") 激光雷達的使命
激光雷達的使命
背景介紹
近日,中共中央、國務院印發(fā)了《國家綜合立體交通網(wǎng)規(guī)劃綱要》,并發(fā)出通知,要求各地區(qū)各部門結(jié)合實際認真貫徹落實。文件中特別指出,要提升智慧發(fā)展水平。推動智能網(wǎng)聯(lián)汽車與智慧城市協(xié)同發(fā)展,建設城市道路、建筑、公共設施融合感知體系,打造基于城市信息模型平臺、集城市動態(tài)靜態(tài)數(shù)據(jù)于一體的智慧出行平臺。
車路協(xié)同系統(tǒng)是通過無線通訊設備實現(xiàn)車、路信息交互和共享的系統(tǒng),更是推動智能網(wǎng)聯(lián)汽車行業(yè)的核心技術之一。在國家利好政策和5G商用的驅(qū)動下,中國車路協(xié)同行業(yè)市場規(guī)模將于2024年達到1841.1億元人民幣。專家表示中國車路協(xié)同行業(yè)將于2021-2022年迎來爆發(fā)式增長,屆時中國車路協(xié)同行業(yè)將步入大規(guī)模商業(yè)化階段,進而推動中國自動駕駛和智慧交通邁入新階段。
中國車路協(xié)同行業(yè)市場規(guī)模將于2024年達到1841.1億元人民幣,預計2020至2024年中國車路協(xié)同行業(yè)市場規(guī)模年復合增長率將達到67.9%
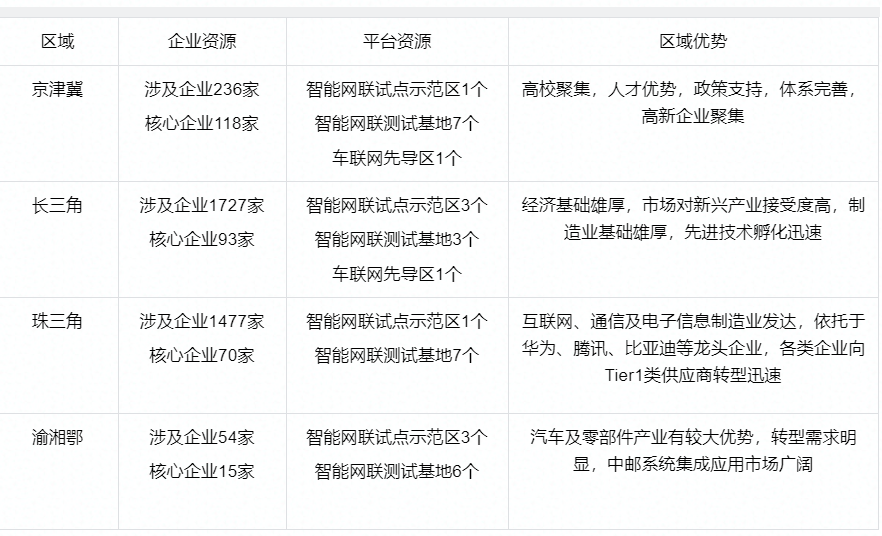
圖 2020-2024中國車路協(xié)同行業(yè)規(guī)模(按產(chǎn)值計算) 預測 隨著車路協(xié)同技術的逐漸普及,北京、上海、重慶和浙江等地區(qū)迅速出擊,頒布相應的地方性政策,根據(jù)城市特色建立智能網(wǎng)聯(lián)汽車試點示范區(qū)。 表 國內(nèi)熱點產(chǎn)業(yè)集群資源梳理
車路協(xié)同,最終需要提高的是車和路的“智能化水平”,以達到安全自動行駛的目的,也可以說,車路協(xié)同的智能化是無人駕駛實現(xiàn)的另一種進程。激光雷達是車端無人駕駛的核心感知傳感器,是路端的路側(cè)傳感器,也就是我們經(jīng)常說的路側(cè)單元RSU,通過5G和其他通信方式,為車輛提供交通環(huán)境信息。那么激光雷達需要如何做,才能完成路端的使命呢?
圖1 車路協(xié)同系統(tǒng)配合示意圖
一
激光雷達的使命
安全智能行駛,對于車和路來說,都是繞不開的話題。車路協(xié)同中,激光雷達不僅要完整、準確感知交通環(huán)境的各種車輛、人員、基礎設施的狀態(tài),還需要足夠的安全冗余,應對各種“長尾效應”帶來的問題。其實,真正的車路協(xié)同并不比自動駕駛門檻低。
圖2 北醒Horn系列激光雷達探測十字路口點云效果
二
為什么是激光雷達
攝像頭的缺陷主要來自于光線,在光線較差或強光干擾下,誤判率高。探測距離受到光線影響變短,精度變低等。采用單一攝像頭在路端計算需要極強的算力,信號傳輸和處理會有帶寬和實時性的影響等。毫米波的缺陷主要在于對完全靜止的物體幾乎沒有什么回波,而處于某些金屬干擾的環(huán)境下,容易產(chǎn)生誤報。激光雷達本身對環(huán)境光不依賴,24h全天時工作,因此大大增強了感知的適應性,對目標物的三維探測能力增強了探測的準確性,無論是靜態(tài)或動態(tài)物體,均可捕捉。 路端的場景十分復雜,以在流量較大的十字路口為典型。事實上,僅僅依靠一種技術手段,誤報、漏報都將成為安全隱患,無法對路況信息實現(xiàn)穩(wěn)定的智能檢測。如果將激光雷達與攝像頭融合,一次性獲得物體的位置、距離、尺寸、速度、方向、顏色等信息。
