

隨著iPhone和iPad上激光雷達(dá)的使用,激光雷達(dá)的話題一下子火了,同時(shí)也讓原本火熱的自動(dòng)駕駛話題中,車載激光雷達(dá)的內(nèi)容更加熱火朝天。
本文的目的是通過(guò)激光雷達(dá)相關(guān)知識(shí)和話題的交流,讓大家對(duì)激光雷達(dá)有更加深入的認(rèn)識(shí),同時(shí)也期待能發(fā)掘激光雷達(dá)更加廣泛和深入的應(yīng)用。
計(jì)劃以下面一系列話題由淺入深進(jìn)展展開(kāi):
(一)What激光雷達(dá)是什么
(二)What車載激光雷達(dá)有哪些參與者&產(chǎn)業(yè)結(jié)構(gòu)
(三)Why為什么用激光雷達(dá)作用
(四)How怎么應(yīng)用
(五)How激光雷達(dá)怎么工作
(六)How激光雷達(dá)應(yīng)用想象篇
(一)What激光雷達(dá)是什么
激光雷達(dá)即Lidar,是以激光為載體進(jìn)行測(cè)距和探測(cè)的傳感器。既然是激光雷達(dá),那么就屬于雷達(dá)的一種,但有別與其他雷達(dá)的探測(cè)方式,是通過(guò)發(fā)射的激光進(jìn)行信息獲取。
| 雷達(dá)類型 | 頻率 | 性質(zhì) | 車載應(yīng)用 |
| 激光雷達(dá) | 10^14Hz | 光(電磁波) | ACC/AEB/ALC等 |
| 毫米波雷達(dá) | 10GHz—200GHz | 電磁波 | ACC/AEB/BSD等 |
| 超聲波雷達(dá) | 20KHz以上 | 機(jī)械波 | APA/APO/SVA等 |
激光雷達(dá)的分類介紹如下圖:
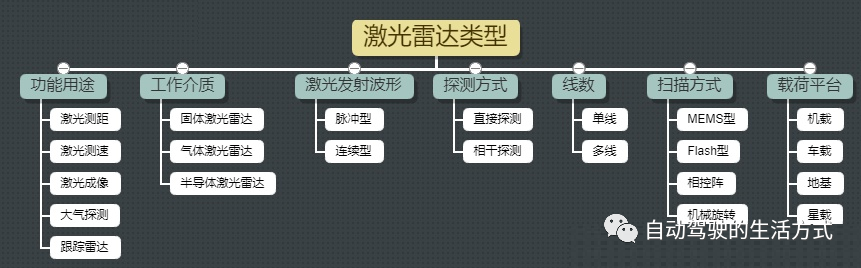
由于當(dāng)前激光雷達(dá)技術(shù)方案的分歧點(diǎn)在于掃描方式,所以通常按照掃描方式來(lái)分,可以分為:機(jī)械旋轉(zhuǎn)激光雷達(dá),混合半固態(tài)激光雷達(dá)和全固態(tài)激光雷達(dá)(Flash型和相控陣)。
再來(lái)看下激光雷達(dá)整體結(jié)構(gòu)框圖:
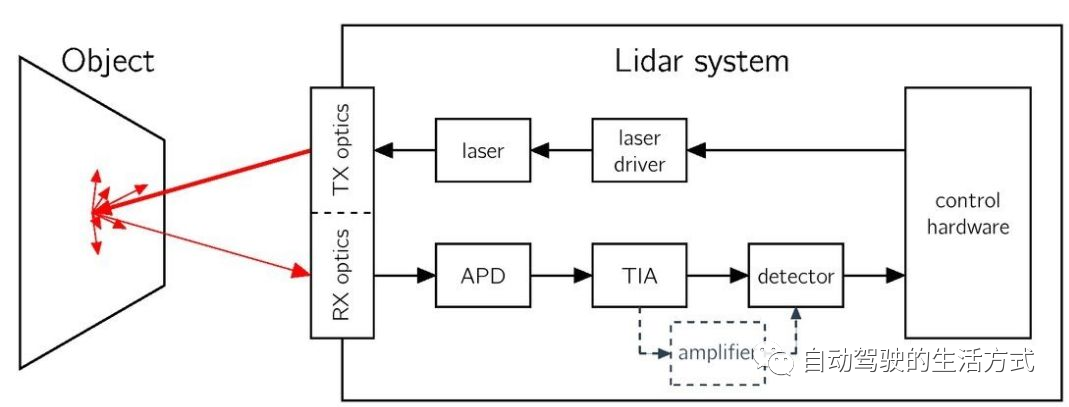
順便在這里粗略的說(shuō)一下激光雷達(dá)的工作原理,后面會(huì)有專門對(duì)激光雷達(dá)工作原理進(jìn)行更加詳細(xì)的研究。
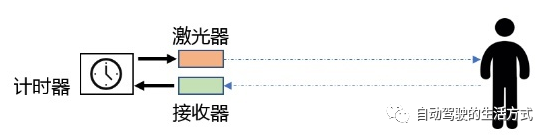
測(cè)距:不管是哪一類激光雷達(dá),目前在進(jìn)行測(cè)距的時(shí)候大多還是用ToF(Time of Flight)的原理,即發(fā)射光到達(dá)障礙物,障礙物進(jìn)行漫反射后部分反射光會(huì)到接收器中。而這個(gè)距離就是R=C*T/2。
測(cè)角:由于光路的可逆性,理論上可以認(rèn)為光回來(lái)的角度即出射角度,即物體角度可以由雷達(dá)的相對(duì)車輛位置和接收角度獲得。
測(cè)速:不好意思,單個(gè)脈沖由ToF不能直接測(cè)速。要實(shí)現(xiàn)測(cè)速需要進(jìn)行跟蹤和后期的軟件算法處理。FMCW激光笑而不語(yǔ)~(后面找個(gè)章節(jié)來(lái)展示下FMCW激光的能力)
測(cè)反射率:根據(jù)回光強(qiáng)度可以得到障礙物反射光的能力,即反射率。
測(cè)高/測(cè)寬:由于激光是以脈沖形式發(fā)出的,對(duì)于測(cè)高和測(cè)寬無(wú)法直接獲得,依賴于水平和垂直分辨率,可以通過(guò)點(diǎn)云信息在軟件算法處理后得到物體的高和寬的信息。
在車上的樣子:
超級(jí)可愛(ài)的無(wú)人駕駛車輛
可達(dá)到L3級(jí)別的自動(dòng)駕駛車輛
ET7小而美的激光雷達(dá)
看了這么高大上的雷達(dá)是不是馬上想要一個(gè)了。拿去年一個(gè)機(jī)械旋轉(zhuǎn)雷達(dá)來(lái)說(shuō)吧,來(lái)個(gè)段子~
A: 就挑一個(gè)還湊合的64線的吧,多少錢?
B:10萬(wàn)!!!
A:我去,這么貴。
B:美金!!!
A: What?
B:不含稅!!!
A:能不能再談?wù)劊?/p>
B:最好現(xiàn)金,還不一定有現(xiàn)貨...
好消息是技術(shù)在不斷進(jìn)步,激光雷達(dá)朝著固態(tài)化,小型化,低成本發(fā)展的路上大步前進(jìn)了,希望在以后的車上都能有激光雷達(dá)的身影
原文標(biāo)題:車載激光雷達(dá)詳解之激光雷達(dá)是什么(一)
文章出處:【微信公眾號(hào):自動(dòng)駕駛汽車電子系統(tǒng)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
責(zé)任編輯:haq
-
車載
+關(guān)注
關(guān)注
18文章
621瀏覽量
83687 -
激光雷達(dá)
+關(guān)注
關(guān)注
970文章
4115瀏覽量
191395 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14077瀏覽量
168472
原文標(biāo)題:車載激光雷達(dá)詳解之激光雷達(dá)是什么(一)
文章出處:【微信號(hào):gh_cc04d83f277c,微信公眾號(hào):自動(dòng)駕駛的生活方式】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
激光雷達(dá)技術(shù)在自動(dòng)駕駛汽車中的應(yīng)用

