 碳納米管紗線為何物?
碳納米管紗線為何物?
2021 年,機器人已經「成精」了,公然吵架、組團熱舞再也不是人類專屬。
然鵝在很多人心里,機器人還是僵硬、機械甚至冰冷的。
即便如此,技術日新月異,柔性機器人快速發展,我們對機器人的刻板印象也該被打破了。
科學家們設計出的軟體機器人在外形上可謂五花八門,比如:
由磁場驅動的軟體機器人,看上去像是花瓣一樣。
會奔跑、能游泳、能舉重物的“小獵豹”。
可用于軍事行動的快速隧道挖掘機器人。
其實,軟體機器人的設計往往與一種智能材料有關——人工肌肉。
最近在這一領域,我國科學家聯合美、韓、澳等多國學者做出了新突破!
相比傳統人工肌肉,此次研究人員設計出的人工肌肉具有無毒、驅動頻率高(10 Hz)、驅動電壓低(1 V)、高比能量(0.73~3.5 J/g)、高驅動應變(3.85~18.6 %)、高能量密度(高達8.17 W/g)的特性。
▍碳納米管紗線為何物?
2021 年 1 月 29 日,題為 Unipolar-Stroke, Electroosmotic-Pump Carbon Nanotube Yarn Muscles(單極沖程、電滲泵碳納米管紗線肌肉)的論文發表于著名學術期刊《科學》(Science)。
論文出自哈爾濱工業大學(復合材料與結構研究所)、江蘇大學(智能柔性機電研究所)、常州大學(江蘇省光伏科學與工程協同創新中心)、美國德克薩斯大學達拉斯分校、伊利諾伊大學厄巴納-香檳分校、韓國漢陽大學、首爾大學、澳大利亞臥龍崗大學、迪肯大學等團隊。
論文題目中有個看起來有點兒高深的詞「碳納米管紗線」(Carbon nanotube yarns),那么在談具體的研究細節之前,我們先來解決一個問題:碳納米管紗線為何物?
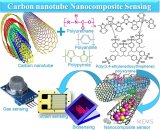
碳納米管紗線源自碳納米管——一種具有特殊結構的一維量子材料,徑向尺寸為納米量級、軸向尺寸為微米量級、管子兩端基本都有封口。外形上,它是由呈六邊形排列的碳原子構成的數層同軸圓管,層與層之間的固定距離約 0.34 nm,而圓管的直徑一般為 2~20 nm。
據了解,碳納米管作為一維納米材料,重量輕、有著完美的連接結構,因而有著獨特的力學、電學、化學性能。
基于這樣的奇特存在,碳納米管紗線也應運而生。
根據字面意思即可知,這是通過拉伸和松弛、由碳基納米管纖維制成的緊密絞合的紗線。
不同于普通意義上的紗線,碳納米管紗線其實是一種超導體,還可當電池使用——早在 2011 年,德克薩斯大學就與美國企業展開合作,致力于將碳納米管紗線推向市場。
2017 年,德克薩斯大學達拉斯分校又研制出一種名為 Twistron 的碳納米管紗線。
當時該研究團隊的李娜博士曾在采訪中表示:
這些紗線本質上是一種超級電容器,但無需外加電源充電。因為碳納米管與電解質的化學電勢不同,當紗線浸入電解質時,一部分電荷便會嵌入其中。紗線被拉伸時,體積減小,使電荷相互靠近,電荷產生的電壓增高,從而獲得電能。
2014-2016 年,一位名為楚合濤的博士生在哈爾濱工業大學和德克薩斯大學達拉斯分校接受聯合培養,也正是自那時起,哈爾濱工業大學冷勁松教授課題組與德克薩斯大學達拉斯分校 Ray H. Baughman 教授課題組開始了有關碳納米管紗線人工肌肉的研究。
此次,已是博士畢業生的楚合濤正是論文的共同一作。
▍人工肌肉性能實現新突破
那么,碳納米管紗線和人工肌肉之間,又有怎樣的聯系?
論文介紹,滲透離子(不論正負)會影響著長度、直徑的變化,因此碳納米管紗線可用作電化學致動器。
據悉,碳納米管紗線人工肌肉是一種典型的智能材料,主要通過熱、電化學兩種方式實現驅動,而兩種驅動方式存在著差別。
根據熱力學定律,熱驅動受著卡諾循環效率(Circulation efficiency in Kano,即有一個高溫熱源溫度 T1 和一個低溫熱源溫度 T2 的簡單循環)的制約——相比而言,電化學驅動的能量轉換效率更高,具有更廣闊的應用前景。
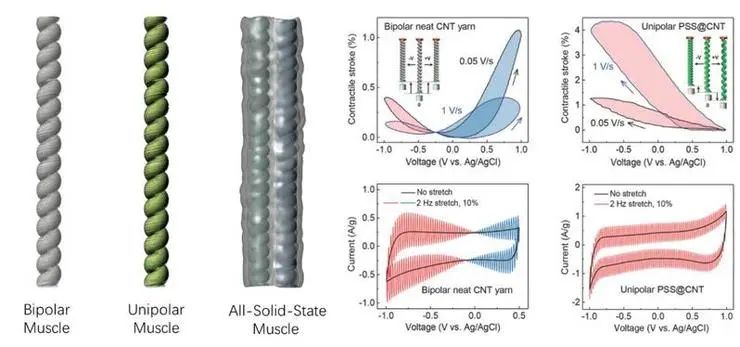
基于這一點,研究團隊構建了一種全固態肌肉(all-solid-state muscle)。通過向紗線中滲透帶電的聚合物,纖維開始部分膨脹,隨著離子的損失長度會增加,這樣也增加了肌肉的總沖程。
哈爾濱工業大學官方表示,研究人員首次發現通過聚電解質功能化的策略,可實現人工肌肉智能材料的“雙極”(Bipolar)驅動轉變為“單極”(Unipolar)驅動(如下圖所示),同時發現了人工肌肉隨電容降低、驅動性能增強的反常現象(Scan Rate Enhanced Stroke, SRES)。
具體而言,研究人員得到了如下效果:
實現了單一離子嵌入、嵌出的“單極”效應,解決了“雙極”效應反向離子的嵌入、嵌出引起的性能降低問題,提高了做功效率與能量密度等性能;
人工肌肉隨掃描速率增加,驅動性能增加,解決了傳統人工肌肉驅動性能的電容依賴性問題。
哈爾濱工業大學認為:
這一重要突破解決了人工肌肉驅動性能的電容依賴性問題,為后續設計具有無毒、低驅動電壓的高性能驅動器提供新的理論基礎。
值得一提的是, 這一突破在空間展開結構、仿生撲翼飛行器、可變形飛行器、水下機器人、柔性機器人、可穿戴外骨骼、醫療機器人等領域具有巨大的應用潛力。
▍關于作者
早在 20 世紀 90 年代初,哈爾濱工業大學復合材料與結構研究所就已確立了智能材料與結構的研究方向。
實際上哈工大在這一領域的探索,離不開一個名字——冷勁松。
博士畢業于哈爾濱工業大學復合材料專業的冷勁松教授自 2004 年起擔任著哈工大航天學院復合材料與結構研究所教授、博導的職務。