圖3 北醒Horn系列激光雷達識別十字路口車輛及行人 1. 極強的數(shù)據(jù)采集能力1.1 探測距離遠 機械旋轉(zhuǎn)雷達一般有效測距為150到200米,采用1550nm人眼安全的北醒Horn系列激光雷達,探測距離可以超過300米,300米意味著在路端布線時,可以減少硬件成本,降低施工壓力。 1.2分辨率高 市場上常見的激光雷達以16線、32線、64線為主,線束對應的參數(shù)是分辨率。圖像級激光雷達還是數(shù)字激光雷達,都是將線束做到非常高,從而后期算法要求降低了難度,降低感知層面的難度。北醒和一些激光雷達廠商為了解決遠距離小目標物探測能力,已經(jīng)將分辨率做到了300-600線。針對車路協(xié)同應用,路面目標物種類多、數(shù)量多的特點,分辨率越高越能快速識別出來。
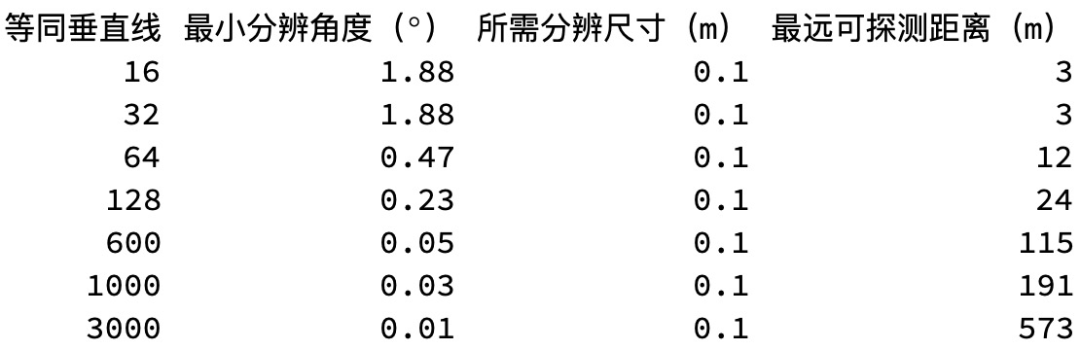
圖4 北醒Horn系列激光雷達探測的斑馬線 小目標物由于體積很小,因此激光雷達發(fā)射出去的光很難被接收回來。分辨率的高低主要由垂直角分辨率決定。垂直角分辨率的數(shù)值越小,代表則能探測到目標物的點越多,探測的清晰度越高,對于小目標物的點獲取越多。如下圖所示,垂直方向的間隔小,點云數(shù)量多。
圖5 同等距離下,垂直分辨率0.05°和0.1°的行人點云對比圖 在垂直方向角分辨率上,北醒激光雷達的垂直角分辨率可精確到0.05°,是64線激光雷達的9.4倍,可以對遠距離小目標物精準探測,對行人實際可探測與識別能力達到115米,而64線激光雷達線束過低,實際可探測與識別能力僅為12米以內(nèi)。 表1 激光雷達等同線數(shù)與可識別小物體(0.1m)的最遠距離關系
1.3 視場角廣 路口安裝的攝像頭的覆蓋區(qū)域一般只有10°左右,視野范圍較窄。360°機械旋轉(zhuǎn)雷達無疑擁有更多的視野,但是內(nèi)部旋轉(zhuǎn)結(jié)構(gòu)讓其使用壽命一直存疑。北醒Horn系列激光雷達不采取機械同軸旋轉(zhuǎn)結(jié)構(gòu),具有橫向90°的視場角度,探測范圍遠遠大于攝像頭,單臺可以覆蓋300m*300m的大場景。因此,檢測相同路口,安裝激光雷達的數(shù)量將遠少于攝像頭的數(shù)量。激光雷達方案比單一攝像頭方案更利于檢測大視野的闖紅燈區(qū)域。 2. 融合的數(shù)據(jù)的能力2.1 集成攝像頭等傳感器 單一的攝像頭方案只能提供二維信息,在強光或逆光時,拍攝及探測效果容易失效。特別在夜晚無環(huán)境光的情況下,攝像頭方案基本失去作用。傳統(tǒng)機械式雷達提供的點云非常稀疏,特別是掛在路測后,搜集到的有效點很少,很難與其它傳感器融合。 北醒激光雷達可以提供每秒超過280萬個點,最高1800*600的點云輸出,易于與攝像頭進行圖像融合。這樣的結(jié)合無論是汽車還是其他交通工具,均可以通過追蹤像素,達到避障、減速、繞行的目的。這無疑是為自動駕駛及輔助駕駛帶來新契機。
