質(zhì)量的相關(guān)信息,包括誤差映射表(error map),畸變率(%distortion),平均誤差(mean error),最大誤差(maximum error)以及標(biāo)準(zhǔn)差等。
誤差映射:由一個和圖像大小相同的二維數(shù)組組成,數(shù)組中每個元素對應(yīng)各個像素的坐標(biāo)轉(zhuǎn)換為世界坐標(biāo)時產(chǎn)生的位置誤差,表中的值本質(zhì)可認(rèn)為是絕對誤差。

其中
代表計算得到的世界坐標(biāo),(x,y) 表示圖像中坐標(biāo)為(i,j) 的像素在世界坐標(biāo)系中點真實坐標(biāo),eij為位置誤差,其值越小,坐標(biāo)越精確。
畸變率:可用來說明采集圖像相對于正常圖像的變形情況,等于像素位置誤差占像素到光心對應(yīng)像素距離的百分比,本質(zhì)屬于相對誤差。當(dāng)像素畸變率為正時,成像畫面呈桶形向外膨脹;當(dāng)畸變率為負(fù)時,成像畫面將向中間收縮;畸變率越大,圖像畸變越嚴(yán)重。一般需確保畸變小于1%。
圖像幾何校正
若已知機器視覺系統(tǒng)的畸變特性并得到了畸變的數(shù)學(xué)模型,便可以糾正所采集圖像中的透視畸變和鏡頭畸變,將采集的圖像轉(zhuǎn)換為矯正圖像。
IMAQ Correction Learn Setup:用于配置圖像矯正時要用到的ROI,如何使用這些ROI以及圖像的縮放方式。
IMAQ Correct Calibrated Image:可通過平移,放大,插值等方法對整個輸入圖像進行矯正,并生成新的矯正圖像。
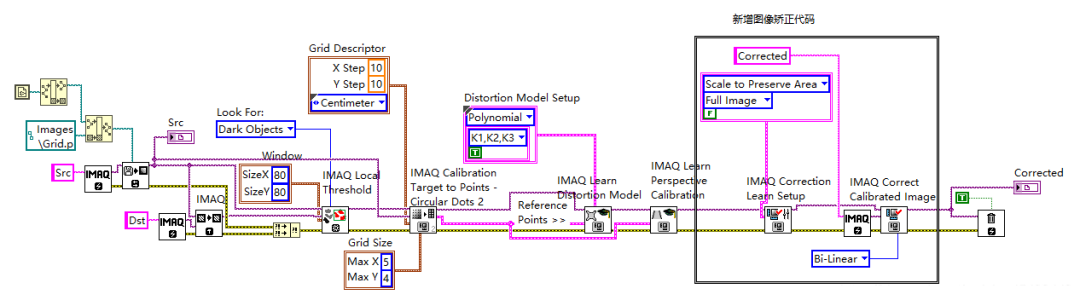
圖像矯正
原文標(biāo)題:機器視覺圖像處理——基于LabVIEW系統(tǒng)校準(zhǔn)與圖像校正
文章出處:【微信公眾號:電子發(fā)燒友網(wǎng)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
責(zé)任編輯:haq
-
LabVIEW
+關(guān)注
關(guān)注
1976文章
3657瀏覽量
324897 -
圖像處理
+關(guān)注
關(guān)注
27文章
1299瀏覽量
56838 -
機器視覺
+關(guān)注
關(guān)注
162文章
4403瀏覽量
120557
原文標(biāo)題:機器視覺圖像處理——基于LabVIEW系統(tǒng)校準(zhǔn)與圖像校正
文章出處:【微信號:elecfans,微信公眾號:電子發(fā)燒友網(wǎng)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
安森美機器視覺系統(tǒng)解決方案
機器視覺系統(tǒng)用途與實現(xiàn)及市場趨勢
機器視覺系統(tǒng)如何選擇圖像傳感器
CCD機器視覺系統(tǒng)的工作原理和特性
機器視覺系統(tǒng)與運動控制系統(tǒng)的區(qū)別
機器視覺系統(tǒng)的工作原理和應(yīng)用領(lǐng)域
機器視覺系統(tǒng)五個模塊介紹

機器視覺系統(tǒng)的組成部分

什么是機器視覺中的圖像采集?
機器視覺中圖像采集卡的功能與應(yīng)用

機器視覺系統(tǒng)和人工智能有什么區(qū)別





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論