愛(ài)普生高精度車規(guī)晶振助力激光雷達(dá)自動(dòng)駕駛

自動(dòng)駕駛中的激光雷達(dá)是否會(huì)傷害人眼?
激光雷達(dá)技術(shù):自動(dòng)駕駛的應(yīng)用與發(fā)展趨勢(shì)

禾賽激光雷達(dá)助力寶馬智能工廠自動(dòng)駕駛
激光雷達(dá)光電組件的AEC-Q102認(rèn)證:保障自動(dòng)駕駛硬件的可靠性與品質(zhì)
智能駕駛浪潮下,車載激光雷達(dá)行業(yè)深度剖析與未來(lái)展望
激光雷達(dá)在自動(dòng)駕駛中的應(yīng)用
激光雷達(dá)與純視覺(jué)方案,哪個(gè)才是自動(dòng)駕駛最優(yōu)選?
L4自動(dòng)駕駛需求迭代,360°激光雷達(dá)也要進(jìn)入芯片化時(shí)代

激光雷達(dá)濾光片:自動(dòng)駕駛的“眼睛之選”

FPGA在自動(dòng)駕駛領(lǐng)域有哪些應(yīng)用?
百度蘿卜快跑第六代無(wú)人車攜手禾賽AT128激光雷達(dá),共筑自動(dòng)駕駛新篇章
中國(guó)激光雷達(dá)廠商引領(lǐng)全球車載市場(chǎng):禾賽獨(dú)占鰲頭,華為位列前五
納芯微GaN HEMT驅(qū)動(dòng)芯片NSD2017在激光雷達(dá)中的優(yōu)勢(shì)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論