圖6 點云+攝像頭融合數(shù)據(jù)(左)和點云數(shù)據(jù)(右) 3. 部署方案簡單3.1 支持客戶部署方案 在車路協(xié)同應用中,為完美呈現(xiàn)Horn系列激光雷達的點云感知功能,北醒還將為客戶提供支持,輔助客戶基于北醒三維點云進行分析,各種傳輸協(xié)議,輔助客戶項目快速落地和交付,實現(xiàn)對行人闖紅燈報警、車輛碰撞預警、違法行為抓拍等功能。
圖7 基于北醒激光雷達實現(xiàn)的車輛識別 3.2 安裝部署 對于路測安裝的激光雷達來說,一般會選取高度在6-7米的電線桿或電警桿橫桿上。安裝位置一般靠近道路中央,如圖8所示,北醒Horn系列激光雷達探測距離遠且視場角寬,一臺即可同時檢測道路往返雙通道中不同車道上的目標物。對于視場角較小的雷達,至少需要安裝2臺以上激光雷達。
圖8 北醒Horn系列激光雷達路側(cè)安裝方式 4. 易集成量產(chǎn) 360°機械旋轉(zhuǎn)雷達由于機械旋轉(zhuǎn)激光雷達在工作過程中整體光學和電子器件模組不斷旋轉(zhuǎn),部件容易損耗,并且組裝雷達過程中需要每個發(fā)射器和接收光子探測器的視場角度一一對應,需要人工調(diào)教,不利于自動化生產(chǎn),量產(chǎn)較難。 市場上相對成熟、性能較好的是 32 線激光雷達,出貨幾千套的情況下報價為 4 萬美元一個。北醒激光雷達采取光學一體化設計,實現(xiàn)產(chǎn)品小型化、輕量化,通過布局整個大交通領域來逐步實現(xiàn)量產(chǎn),將成本大大降低。在車路協(xié)同應用中,綜合考慮布置數(shù)量和軟件能力,更快的降低總成本。
圖9 北醒Horn-X2激光雷達實拍圖
三
典型功能
城市道路 ETC高速公路 人車安全預警 觸發(fā)抓拍 交通違章檢測 車輛信息檢測 車流量統(tǒng)計 異常事件預警 交通綜合監(jiān)控和指揮管理 交通監(jiān)控和管理
責任編輯:lq
-
激光雷達
+關注
關注
968文章
4003瀏覽量
190157 -
無人駕駛
+關注
關注
98文章
4083瀏覽量
120723 -
智能網(wǎng)聯(lián)汽車
關注
9文章
1087瀏覽量
31111
原文標題:激光雷達在車路協(xié)同的“使命”是什么?
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關推薦
CES 2025激光雷達觀察:“千線”激光雷達亮相,頭部廠商布局具身智能

一則消息引爆激光雷達行業(yè)!特斯拉竟然在自研激光雷達?
激光雷達,明年要降價至200美元

激光雷達會傷害眼睛嗎?

激光雷達的維護與故障排查技巧
激光雷達技術的基于深度學習的進步
激光雷達技術的發(fā)展趨勢
光學雷達和激光雷達的區(qū)別是什么
一文看懂激光雷達

基于FPGA的激光雷達控制板

硅基片上激光雷達的測距原理

激光雷達的探測技術介紹 機載激光雷達發(fā)展歷程

華為詳細解讀激光雷達
激光雷達LIDAR基本工作原理






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論