1992 年起,冷勁松教授就開始開展智能材料系統和結構的研究,主要研究方向包括智能材料系統和結構系統、光纖傳感器、結構健康監控、復合材料結構設計和工藝技術、可變翼飛行器、結構振動主動控制、光纖通訊和微波光電子器件、微機電系統等等。
另外,冷勁松教授也在 International Journal of Smart & Nano Materials 擔任主編,在 Smart Materials & Structures 和 Journal of Intelligent Material Systems and Structures 等國際雜志擔任副主編。2006 年入選教育部新世紀優秀人才計劃,2007 年入選長江學者特聘教授,2018 年當選歐洲科學院物理與工程學部外籍院士(Members of the Academia Europaea)。
值得一提的是,此次論文的通訊作者之一正是冷勁松教授。
2020 年 3 月 4 日,冷勁松教授團隊與美國馬里蘭大學 Norman M. Wereley 教授團隊的共同研究成果發表于國際著名期刊 Soft Robotics ,展示了一種受象鼻啟發的、在可伸展/收縮的氣動人工肌肉的基礎上設計的新型彎曲螺旋可伸展/收縮氣動人工肌肉(HE-PAMs/HC-PAMs)。
此次的研究,使得該團隊在人工肌肉方面的探索更為深入,未來這一領域還會有何突破,我們將保持關注。
責任編輯:lq
-
機器人
+關注
關注
211文章
28418瀏覽量
207107 -
Science
+關注
關注
0文章
22瀏覽量
3380 -
柔性機器人
+關注
關注
1文章
38瀏覽量
4551
原文標題:哈工大等實現人工肌肉重大突破登上Science!
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
安泰功率放大器應用:碳納米管薄膜YMUS超聲波噴涂
碳納米管在光電器件中的應用 碳納米管的功能化改性方法
碳納米管的結構與特性解析 碳納米管在能源儲存中的應用
碳納米管的導電性能介紹 碳納米管如何提高材料強度
碳納米管與石墨烯的比較 碳納米管在復合材料中的應用
碳納米管的主要應用領域 碳納米管在電子產品中的優勢
碳納米管介紹:性能突出的導電劑

ATA-7025高壓放大器在電致發光紗線性能研究中的應用
金銀納米顆粒對單壁碳納米管實現近紅外熒光增強

九號電動將于4月19日發布新品智能碳晶電池
日本中央大學研發新傳感器,無損檢測與三維重建獲突破

思特威推出國產5000萬像素尺寸手機圖像傳感器SC5000CS,美國將十多家中國企業列入"中國軍方企業名單&qu

碳納米管晶體管兼容已有半導體制程工藝,解決碳納米管均勻可控摻雜難題

Imec 與三井化學公司簽署戰略合作協議,將用于 EUV 光刻技術的 CNT 薄膜技術商業化





 工商網監
工商網監
評論