") 微機械陀螺儀工作原理_微機械陀螺儀的應(yīng)用
微機械陀螺儀工作原理_微機械陀螺儀的應(yīng)用
微機械陀螺儀工作原理
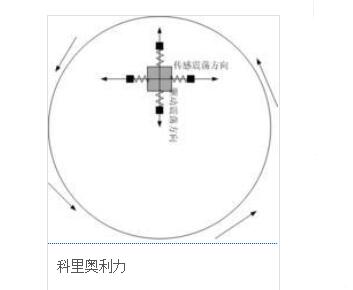
微機械陀螺儀(MEMS gyroscope)的工作原理 傳統(tǒng)的陀螺儀主要是利用角動量守恒原理,因此它主要是一個不停轉(zhuǎn)動的物體,它的轉(zhuǎn)軸指向不隨承載它的支架的旋轉(zhuǎn)而變化。但是微機械陀螺儀的工作原理不是這樣的,因為要用微機械技術(shù)在硅片襯底上加工出一個可轉(zhuǎn)動的結(jié)構(gòu)可不是一件容易的事。微機械陀螺儀利用科里奧利力——旋轉(zhuǎn)物體在有徑向運動時所受到的切向力。下面是導(dǎo)出科里奧利力的方法。有力學(xué)知識的讀者應(yīng)該不難理解。
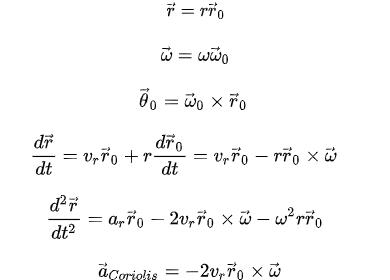
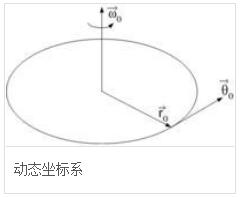
在空間設(shè)立動態(tài)坐標(biāo)系(圖一)。用以下方程計算加速度可以得到三項,分別來自徑向加速、科里奧利加速度和切向加速度。
如果物體在圓盤上沒有徑向運動,科里奧利力就不會產(chǎn)生。因此,在MEMS陀螺儀的設(shè)計上,這個物體被驅(qū)動,不停地來回做徑向運動或者震蕩,與此對應(yīng)的科里奧利力就是不停地在橫向來回變化,并有可能使物體在橫向作微小震蕩,相位正好與驅(qū)動力差90度。(圖二)MEMS陀螺儀通常有兩個方向的可移動電容板。徑向的電容板加震蕩電壓迫使物體作徑向運動(有點像加速度計中的自測試模式),橫向的電容板測量由于橫向科里奧利運動帶來的電容變化(就像加速度計測量加速度)。因為科里奧利力正比于角速度,所以由電容的變化可以計算出角速度。
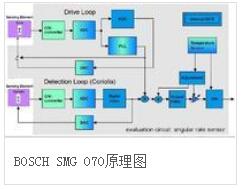
圖三是2軸MEMS陀螺儀。它采用了閉合回路、數(shù)字輸出和傳感器芯片跟ASIC芯片分開平放連線的封裝方法。來自(BOSCH SMG 070原理圖)
微機械陀螺儀的應(yīng)用
微機械陀螺儀用于測量汽車的旋轉(zhuǎn)速度(轉(zhuǎn)彎或者打滾),它與低加速度計一起構(gòu)成主動控制系統(tǒng)。所謂主動控制系統(tǒng)就是一旦發(fā)現(xiàn)汽車的狀態(tài)異常,系統(tǒng)在車禍尚未發(fā)生時及時糾正這個異常狀態(tài)或者正確應(yīng)對個異常狀態(tài)以阻止車禍的發(fā)生。比如在轉(zhuǎn)彎時,系統(tǒng)通過陀螺儀測量角速度就知道方向盤打得過多還是不夠,主動在內(nèi)側(cè)或者外側(cè)車輪上加上適當(dāng)?shù)膭x車以防止汽車脫離車道。這種系統(tǒng)主要安裝于高端汽車上。
在汽車MEMS市場,壓力計和加速度計還是占較大份額,(圖十四)但是隨著對汽車安全性能要求越來越高,尤其是在北美和歐洲穩(wěn)定性主控系統(tǒng)的安裝率節(jié)節(jié)攀升,陀螺儀的市場增長率明顯比前兩類要快,在2011年預(yù)期達(dá)到10%。
責(zé)任編輯:YYX
-
陀螺儀
+關(guān)注
關(guān)注
44文章
784瀏覽量
98714 -
微機械陀螺
+關(guān)注
關(guān)注
0文章
3瀏覽量
2703
發(fā)布評論請先 登錄
相關(guān)推薦
愛普生X2A0002710002 XV7011BB陀螺儀傳感器用于高精設(shè)備行業(yè)

陀螺儀x軸和y軸的應(yīng)用
解析愛普生(EPSON)陀螺儀傳感器XV-3510CB






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論